1.本技术涉及汽车的篷布控制领域,尤其是涉及车用电动篷布控制电路及装置。
背景技术:
2.随着社会的发展,汽车的应用越来越广泛,其中,有些汽车带有车斗,某些车主会在车斗上加装车篷,利用篷布对车斗进行遮盖。车篷包括棚架和篷布,棚架安装在车斗上,篷布则固定在棚架上,棚架用于支撑篷布,使得车斗在能够被篷布遮盖的情况下还能够盛放物品。
3.相关技术中,在棚架上设置电机和连接装置,并且篷布未与棚架固定,篷布与连接装置固定,电机输出轴与连接装置固定,电机以某个固定的转速转动提供动力,从而利用连接装置对篷布进行拖拽,进而使篷布能够在棚架上移动。
4.发明人认为,在利用电机对篷布进行拖拽时,电机只能以某个固定的转速转动,难以适用于不同要求的使用情况。
技术实现要素:
5.为了调节电机转速的适用性,本技术提供了车用电动篷布控制电路及装置。
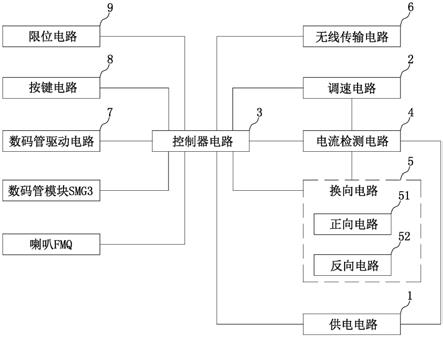
6.本技术提供的车用电动篷布控制电路,采用如下的技术方案:车用电动篷布控制电路,包括供电电路、调速电路和控制器电路;所述调速电路的输入端连接于所述控制器电路,所述调速电路的输出端用于连接电机,所述控制器电路和所述调速电路均连接于所述供电电路;所述调速动电路用于调节输出电压从而调节所述电机转速;所述控制器电路用于向所述电机驱动电路输出控制电信号;所述供电电路用于供电。
7.通过采用上述技术方案,供电电路为整个电路供电,从而使电路能够工作,利用控制器输出控制电信号,调速电路根据控制电信号对电机进行速度调节,从而实现对电机进行调速的功能。
8.可选的,所述调速电路包括两个驱动器电路和h桥电路,两个所述驱动电路的输出端均连接于所述h桥电路的输入端,两个所述驱动器电路的输入端连接于所述调速电路的输入端,所述h桥电路的输出端用于连接所述调速电路的输出端。
9.通过采用上述技术方案,采用h桥电路可以在能够对电机进行调速的基础上还能够改变电机的转向,利用驱动器电路对h桥电路进行驱动,相较于控制器电路直接驱动h桥电路,更加稳定。
10.可选的,还包括至少一个换向电路,所述换向电路的输入端连接于所述控制器电路,所述换向电路的输出端用于连接电机。
11.通过采用上述技术方案,控制器输出控制电信号,利用换向电路对其它电机进行换向,在对更多电机进行控制时也能够实现电机的换向。
12.可选的,所述换向电路包括正向电路和反向电路,所述正向电路和所述反向电路均包括光耦合器,光耦合器的触发端连接于所述换向电路的输入端。
13.通过采用上述技术方案,利用光耦合器实现电气隔离,将电路部分的低压区域与外部的高压区域隔离,从而减小干扰,并且也能减小由于高压区域出现异常后导致低压区域损坏的可能性。
14.可选的,还包括无线传输电路,所述无线传输电路连接于控制器电路,所述无线传输电路用于接收遥控的无线信号并将无线信号转换为电信号。
15.通过采用上述技术方案,利用接收模块可以接受遥控的无线信号,使用者通过使用遥控发送信号,从而远程控制电机的转动,能够提高操控的便利性。
16.可选的,还包括数码管驱动电路、按键电路和数码管模块smg3,所述数码管驱动电路的控制端连接于所述控制器电路,所述数码管驱动电路的输出端连接于所述数码管模块smg3,所述按键电路的输出端也连接于所述数码管模块smg3,同时所述按键电路也与所述数码管驱动电路连接。
17.通过采用上述技术方案,利用按键电路修改参数,同时通过数码管驱动电路驱动数码管模块显示,数码管显示的内容则为参数数值,便于使用者查看从而了解设置情况。
18.可选的,还包括电流检测电路,所述电流检测电路的输入端连接于供电电路,所述电流检测电路的输出端连接于所述调速电路和所述换向电路。
19.通过采用上述技术方案,电流检测电路用于检测电路的电流,通过检测电流,便于了解电路情况,便于管控。
20.第二方面,本技术提供的车用电动篷布控制装置,采用如下的技术方案:车用电动篷布控制装置,包括第一方面所述的车用电动篷布控制电路和电机,所述电机连接于所述调速电路的输出端。
21.综上所述,本技术包括以下至少一种有益技术效果:1.利用控制器输出控制电信号,调速电路根据控制电信号对电机进行速度调节,从而实现对电机进行调速的功能;2.采用h桥电路可以在能够对电机进行调速的基础上还能够改变电机的转向,利用驱动器电路对h桥电路进行驱动,相较于控制器电路直接驱动h桥电路,更加稳定;3.利用光耦合器实现电气隔离,将电路部分的低压区域与外部的高压区域隔离,从而减小干扰,并且也能减小由于高压区域出现异常后导致低压区域损坏的可能性。
附图说明
22.图1是本技术实施例的电路连接的结构框图。
23.图2是本技术实施例的供电电路的原理图。
24.图3是本技术实施例的控制器电路的原理图。
25.图4是本技术实施例的电流检测电路的原理图。
26.图5是本技术实施例的调速电路的原理图。
27.图6是本技术实施例的h桥电路的原理图。
28.图7是本技术实施例的第一正向电路的原理图。
29.图8是本技术实施例的第一反向电路的原理图。
30.图9是本技术实施例的接收模块的原理图。
31.图10是本技术实施例的数码管驱动电路的原理图。
32.附图标记说明:1、供电电路;2、调速电路;21、第一驱动器电路;22、第二驱动器电路;23、h桥电路;3、控制器电路;4、电流检测电路;41、第一电流检测电路;42、第二电流检测电路;5、换向电路;51、正向电路;52、反向电路;6、无线传输电路;7、数码管驱动电路;8、按键电路;9、限位电路。
具体实施方式
33.以下结合附图1-10及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
34.本技术实施例公开车用电动篷布控制电路。参照图1,车用电动篷布控制电路包括供电电路1、调速电路2和控制器电路3。
35.本实施例中,调速电路2的输入端连接于控制器电路3,调速电路2的输出端用于连接电机,控制器电路3和调速电路2均连接于供电电路1。控制器电路3输出pwm信号,调速电路2根据pwm信号调节供电电路1为电机供电的电压,从而实现对电机的调速。
36.参照图2,进一步地,供电电路1包括dc电源接口、保险丝bxs1、二极管da1、开关电源芯片ic1和降压芯片ic2,dc电源接口用于连接外部电源,dc电源接口的1引脚连接于保险丝bxs1的1引脚,保险丝bxs1的2引脚连接于二极管da1的阳极端,保险丝bxs1的2引脚还连接有dc 供电端,二极管da1的阴极端连接于开关电源芯片ic1的1引脚,并且二极管da1的阴极端还连接有24v供电端。24v供电端连接有电容器ca1,电容器ca1的另一端接地,电容器ca1的两端并联有电容器cb1。
37.进一步地,开关电源ic1的2引脚连接有电感器la1,电感器la1的另一端连接有vcc供电端,开关电源ic1的2引脚还连接有二极管da2,二极管da2的阳极端接地,开关电源ic1的4引脚、5引脚、6引脚、7引脚和8引脚均接地。vcc供电端输出12v电压,vcc供电端连接有电容器ca2,电容器ca2的另一端接地,电容器ca2的两端并联有电容器cc1,电容器ca2的两端还并联有电容器cc2。
38.开关电源芯片ic1的3引脚连接于降压芯片ic2的3引脚,降压芯片ic2的1引脚连接有5v供电端,降压芯片ic2的2引脚接地。5v供电端连接有电容器ca3,电容器ca3的两端并联有电容器cc3。
39.开关电源芯片ic1可选型号为xl1509-12v的芯片,降压芯片ic2可选型号为78l05的芯片。
40.dc电源接口连接外部电源,外部电源为24v,先经过保险丝bxs1,保险丝bxs1起到保护作用,在电路出现问题导致电流异常时,保险丝bxs1熔断,减小整个电路损坏的可能性。然后外部电源被开关电源芯片ic1转换为12v电压并在vcc供电端输出,降压芯片ic2对vcc供电端输出的12v电压进行降压并在5v供电端输出5v电压。
41.参照图2和图3,作为本实施例的一种可选实施方式,控制器电路3包括控制器u1,控制器u1的10引脚和11引脚均连接于5v供电端,控制器u1的12引脚接地。控制器u1可选型号为stc8h的芯片。
42.参照1和图4,作为本实施例的一种可选实施方式,控制电路还包括电流检测电路
4。本实施例中电流检测电路4包括第一电流检测电路41和第二电流检测电路42,第一电流检测电路41和第二电流检测电路42的电子元件组成和电阻元件的连接关系均相同,只是与其他电路的连接点不同。第一电流检测电路41的输入端连接于dc 供电端,第一电流检测电路41的输出端连接于电源端dljc1,第二电流检测电路42的输入端连接于dc 供电端,第二电流检测电路42的输出端连接于电源端dljc2。
43.进一步地,此处以第一电流检测电路41为例进行介绍,第一电流检测电路41包括电流传感器ic7、电阻器rb7、二极管dd2、二极管dd1、电容器ca7、电容器ca8、电容器cd1和二极管db3,电流传感器ic7的5引脚连接于第一电流检测电路41的输入端,即电流传感器ic7的5引脚连接于dc 供电端,电流传感器ic7的5引脚还连接于二极管dd1的阴极端,二极管dd1的阳极端接地,电流传感器ic7的4引脚连接于电源端dljc1,电流传感器ic7的4引脚还连接于二极管dd2的阴极端,二极管dd2的阳极端接地,电流传感器ic7的1引脚连接于5v供电端,电流传感器ic7的2引脚接地,电流传感器ic7的3引脚连接于电阻器rb7,电阻器rb7的另一端接连接于输出端ad1,输出端ad1连接于控制器u1的1引脚,电容器ca8的一端连接于输出端ad1,电容器ca8的另一端接地。5v供电端还连接于电容器ca7,电容器ca7的另一端接地,电容器cd1与电容器ca7并联,二极管db3的阴极端连接于5v供电端,二极管db3的阳极端接地。
44.进一步地,第二电流检测电路42包括电流传感器ic8,电流传感器ic8的5引脚连接于dc 供电端,电流传感器ic8的4引脚连接于电源端dljc2,电流传感器ic8的3引脚经过电阻器r88连接于控制器u1的2引脚。
45.第一电流检测电路41和第二电流检测电路42中的电流传感器可选型号为acs758lcb-100b的传感器。
46.参照图1、图5和图6,作为本实施例的一种可选实施方式,调速电路2包括第一驱动器电路21、第二驱动器电路22和h桥电路23,第一驱动器电路21的输入端连接于调速电路2的输入端,第二驱动器电路22的输入端也连接于调速电路2的输入端,第一驱动器电路21和第二驱动器电路22两者的输出端均连接于h桥电路23的输入端,h桥电路23的输出端包括输出端m 和输出端m-,输出端m 用于连接电机的正极,输出端m-用于连接电机的负极,h桥电路23的供电端连接于电源端dljc1。
47.进一步地,第一驱动器电路21包括第一驱动器ic5,第一驱动器ic5的2引脚和3引脚分别连接于控制器u1的30引脚和29引脚,第一驱动器ic5的7引脚连接有电阻器rf1,电阻器rf1的另一端连接于mos管qa1的栅极,第一驱动器ic5的5引脚连接有电阻器rf5,电阻器rf5的另一端连接于mos管qa2的栅极。第一驱动器ic5的6引脚连接于h桥电路23的输出端m-。
48.进一步地,第二驱动器电路22包括第二驱动器ic6,第二驱动器ic6的2引脚和3引脚分解连接于控制器u1的31引脚和32引脚,第二驱动器ic6的7引脚连接有电阻器rf9,电阻器rf9的另一端连接于mos管qa3的栅极,第二驱动器ic9的5引脚连接有电阻器rf13,电阻器rf13的另一端连接于mos管qa4的栅极。第二驱动器ic6的6引脚连接于h桥电路23的输出端m 。
49.进一步地,h桥电路23包括mos管qa1、mos管qa2、mos管qa3和mos管qa4,mos管qa1的漏极连接于mos管qa3的漏极,mos管qa1的源极连接于mos管qa2的漏极,mos管qa2的源极连
接于mos管qa4的源极并且mos管qa2的源极接地,mos管qa4的漏极连接于mos管qa3的源极,h桥电路23的供电端连接于mos管qa1的漏极,即mos管qa1的漏极连接于电源端dljc1,电源端dljc1连接有电容器ce1,电容器ce1的另一端接地。
50.控制器u1输出pwm信号,第一驱动器电路21和第二驱动器电路22根据pwm信号控制h桥电路23的通断,调节电机的输入电压,从而控制电机的转速,并且利用h桥电路23,也能够控制电机的转向。
51.参照图1,作为本实施例的一种可选实施方式,控制电路还包括三个换向电路5,换向电路5包括正向电路51和反向电路52,正向电路51和反向电路52组成的电子元件相同,本实施例中三个换向电路5分别为第一换向电路、第二换向电路和第三换向电路,对应的第一换向电路包括第一正向电路和第一反向电路,以此类推,此处不再赘述,区别在于与控制器电路3连接端口和供电端口不同。本实施例中的正向电路和反向电路是相对,只是为表明两个电路控制电机向不同方向转动。
52.参照图7和图8,进一步地,第一正向电路的控制端cf1和第一反向电路的控制端cf2均连接于控制器电路3。此处以第一换向电路为例进行介绍。
53.第一正向电路包括光耦合器q1、电阻器rb1、电阻器re3、三极管qa1、led2、电阻器r3、二极管dc3、继电器k1、电阻器ry1和电阻器ry2,光耦合器q1的1引脚连接于电阻器rb1,电阻器rb1的另一端连接于5v供电端,光耦合器q1的2引脚连接于第一正向电路的控制端cf1,第一正向电路的控制端cf1连接于控制器u1的28引脚,光耦合器q1的4引脚连接于5v供电端,光耦合器q1的3引脚连接于电阻器re3;电阻器re3的另一端连接于三极管qa1的基极,三极管qa1的发射极接地,三极管qa1的集电极连接于led2的阴极端,led2的阳极端连接于电阻器r3,电阻器r3的另一端连接于24v供电端,二极管dc3的阴极端连接于24v供电端,二极管dc3的阳极端连接于三极管qa1的集电极,继电器k1的4引脚连接于24v供电端,继电器k1的5引脚连接于三极管qa1的集电极,继电器k1的1引脚连接于电源端dljc1,继电器k1的2引脚接地,继电器k1的3引脚和6引脚均连接于输出端com1,输出端com1连接于电阻器ry1,电阻器ry1的另一端连接于电源端dljc1,输出端com1还连接于电阻器ry2,电阻器ry2的另一端接地,输出端com1用于连接电机的正极。
54.进一步地,第一反向电路的控制端cf2连接于控制器u1的27引脚,继电器k2的1引脚也连接于电源端dljc1,继电器k1的3引脚和6引脚连接于输出端com2,输出端com2与电源端dljc之间连接有电阻器ry3,输出端com2连接有电阻器ry4,电阻器ry4的另一端接地,输出端com2用于连接电机的负极。
55.进一步地,第二换向电路包括第二正向电路和第二反向电路,第二正向电路的控制端cf3连接于控制器u1的26引脚,第二正向电路的输出端com3用于连接电机的正极,第二正向电路还包括的继电器k3,继电器k3的1引脚连接于电源端dljc2。第二反向电路的控制端cf4连接于控制器u1的25引脚,第二反向电路的输出端com4用于连接电机的负极。
56.第三换向电路包括第三正向电路和第三反向电路,第三正向电路的控制端cf5连接于控制器u1的24引脚,第三正向电路的输出端com5用于连接电机的正极,第二正向电路还包括继电器k4,继电器k4的1引脚连接于电源端dljc2。第二反向电路的控制端cf6连接于控制器u1的23引脚,第二反向电路的输出端com4用于连接电机的负极。
57.此处以第一换向电路进行举例说明,控制器u1的28引脚输出低电平信号,光耦合
器q1的发光器导通发光,从而使光耦合器q1的受光器受光,进而使光耦合器q1的3引脚输出高电平,此时三极管qa1的集电极与发射极导通,led2亮起,继电器k1工作,从而使继电器k1的3引脚和1引脚连通,即输出端com1和电源端dljc1连通。控制器u1的27引脚输出高电平信号,光耦合器q2的3引脚为低电平,此时三极管qa2的集电极与发射极未导通,led3未亮起,继电器k2不工作,继电器k2的3引脚与2引脚连通,即输出端com2接地。
58.上述过程为控制器u1同时输出不同的电平信号,使输出端com1和输出端com2之间存在压差,则连接于输出端com1和输出端com2之间的电机转动。当控制器u1在27引脚和28引脚输出的高低电平信号互换,则由于输出端com1和输出端com2的输出电压互换,电机向相反的方向转动,从而达到电机换向的效果。
59.参照图1、图3和图9,作为本实施例的一种可选实施方式,控制电路还包括无线传输电路6,无线传输电路6的连接端连接于控制器电路3。无线传输电路6包括接收模块ykq,接收模块ykq的4引脚至12引脚均连接于无线传输电路6的连接端。接收模块ykq的4引脚连接于控制器u1的22引脚,接收模块ykq的5引脚连接于控制器u1的21引脚,接收模块ykq的6引脚至11引脚顺次连接于控制器u1的20至15引脚,接收模块ykq的12引脚连接于控制器u1的9引脚。接收模块ykq的13引脚接地,接收模块ykq的14引脚连接于5v供电端。其中接收模块ykq可选型号为rxc68的8路接收模块。
60.参照图1,作为本实施例的一种可选实施方式,控制电路还包括数码管驱动电路7、按键电路8和数码管模块smg3,数码管驱动电路7的控制端连接于控制器电路3,数码管驱动电路7的输出端连接于数码管模块smg3,按键电路8的输出端也连接于数码管模块smg3,同时按键电路8也与数码管驱动电路7连接。数码管模块smg3可选4位共阴极数码管,其尺寸为0.36寸。
61.参照3和图10,进一步地,数码管驱动电路7包括数码管驱动芯片ic4和电容器ca21,数码管驱动芯片的10引脚连接于5v供电端,同时还连接于电容器ca21,电容器ca21的另一端接地。数码管驱动芯片ic4可选型号为tm650的芯片。
62.进一步地,按键电路8包括第一按键s1、第二按键s2、第三按键s3、第四按键s4和电阻器r12,第一按键s1的一端连接于电阻器r12,第一按键s1的另一端连接于数码管驱动芯片ic4的8引脚,第二按键s2的一端连接于电阻器r12,第二按键s2的另一端连接于数码管驱动芯片ic4的9引脚,第三按键s3的一端连接于电阻器r12,第三按键s3的另一端连接于数码管驱动芯片ic4的11引脚,第四按键s4的一端连接于电阻器r12,第四按键s4的另一端连接于数码管驱动芯片ic4的12引脚,电阻器r12的另一端连接于数码管驱动芯片ic4的1引脚。
63.进一步地,数码管模块smg3的1引脚连接于数码管驱动芯片ic的13引脚,数码管模块smg3的2引脚连接于数码管驱动芯片ic4的12引脚,数码管模块smg3的3引脚连接于数码管驱动芯片ic4的16引脚,数码管模块smg3的4引脚连接于数码管驱动芯片ic4的11引脚,数码管模块smg3的5引脚连接于数码管驱动芯片ic4的15引脚,数码管模块smg3的6引脚连接于数码管驱动芯片ic的7引脚,数码管模块smg3的7引脚连接于数码管驱动芯片ic4的9引脚,数码管模块smg3的8引脚连接于数码管驱动芯片ic4的6引脚,数码管模块smg3的9引脚连接于数码管驱动芯片ic4的5引脚,数码管模块smg3的10引脚连接于数码管驱动芯片ic4的14引脚,数码管模块smg3的11引脚连接于数码管驱动芯片ic4的8引脚,数码管模块smg3的12引脚连接于数码管驱动芯片ic4的1引脚。
64.接收模块ykq用于接收遥控器发送的遥控信号,接收模块ykq将接收的遥控信号转换为电信号传输至控制器u1,控制器u1根据电信号做出相应的动作。举例说明,使用者按压遥控器上的一个按键,可以控制电机的正转,另一个按键可以控制电机反转。此时,使用者可以在控制篷布移动的同时观察篷布的移动情况,提高了使用的便利性。
65.使用者可以利用第一按键s1、第二按键s2、第三按键s3和第四按键s4,对控制电路的参数进行设置,从而使控制电路在使用时更能够符合使用者的要求或者习惯。举例说明,长按第一按键s1,进入设置模式,第二按键s2和第三按键s3对参数进行加或者减,从而使参数数值增大或者减小,在使用者修改此项设置后再次按下第一按键s1,切换为下一项设置,以此类推,此处不再赘述,直至最终将所有项设置完成,此时再次按下第一按键s1则退出设置模式。第四按键s4作为学习键,长按进入学习模式。
66.参照图1和图3,作为本实施例的一种可选实施方式,控制电路还包括四个限位电路9,四个限位电路9分别为第一限位电路、第二限位电路、第三限位电路和第四限位电路,上述四个限位电路的由相同的电子元件组成,只是连接端口存在区别。
67.本实施例以第一限位电路为例,第一限位电路的输出端连接于控制器u1的13引脚,第一限位电路包括光耦合器q7、电阻器rd1和电阻器ra1,光耦合器q7的1引脚连接与电阻器rd1,电阻器rd1的另一端连接于5v供电端,光耦合器q7的2引脚连接有in1连接端,光耦合器q7的3引脚接地,光耦合器q7的4引脚连接于电阻器ra1,电阻器ra1的另一端连接于5v供电端,光耦合器q7的4引脚还连接于第一限位电路的输出端,即光耦合器q7的4引脚连接于控制器u1的14引脚。控制器u1的14引脚为复用引脚,此处控制器u1的14引脚用于接收电信号,从而获悉光耦合器q7是否被触发。
68.第二限位电路的输出端连接于控制器u1的6引脚,第三限位电路的输出端连接于控制器u1的7引脚,第四限位电路的输出端连接于控制器u1的8引脚。
69.四个限位电路中的光耦合器均可选用型号为pc817c的光耦合器。
70.参照图10,作为本实施例的一种可选实施方式,控制电路还包括接口smg1和接口smg2,接口smg1的1引脚连接于5v供电端,接口smg1的2引脚接地,接口smg1的3引脚连接于数码管驱动芯片ic4的3引脚,接口smg1的4引脚连接于数码管驱动芯片ic4的2引脚。接口smg2的4引脚连接于5v供电端,接口smg2的3引脚接地,接口smg2的2引脚连接于数码管驱动芯片ic4的3引脚,接口smg2的1引脚连接于数码管驱动芯片ic4的2引脚。
71.参照图3,作为本实施例的一种可选实施方式,控制电路还包括下载口pz_4、电容器ca4、电容器cc4和二极管db2,下载口pz_4的1引脚连接于5v供电端,下载口pz_4的2引脚连接于控制器u1的13引脚,下载口pz_4的3引脚连接于控制器u1的14的引脚,下载口pz_4的4引脚接地。
72.利用下载口pz_4,方便对控制器u1进行烧录程序,从而使电路能够实现所需功能,同时也方便进行调校。
73.参照图3,作为本实施例的一种可选实施方式,控制电路还包括喇叭fmq,喇叭fmq的1引脚连接于控制器u1的5引脚,喇叭fmq的2引脚接地。
74.本技术实施例车用电动篷布控制电路的实施原理为:供电电路对外部电源进行处理,从而输出24v、12v和5v电压,用于为整个电路进行供电。
75.调速电路和第一换向电路均由第一电流检测电路41的输出供电,此时第一电流检
测电路41对调速电路和第一换向电路两者对电机控制时的电流进行检测,控制器u1利用第一电流检测电路41获取电流值。第二换向电路和第三换向电路均由第二电流检测电路42的输出供电,第二电流检测电路42对第二换向电路和第三换向电路两者对电机控制时的电流进行检测,控制器u1利用第二电流检测电路42获取电流值。
76.控制器u1输出pwm电信号,调速电路接收pwm电信号后对电机起到调节转速的作用,并且h桥电路的设计,也能够在调节电机转速的同时改变电机的转动方向。三个换向电路也是用于根据控制器u1输出的控制电信号,从而改变换向电路输出的正负极性,进而改变电机的转向。换向电路中的光耦合器用于电气隔离,将高压区域与低压区域隔离,从而减小电路由于高压区域异常导致低压区域损坏的可能性。
77.无线传输电路中的接收模块ykq用于接收配套使用的遥控发送的遥控信号,接收模块ykq接收遥控信号后输出电信号至控制器u1,控制器u1根据接收模块ykq输出的电信号做出对应的控制动作,通过设置接收模块ykq,使用者可以使用遥控进行控制,提高了便利性。
78.使用者可以利用第一按键s1、第二按键s2、第三按键s3和第四按键s4,对电路参数进行设置,同时,数码管也能够显示设置参数,提高了便利性。
79.四个限位电路用于检测篷布是否到达极限位置,其中第一限位电路和第二限位电路中的光耦合器的输入端固定在最大极限位置,第三限位电路和第四限位电路中的光耦合器的输入端固定在最小极限位置,当篷布移动至最大极限位置时,利用光耦合器的输入端触发光耦合器,此时控制器u1接收低电平信号,控制器u1停止为电机供电,即电机停止转动,从而减小由于电机持续转动超出最大极限位置导致篷布损坏。同理,在最小极限位置设置第三限位电路和第四限位电路,也是用于保护篷布。
80.本技术实施例还公开车用电动篷布控制装置。车用电动篷布控制装置包括上述车用电动篷布控制电路和多个电机,电机连接于调速电路的输出端和换向电路的输出端。
81.调速电路根据控制器u1的输出电信号控制电机的转速和转向,换向电路根据控制器u1输出的控制电信号控制电机的转向。
82.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。