1.本发明涉及一种根据权利要求1的前序部分的移动式作业机。此外,本发明涉及一种采用移动式作业机的方法和对于移动式作业机的用途。
背景技术:
2.混凝土泵在现有技术中是已知的。这些混凝土泵通常有两个液压的输送缸。在此,两个输送缸之一的活塞界定了工作室,通过该工作室可从漏斗吸入混凝土。这是通过沿扩大工作室的方向移动活塞来进行的。两个输送缸的第二个活塞与第一个活塞的设定运动方向相反地移动,因此混凝土于是可以从工作室被引入到混凝土管线或输送管路中。输送缸的活塞在液压缸的范围内移动,其方式为,液压缸的活塞杆与活塞机械地连接。液压缸又由液压泵操控。输送缸的工作室的填充程度取决于待输送的混凝土,特别是其粘度。通常,工作室的填充程度高达80%。也就是说,当活塞已执行所需的吸入冲程时,例如80%的混凝土和0%的空气会被布置在工作室中。如果现在要通过在工作室缩小的方向上移动活塞来将混凝土推出工作室,则工作室中的空气首先被压缩。在这个阶段,活塞由于阻力相对较低而加速,并且在空气的压缩阶段之后撞击工作室中的混凝土柱。在此产生显著的压力增加或压力峰值。这不利地导致不希望的噪声。此外不利地产生振荡,该振荡例如在输送管路上可感觉到,并且可能导致其他组件的不希望的振荡。这可能会严重到对人员造成危险。
技术实现要素:
3.在这种背景下,本发明的目的是,提出一种移动式作业机或混凝土泵,其在装置技术方面简单且成本低廉地设计,并且消除了现有技术中提到的缺点。此外,本发明的目的是,为移动式作业机提出一种消除上述缺点的简单且廉价的方法。此外,将规定一种对于移动式作业机的有利用途。
4.关于移动式作业机的目的根据权利要求1的特征来实现,关于方法的目的根据权利要求14的特征来实现,并且关于用途的目的根据权利要求15的特征来实现。
5.本发明的有利改进是从属权利要求的主题。
6.权利要求1的解决方案是极其有利的,因为在第一调控模式中,以在装置技术方面极其简单的方式实现了液压机的柔和的或负载敏感的行为。如果例如在液压机出口侧的压力——例如由于消耗器的可能的压力峰值——升高,那么液压机的泵送机构通过流体机械的恢复力立即回摆,而没有额外的控制或调控。在出口侧的压力升高时,液压机在一定程度上屈服。由现有技术已知的、防止这种情况发生的机械反馈优选地在该液压机中未予规定。特别地,液压机因而以简单的方式避开了消耗器的压力峰值。如果在另外的第二循环段中例如以恒定速度移动消耗器,则有利地规定,液压机在摆动角调控中运行。因此,移动式作业机可以按廉价且简单的方式在所描述的两种调控模式中运行,这特别在作业机被设计为混凝土泵时是有利的,这将在下面更详细地解释。采用根据本发明的作业机,因此可以按简单的方式减少和避免在从消耗器的调节运动过渡到消耗器的动力冲程时的压力峰值。
7.换句话说,液压机在第一循环段中以调节压力予以先导控制。液压机于是对于在液压机出口侧的负载压力是负载敏感的。为此,液压机尤其可以具有流体机械的et调控器。该et调控器例如在文献rd 92004/2020-03-30, rexroth bosch group中公开。et调控器优选地在液压机的泵送机构和调节缸之间没有机械的反馈。
8.作业机经过优选设计,从而在工作循环期间可切换调控模式。例如设置控制机构,以便在工作循环期间切换调控模式。
9.所述至少一个消耗器例如是液压缸,该液压缸可通过液压机驱动,并且特别是通过机械连接的输送缸用于输送流体状的介质,例如混凝土。在液压缸的输送冲程期间,例如当输送混凝土时,通常首先进行调节运动以便压缩空气空间,并且然后进行动力冲程,以便输送混凝土质量。输送冲程例如从活塞的下死点开始进行。在调节运动和动力冲程之间的过渡区域内,对于传统的混凝土泵而言在撞击流体状的介质时会出现压力峰值。由于在第一循环段中的负载敏感的设计,采用在装置技术上简单的方式避免或有效地降低了该压力峰值。
10.至少一个液压缸优选地与输送缸连接,并驱动该输送缸。输送缸例如具有输送活塞。液压缸的活塞杆于是可以与输送缸的输送活塞连接,以便在伸出方向和缩回方向上移动该输送活塞。输送活塞可以界定输送室。输送室可以在输送活塞的伸出方向上变小,而反向地在缩回方向上扩大。在输送室减小时,于是可以将介质(例如混凝土)从输送室中挤出。在输送室扩大时,可以将介质引入到例如吸入到该输送室中。如果输送缸吸入了例如混凝土,则根据混凝土的粘度而定,输送室仅部分地被填充混凝土,例如直至80%。在其余部分中通常存在有空气。在输送冲程中,输送活塞因此在它撞击混凝土并将混凝土推出输送室之前,基本上首先移动通过输送室的空气部分。
11.在本发明的另一设计中,优选地设置了用于移调或操控液压机的调控器。该调控器例如具有至少一个阀。该阀的阀芯可以通过磁性执行器操作,以便以所期望的调节压力来移调液压机。优选地可以规定,在第一循环段中以特定的阀操作程度来操控阀的执行器,即例如产生特定的磁力来移调阀芯。阀操作程度例如可以对应于液压机的所期望的偏转或摆动,或者对应于液压机的特定的工作容积。因此优选地对阀进行恒定的操控,以便以期望的调节压力来移调液压机。基于在液压机出口侧的负载压力的、在泵送机构上的流体机械的恢复力与调节压力相反地作用,其中,泵送机构从特定的负载压力起通过流体机械的恢复力自动地沿工作容积减少的方向回摆。调控器例如是et调控器,它因此在第一循环段中简单地以流体机械方式运行。在提到的文献rd92004中介绍了et调控器的一种示范性的设计。
12.优选地,在第二循环段中,可以使用所述调控器,或者使用一种作为电子调控器的调控器。于是,该调控器可以根据液压机的摆动角的调控误差来调整或调控所述阀的阀操作程度,由此进行摆动角调控。调控器可以简单地为et调控器。
13.在本发明的另一设计中,如此进行摆动角调控,从而液压机使得实际摆动角尽可能精确地跟踪给定摆动角,而与负载压力无关。优选地设有摆动角传感器,通过该摆动角传感器可确定液压机的实际摆动角。替代地或附加地可设想,估计液压机的实际摆动角。这例如利用泵模型和/或测量参量负载压力和/或调节压力和/或阀操作程度和/或液压机转速来进行。
14.用于移调液压机的调控器优选地具有调节缸。该调节缸可以具有调节活塞,该调节活塞被设置用于使液压机摆动并且可被施加调节压力。调节活塞例如作用到液压机的摆动支架上。液压机的排量优选可以通过调控器无级地调节。液压机于是可以与作用的调节压力成比例地摆动。然而,摆动受到系统压力的影响,这根据本发明被用来在第一循环段中实现负载敏感性。优选地,在液压机和调控器之间不设置与调节活塞连接的返回杆。这种返回杆例如在hd-调控器中设计,其比如在上述文献rd-e 92004中公开。由于没有返回杆,可以按简单的方式在第一循环段中实现负载敏感性。液压机出口处的体积流量例如可以在0到100%的范围内无级地调节。作为用于调控器的阀,例如设置了减压阀。优选设计两个这样的减压阀。在这种情况下,调节缸可以具有两个与调节活塞分开的调节室,其中,相应的调节室与相应的减压阀流体连接。减压阀又分别布置在压力介质源和调节室之间。根据在减压阀的执行器或磁体上的预选的电流强度,液压机的调节缸按比例供应调节压力。用于相应的调节室的两个调节压力在此可相互独立地操控。液压机的在特定的控制电流下产生的泵排量在此取决于液压机的转速和工作压力。优选为每个减压阀分配穿流方向。
15.在本发明的另一设计中,可以规定第三循环段。在消耗器的工作循环的该第三循环段中,例如形成了一种调控模式,在该调控模式中,该液压机处于一种运行中,该运行通过在泵送机构处的流体机械的恢复力在液压机的出口侧引起压力限制。这种调控模式例如可以相应地如同第一循环段那样来设计,并且从而实现负载敏感性。这在输送缸的冲程运动结束时是有利的,特别是在输送室减小的方向上,以避免当输送活塞撞击缸底时的压力峰值。
16.在本发明的另一设计中,设置了至少两个可由液压机驱动的消耗器。这些消耗器优选地是相反地工作的两个液压缸。由此,一个液压缸可以缩回,而另一个则伸出。相应的液压缸优选地具有将第一工作室与第二工作室分开的活塞。在两个液压缸的情况下,相应的活塞可以通过活塞杆与输送缸的相应的输送活塞连接。因此,在两个液压缸的情况下,对于作业机而言可以有两个输送缸工作。由此例如可以同时地通过一个输送缸吸入混凝土,且通过另一个输送缸排出混凝土。
17.液压机可以优选地特别是在两个消耗器情况下摆动,并且因此可在两个输送方向上工作。由此,该液压机可以有两个工作接头,其中,将相应的消耗器或相应的液压缸连接到相应的工作接头上。液压缸在此以其工作室与相应的工作接头连接。液压缸的未连接到液压机上的工作室优选地流体地特别是通过摆动管路(schaukelleitung)来连接。液压机因此可以从液压缸之一的一个工作室抽吸压力介质,并且将其输送到液压缸的另一个工作室中,反之亦然,由此可使得这些液压缸相反地移动。
18.可以设想的是,只有一个液压缸连接到液压机的工作接头上。液压机于是可以具有油箱接头,以代替另一个工作接头。
19.在本发明的另一设计中,可以在输送缸的输送室减小的方向上将第一循环段在时间上设置在第二循环段之前。此外优选地,可以将第二循环段设置在第三循环段之前。有利地,可以将第一循环段设置在输送活塞的下述行程范围内,在该行程范围中,输送活塞与待输送的介质间隔开并且在伸出方向上移动。因此,第一循环段优选地设置在下述行程范围内,在所述行程范围内基本上空气被压缩。例如当在输送活塞和实际待输送的介质(例如混凝土)之间规定气体或空气时就是这种情况。替代地或附加地可以规定,第一循环段设置在
输送活塞的下述行程范围内,在该行程范围中,输送活塞撞击介质并且在伸出方向上移动。例如当输送活塞在其输送行程中撞击混凝土时就会出现这种情况。
20.可以想到的是,第二循环段设置在输送活塞的下述行程范围内,在该行程范围中,输送活塞与待输送的介质接触并且在伸出方向上移动。例如可以想到的是,在活塞撞击混凝土之后,规定第二循环段,以便以恒定的输送速度从输送室中排出混凝土。
21.有利的是,第三循环段设置在输送活塞的下述行程范围内,在该行程范围中,输送活塞接触缸底。
22.根据本发明,规定了一种利用根据前述方面中的一个或多个方面所述的移动式作业机的方法。在该方法中,作业机在消耗器的工作循环的第一循环段中以一种调控模式运行,在该调控模式中,该液压机处于一种运行中,该运行通过在泵送机构处的流体机械的恢复力在液压机的出口侧引起压力限制。在消耗器的工作循环的第二循环段中,作业机在该方法中以一种调控模式运行,在该调控模式中,液压机在摆动角调控中运行。
23.根据本发明,规定了根据前述方面中的一个或多个方面所述的移动式作业机作为混凝土泵的用途。
24.可以想到,在车辆或拖车中或在静止环境中使用混凝土泵。
25.公开了一种用于在移动式作业机中直接驱动液压消耗器的液压泵,其中,该消耗器尤其是混凝土泵的输送缸。为了避免在从消耗器的调节运动过渡到消耗器的动力冲程时出现压力峰值,泵以不同的调控模式运行。这些调控模式在工作循环中切换。在第一循环段中,泵利用特别是初始的先导压力进行先导控制,或者利用在第一循环段中具有特定的开口横截面的先导阀进行控制,并且对出口处的负载压力是负载敏感的。在第二循环段中,泵在摆动角调控中运行。
附图说明
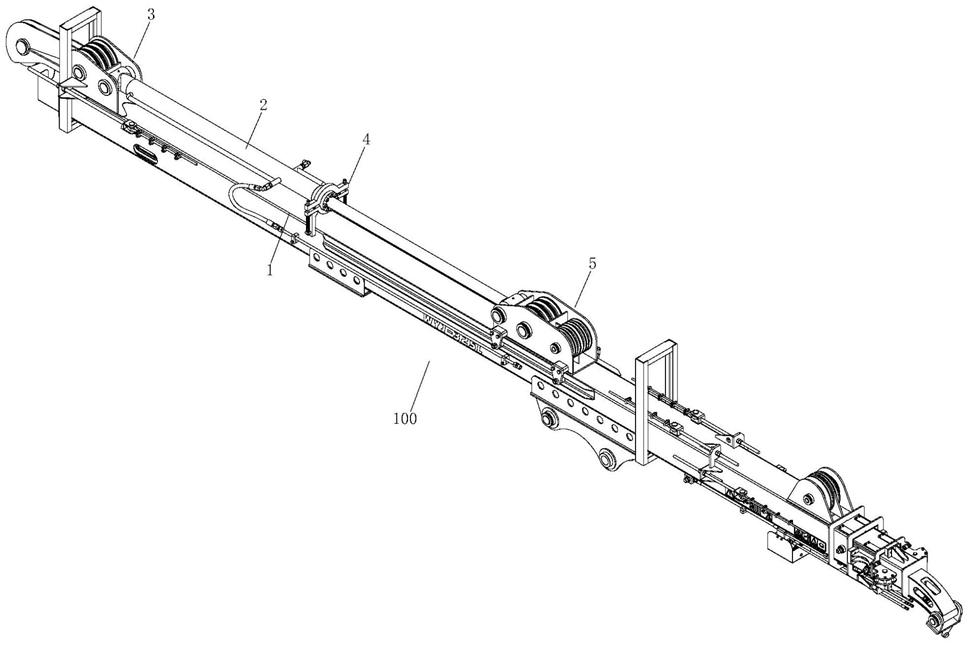
26.下面参照示意图更详细地解释本发明的优选的实施例。其中:图1示意性地示出了根据一个实施例的呈混凝土泵形式的移动式作业机;并且图2示出了在图1中的作业机的输送缸的工作行程期间负载压力的压力曲线。
具体实施方式
27.图1示出了混凝土泵1形式的移动式作业机,其具有第一和第二输送缸2、4。这些输送缸分别由液压缸6、8驱动。液压缸6、8通过液压泵10形式的液压机来操作。
28.相应的输送缸2、4具有输送活塞12、14,这些输送活塞分别限定了输送室16。相应的输送缸2、4可以在其输送室16中通过漏斗18接纳混凝土。这通过使得相应的输送活塞12、14在扩大输送室16的方向上移动来进行。如果相应的输送活塞12、14在输送室16的减小的方向上反向移动,则混凝土从输送室被输送到混凝土管线20或输送管路中。输送缸2、4在此相反地被驱动。也就是说,当一个输送活塞12沿输送室16减小的方向移动时,另一输送活塞14相应地沿其输送室16增大的方向移动,反之亦然。通过所谓的摆动管(s阀)——为了简单起见未示出——相应的输送缸2、4的混凝土接头可以交替地与漏斗18和混凝土管线20连接,这取决于它吸入混凝土还是挤出混凝土。代替混凝土,也可以通过输送缸2、4输送另一种流体状的或气态的介质,例如水。
29.液压缸6、8各有一个活塞22、24。这些活塞各自将第一工作室26与第二工作室28分开。第二工作室28通过流体管路30流体地连接。液压缸6的第一工作室26通过第一工作管路32与液压泵10的工作接头a连接。另一个液压缸8的第一工作室26通过工作管路34与液压泵10的另一个工作接头b连接。液压泵10连同液压缸6、8的在此形成闭合的液压回路。液压缸6和8的相应活塞22、24通过相应的活塞杆36与输送缸2和4的相应活塞12、14连接,以便移动它们。活塞杆36在此各自穿过液压缸6、8的第二工作室28。在液压缸6、8与输送缸2、4之间设置了用于分离污垢的水容器38。如果液压缸6的活塞22沿扩大其第一工作室26的方向移动,则液压泵10将压力介质从工作管路34输送到工作管路32中。同时,另一个液压缸8的活塞24沿减小其第一工作室26的方向移动,其方式为,液压泵10通过工作管路34获取压力介质并将其供应给液压缸6。由环形室形成的第二工作室28通过流体管路30简单地短路。
30.液压泵10通过传动轴40驱动,通过该传动轴还驱动先导泵42。其提供了压力介质,由此产生用于移调液压泵10的调节压力。液压泵10可摆动,从而可调节其输送量或工作容积。为了移调液压泵10,设置了带有调节活塞46的调节缸44。调节活塞46将两个调节室48和50彼此分开。该调节活塞还与液压泵10的泵送机构(pumpwerk)机械地连接,以便调节输送量。在相应的调节室48、50上连接着相应的减压阀52、54。这些减压阀又与先导泵42流体连接。因此,在需要时,压力介质可以从先导泵42通过相应的减压阀52、54流入相应的调节室48、50中。减压阀52、54可分别通过磁体56形式的执行器来操作。液压泵10的体积流量输出可在0到100%的范围内无级地调节。根据在减压阀52、54的磁体56上的预选的电流强度i,调节缸50被成比例地供给调节压力。这两种调节压力在此可相互独立地操控。在特定的控制电流的情况下产生的泵排量在此取决于液压泵10的转速和工作压力。
31.根据图1,混凝土泵1还具有连接在工作管路32、34之间的并用作冲洗-和供给压力阀的阀58或阀总成。此外,设有限压阀60,其限制在先导泵42的出口侧的压力。此外,通常设置两个高压限制阀62,它们限制在主泵出口侧的压力,并且附加地包含补吸功能。
32.根据图2,示意性地示出了输送缸2、4之一的工作循环的一部分。根据工作循环,关于时间t的压力曲线p根据图2示出。在左图a中示出了在已从漏斗18中接纳或吸入混凝土之后的输送缸2,参见图1。由于混凝土的粘性,输送室16的仅仅一部分填充有混凝土,在其余部分中存在的是空气。因此,在位于下死点的活塞12和待输送的混凝土之间,在输送室16中形成了空气空间。如果活塞12通过液压缸6沿输送室16减小的方向运动,参见图1,那么基本上空气被压缩和排挤。于是从特定的冲程起,活塞12撞击输送室16中的混凝土,这在附图2中的图b中示出。如果活塞12撞击混凝土16,则在现有技术中迄今为止产生压力峰值64,这在图2中在图表中示出。压力峰值64是来自现有技术的常规压力曲线66的一部分,为了比较而将其在图2中示出。如图c所示,活塞12然后将混凝土从输送室16输送出来,其中,这里的压力在现有技术中基本恒定。根据图d,当活塞12撞击液压缸2的缸底时,另一个压力峰值68出现在现有技术中。为了避免压力峰值64和68,现在针对图1的混凝土泵1规定,液压泵10在装置技术方面简单地以不同的调控模式运行。为此规定了第一循环段70,见图2。在该循环段中,活塞12根据图a和b从下死点沿混凝土的方向移动,并且然后在它已经挤出空气后撞击混凝土。在该第一循环段中,为液压泵10规定了一种调控模式,其中,该液压泵处于一种运行中,该运行通过在泵送机构处的流体机械的恢复力在液压泵10的出口侧引起压力限制。也就是说,在本实施例中,液压泵10最初通过对减压阀52、54的相应操作而如此摆动,使
得它把特定的输送量输入到液压缸6的第一工作室26中。减压阀52、54的磁体56因此以特定的阀操作程度而被操控,以便实现液压泵10的期望偏转,并因此实现液压机的特定的工作容积。液压泵10因此通过所期望的调节压力进行移调。如果输送缸2的活塞12现在撞击混凝土,参见附图2中的图2b,则液压泵10自动往回摆动。由于活塞12对混凝土的冲击,在液压泵10的泵送机构处产生相对高的流体机械的恢复力,该恢复力导致自动回摆,并因此在液压机的出口侧导致压力限制。液压泵10或变量泵因此用作负载敏感的泵。也没有设置防止液压泵10的负载敏感性的机械反馈。由于在第一调控模式中没有信号链起作用或不需要信号链,所以液压泵10立即摆回而没有时间延迟。液压泵因此立即避开压力峰值。在第一循环段70中,因此设置了具有负载敏感性的柔和的泵。这可通过图2的特性曲线72看出。还可以设想,该曲线在第一循环段中渐减地设计,参见附图标记74,或累进地设计,参见附图标记76。
33.根据图2,第一循环段70之后是第二循环段78,其中,为液压泵10规定了另一种调控模式。在此将摆动角调控设计为调控模式。这导致活塞12以恒定的速度从输送室16输送混凝土,见图c。
34.在图2中的第三循环段80中,然后再次采用第一循环段70的调控模式。如果然后根据图d活塞12撞击缸底,则液压泵10由于其负载敏感性而再次回摆。
35.对于图2的第二循环段78,规定了相应的控制机构82,参见图1,其带有相应的软件,特别是eep软件。通过在第二循环段78中的调控模式,因此确保连续的混凝土输送流。根据精度要求,可设想在可移调的液压泵10中设置摆动角传感器。由此可以形成一个闭合的调控回路。
36.根据图2,优选地在第一循环段70中规定了输送活塞12的加速——优选至少直到撞击混凝土——,在第二循环段78中规定了输送活塞12的恒定运动,并且在第三循环段80中规定了输送活塞12的减速。由于在第二循环段78中的调控模式,产生了生硬的泵送特性。相反,在第一和第三循环段70、80中,可以实现柔和的且负载敏感的泵送特性。生硬的泵送特性例如可以根据ep规则来设计,如其在提到的文献rd-e92004中举例说明的那样。
37.因此,通过根据本发明的混凝土泵1,产生了机械移调机构与电子智能的组合。在需要时,液压泵10可以通过没有机械反馈的et调控来实现负载敏感行为。此外,可以规定软件模块eep,其控制液压泵10,从而实现ep特性,即生硬的泵送特性。因此,可以利用特别是以可摆动的轴向柱塞机为形式的唯一的液压泵10来实现两种不同的行为。
38.为了避免图2中的压力峰值66、68,在现有技术中例如规定,减小控制电流,然而这不利地导致系统缓慢。还可以想到,液压地避免压力峰值,例如通过将调节腔减载,但这也导致系统缓慢和迟缓。
39.利用混凝土泵1实现,在输送缸2和4启动时,实现液压泵10的柔和的且负载敏感的行为。这一直进行到输送活塞12、14撞击混凝土面的点。如果达到该点,则设定所谓的生硬的泵送特性。这样就可以实现连续的输送流,并且不会因压力变化而出现输送波动。如果到达缸的端部,则可以在输送活塞12、14撞击缸底时避免在液压泵10的低压侧出现压力峰值和压力扰动。通过液压泵10的所选定的泵送行为,避免了这种临界状态。因此在该阶段也可以实现液压泵10的负载敏感的行为。
40.在本发明的另一设计中,可想到将相应的压力传感器连接到相应的工作管路32、34上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。