技术特征:
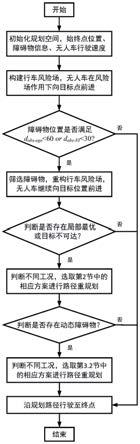
1.一种无人车局部动态避障路径规划方法,其特征在于:具体包括以下步骤:步骤一、针对无人车所在的局部避障行驶环境,分别建立所述环境中行驶目标点和障碍物对无人车的引力势场和斥力势场函数模型,用于反映所述目标点对无人车的引力与无人车位置的关系,以及障碍物对无人车的斥力与无人车位置的关系,并由所述引力与斥力构建行车环境风险场势力函数模型;步骤二、在所构建的行车环境风险场势力函数模型达到局部极小值车辆所受合力使车辆远离目标点时,确定对应的导致无人车无法行驶至目标点的车辆具体受力工况;步骤三、针对不同的所述车辆具体受力工况,分别提供对应的路径规划解决方案:
①
利用设置的虚拟目标点临时改变引力;
②
撤销位于行驶方向上且远于目标点的障碍物斥力;
③
根据障碍物数量改进引力势场函数模型;
④
对斥力进行分解并撤销某方向的斥力分量,使剩余斥力分量与引力的合力为趋近目标点的方向;步骤四、基于步骤三中所具体提供的解决方案,结合障碍物运动速度和方位设置动态路径规划周期、安全距离阈值、碰撞风险约束条件,以进行避障路径规划并实时滚动获取车辆位置与速度控制量;步骤五、利用贝塞尔曲线对所规划的避障路径中的车辆位置进行平滑处理,从而得到完整的无人车局部避障规划路径。2.如权利要求1所述的方法,其特征在于:步骤一中建立所述行车环境风险势力函数模型,具体包括以下过程:采用如下形式的目标点对无人车的引力势场函数模型:其中,η为引力势场正比例系数,d(x,x
goal
)为车辆当前位置坐标x与目标点位置坐标x
goal
之间的一个距离矢量,方向为从车辆指向目标点;对所述引力势场函数求导得到引力函数f
att
,其表达式为:其中,
▽
表示梯度函数;所述障碍物对无人车的斥力势场函数模型具体采用以下形式:其中,k为斥力势场正比例系数,d0为障碍物对车辆产生斥力的最大影响范围,x
obs
为障碍物的位置坐标,d(x,x
obs
)为车辆与障碍物之间的距离;对斥力势场函数求导可得到斥力函数f
rep
,其表达式为:所述行车环境风险场函数由目标点引力势场函数模型和障碍物斥力势场函数模型叠加形成,其表达式如下:
其中,n为对车辆产生斥力影响的障碍物个数;对所述行车环境风险场函数求导即得到所述行车风险场势力函数模型,其表达式如下:3.如权利要求1所述的方法,其特征在于:进一步地,步骤二中所述导致无人车无法行驶至目标点的车辆具体受力工况具体包括:工况一:障碍物位于车辆与目标点之间,目标点对车辆的引力与障碍物对车辆的斥力大小相等、方向相反,使车辆受力平衡,无法继续向目标点移动;工况二:障碍物位于行驶方向上但远于目标点,目标点对车辆的引力与障碍物对车辆的斥力大小相等、方向相反,使车辆受力平衡,无法继续向目标点移动;工况三:车辆朝向目标点的方向两侧存在两个以上障碍物,障碍物斥力与目标点引力的合力使车辆受力平衡,无法继续向目标点移动;工况四:车辆朝向目标点的方向两侧存在两个以上障碍物,障碍物斥力与目标点引力的合力使车辆远离目标点。4.如权利要求3所述的方法,其特征在于:步骤三中所提供的路径规划解决方案,针对所述各种工况具体执行以下操作:针对工况一提供解决方案
①
,通过提供一个位于目标点附近的虚拟目标点,使车辆在虚拟目标点的引力下,使所述行车风险场势力函数临时逃出局部极小值陷阱,在适合的时间再将所述虚拟目标点撤销;针对工况二提供解决方案
②
,障碍物位于行驶方向上但远于目标点时直接将该障碍物的斥力撤销,从而使所述行车风险场势力函数逃出局部极小值陷阱;针对工况三,首先判断根据障碍物的影响范围,判断障碍物之间的无影响间距是否满足车辆的侧向安全通过距离s
safe
,若满足车辆则提供解决方案
③
,根据障碍物个数n并利用以下方式对引力势场函数进行改进,以提高引力大小:η为引力势场正比例系数,d(x,x
goal
)为车辆当前位置坐标x与目标点位置坐标x
goal
之间的一个距离矢量,方向为从车辆指向目标点,n为对车辆产生斥力影响的障碍物个数;若不满足所述侧向安全通过距离s
safe
,则提供解决方案
①
使所述行车风险场势力函数临时逃出局部极小值陷阱;针对工况四提供解决方案
④
,对斥力进行分解并撤销某方向的斥力分量,使剩余斥力分量与引力的合力改变为趋近目标点的方向。5.如权利要求1所述的方法,其特征在于:步骤四中具体执行以下过程来进行避障路径规划:首先建立一条自我车辆到目标点的虚拟直线,其表达式如下:l
st
:y=k
st
x b
st
,x∈(x
ego
,x
target
)
其中,为直线l
st
的斜率,为直线l
st
的截距,(x
ego
,y
ego
)、(x
target
,y
target
)分别为车辆以及目标点的位置坐标;设障碍物到车辆的距离为d
obs-ego
,障碍物到直线l
st
的距离为d
obs-st
,d
obs-ego
或d
obs-st
的表达式如下:达式如下:其中,d
obs-ego
和d
obs-st
对应的安全阈值分别为d
obs-ego*
和d
obs-st*
;针对侧向动态障碍物,根据其运动方向,建立一条以障碍物当前位置坐标为起点,指向障碍物运动方向的射线,记为l
obs
,其表达式如下:l
obs
:其中,θ
obs
为障碍物的运动方向与水平轴的夹角;设射线l
obs
与所述直线l
st
的虚拟交点为p(x
p
,y
p
),联立两直线可求得虚拟交点p(x
p
,y
p
)的位置坐标;其横纵坐标表达式如下:基于所述虚拟碰撞点p,分别计算车辆与障碍物从当前位置到达虚拟碰撞点p所需的时间;设车辆当前车速为v
ego
,加速度为a
ego
,障碍物当前速度为v
obs
,加速度为a
obs
,二者分别以当前运动状态驶向点p耗时分别为t
ego-p
、t
obs-p
,其表达式如下:其表达式如下:其表达式如下:其表达式如下:其中,s
ego-p
为自我车辆当前位置到虚拟交点p的距离,s
obs-p
为障碍物车辆当前位置到虚拟交点p的距离;
通过比较t
obs-p
与t
ego-p
的大小并结合车辆与障碍物之间的距离,判断出车辆与侧向障碍物碰撞的风险并维持或调整车辆的行驶状态;针对同向动态障碍物,根据无人车当前速度、障碍物速度以及无人车与障碍物之间的距离,判断出车辆与侧向障碍物碰撞的风险并维持或调整车辆的行驶状态。6.如权利要求1所述的方法,其特征在于:步骤五中采用以下形式的贝塞尔曲线对所规划的避障路径中的车辆位置进行平滑处理:其中,p(s)为控制点,s为变量,p(i)代表位置点坐标,b
i,n
(s)为n次伯恩斯坦多项式,可表示为:式中,n表示贝塞尔曲线的阶数,位置点个数为n 1,控制点个数为n-1。
技术总结
本发明提供了一种无人车局部动态避障路径规划方法,其通过改进人工势场法,解决了传统人工势场法目标不可达和部分工况下局部最优的问题,使无人车克服局部震荡,从而能够规划出一条满足避障要求的规划的局部规划路径;本发明的方法在路径规划过程中,加入了车辆运动学与动力学性能要求,设置碰撞安全优先级,保证了规划路径的平滑性,满足下层车辆跟踪器的跟踪要求;通过对道路环境中存在复杂动态障碍物的工况进行分析,本发明可分别针对侧向动态障碍物和同向障碍物进行避障规划,并将两种工况结合,使得规划算法满足多动态障碍物工况避障,提高了规划算法的适用性和有效性。提高了规划算法的适用性和有效性。提高了规划算法的适用性和有效性。
技术研发人员:张雪莹 翟丽 王承平
受保护的技术使用者:北京理工大学
技术研发日:2022.02.10
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。