技术特征:
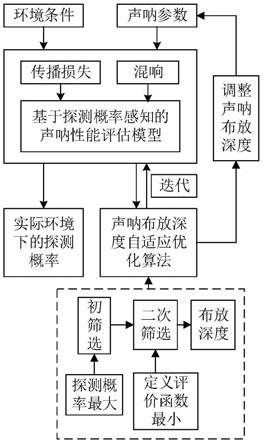
1.一种浅海动态环境下蛙人探测声呐部署优化方法,该方法包括:将待布放声呐布放在目标海区内,形成声呐工作海区,并记录待布放声呐的初始位置,同时在水平和深度方向分别以预设的步长进行栅格化,得到多个栅格工作海区;根据获取的声呐工作海区的环境条件和待布放声呐的声呐参数,采用高斯波束跟踪理论,计算传播损失;采用混响模型,计算混响;基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优布放深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;根据得到的待布放声呐的最优布放深度和记录的待布放声呐的初始位置,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。2.根据权利要求1所述的浅海动态环境下蛙人探测声呐部署优化方法,其特征在于,所述声呐工作海区的环境条件为水文情况,该水文情况具体表现为声呐工作海区海水的声速c;所述声呐参数包括:掠射角、声源级和检测阈。3.根据权利要求1所述的浅海动态环境下蛙人探测声呐部署优化方法,其特征在于,所述根据获取的声呐工作海区的环境条件,采用高斯波束跟踪理论,计算传播损失;根据获取的待布放声呐的声呐参数,采用混响公式,计算混响;其具体过程包括:假设声线声压u(s,n)表示为,u(s,n)=a(s)φ(s,n)e
jwτ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,a为沿声线方向的振幅;φ为垂直于声线中心方向的位移;s为沿声线方向的弧线;n为垂直于声线中心方向的位移;w为圆频率;τ为沿声线的传播时间;j为虚数;在预先建立的柱坐标系下,控制方程为,其中,r和z分别表示水平距离和深度;ζ和ξ为与掠射角有关的两个中间变量,c为声速;其中,θ为掠射角;高斯射线束的变化过程通过引入两个变量p和q来控制,如式(4)和(5)所示,
其中,c
nn
是声速在声线路径法线方向上的二阶导数;因此,利用φ和a表示为高斯声线宽度w的函数:其中,δα为临近声线的夹角;然后将声线声压u
i
(s,n)转化为柱坐标系下的声压u
i
(r,z),用携带能量的声线叠加得到最后的声场;采用非相干的计算方式,声压p
s
为:其中,z0为待布放声呐的入水深度,即待布放声呐的初始位置;c0为声源处的声速;采用高斯波束跟踪理论,计算传播损失tl:根据获取的待布放声呐的声呐参数,采用混响模型,计算混响rl:rl=sl-2tl ts
r
ꢀꢀꢀꢀ
(9)其中,sl为声源级,tl为传播损失,ts
r
为目标反射强度,其中,ts
r
由下式计算得到:其中,l
b
为距离分辨力,r为水平距离,θ为掠射角。4.根据权利要求3所述的浅海动态环境下蛙人探测声呐部署优化方法,其特征在于,所述基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;其具体过程包括:基于传播损失tl和混响rl,计算信号余量se(r,z
s
,z
g
):se(r,z
s
,z
g
)=sl-2tl(r,z
s
,z
g
) ts-nl(r,z
s
,z
g
)-dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)其中,r表示水平距离,z
s
表示声源深度,z
g
表示目标的深度,nl(r,z
s
,z
g
)为总噪声级;ts为目标强度;dt为检测阈;其中,
其中,an为环境噪声级,ag
n
为接收阵列的噪声增益,rl为混响;将探测概率与信号余量相关联,建立基于探测概率感知的声呐性能评估模型:其中,p
d
为探测概率;σ为该模型的标准差;根据上式(13),得到待布放声呐对声呐工作海区内每个栅格工作海区声呐处目标的实际环境下探测概率。5.根据权利要求4所述的浅海动态环境下蛙人探测声呐部署优化方法,其特征在于,所述采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优布放深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;其具体过程包括:初次筛选过程中,在目标海区全深度以δz
s
为间隔选取多个待布放声呐可能的布放深度,利用基于探测概率感知的声呐性能评估模型,计算所选取的各深度下的探测概率p
d
;以待布放声呐对已知目标位置处的探测概率最大为准则,将上述计算的各深度下的探测概率进行从大到小排序,选择最大探测概率对应的布放深度,以a为间隔选取待布放声呐可能的布放深度,作为次优布放深度区间:其中,z
s
为声源深度;r
g
为目标在距离方向上的位置;z
g
为目标在深度方向上的位置;针对得到的次优布放深度区间,计算每个待布放声呐可能的布放深度对应的评价函数值g:其中,为声呐的等效作用距离的均值,为声呐的等效作用距离的均值,为归一化后的等效作用距离,为声呐归一化后等效平均距离的标准差,m为次优深度布放区间被划分的个数;r为等效作用距离;α,β,δ为不同的加权系数,且有α β δ=1;再依据评价函数最小为准则进行第二次筛选,获取最小化评价函数值对应的可能的布放深度,将其作为待布放声呐的最优布放深度放深度,将其作为待布放声呐的最优布放深度6.一种浅海动态环境下蛙人探测声呐部署优化装置,其特征在于,该装置包括:传播损失与混响级获取模块,用于根据获取的声呐工作海区的环境条件,采用高斯波束跟踪理论,计算传播损失;根据获取的待布放声呐的声呐参数,采用混响公式,计算混响;探测概率获取模块,用于基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算声呐对特定区域内各处目标的实际环境下探测概率;和
部署优化模块,用于采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优布放深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;根据得到的待布放声呐的最优布放深度,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。7.一种声呐部署优化的计算机设备,其特征在于,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如权利要求1~5任一项所述的方法。8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行如权利要求1~5任一项所述的方法。9.一种信息数据处理终端,其特征在于,所述信息数据处理终端用于实现如权利要求1~5任一项所述的方法。
技术总结
本发明属于声呐部署优化和声呐性能优化技术领域,具体地说,涉及一种浅海动态环境下蛙人探测声呐部署优化方法,包括:在水平和深度方向分别以预设的步长进行栅格化;根据获取的声呐工作海区的环境条件和声呐参数,采用高斯波束跟踪理论,计算传播损失;采用混响模型,计算混响;建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度,再结合记录的待布放声呐的初始位置,调整待布放声呐的布放深度。调整待布放声呐的布放深度。调整待布放声呐的布放深度。
技术研发人员:杨娟 岳文蓉 许枫 李钟
受保护的技术使用者:中国科学院声学研究所
技术研发日:2022.01.28
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。