1.本发明主要涉及机械键盘领域,尤其指一种低待机功耗和高汇报率的高性能机械键盘驱动芯片和机械键盘。
背景技术:
2.对于传统的机械键盘,按键检测都采用动态矩阵扫描工作模式,按键检测m行n列的矩阵,为防止按键抖动带来的检测错误,每列检测时间超过200us,完成整个键盘扫描的时间n*200us,动态矩阵扫描工作模式限制了按键检测速度的提升,使机械键盘不能实现更高的汇报率;传统机械键盘由于采用动态矩阵扫描工作模式,在键盘进入待机模式后,为实现键盘唤醒,需要定时唤醒控制器,对键盘矩阵扫描,这导致键盘的待机功耗偏高,对于电池供电的键盘,将影响电池的寿命;为降低待机功耗只能降低待机时的检测频率,导致键盘唤醒慢,大大影响了键盘使用体验。
3.因此,有必要提供一种改进的机械键盘驱动芯片来克服上述缺陷。
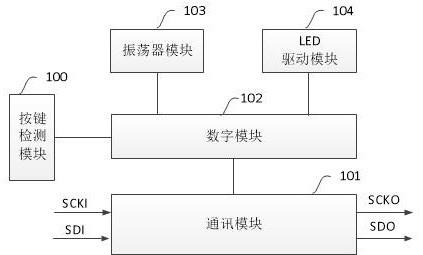
4.解决上述技术问题,本发明提出了一种高性能机械键盘驱动芯片,包括按键检测模块(100)、通讯模块(101)、数字模块(102)、振荡器模块(103)、led驱动模块(104);按键检测模块(100)对按键状态进行检测,将检测到的按键状态存储在数字模块(102);振荡器模块(103)为数字模块(102)提供时钟;led驱动模块(104)用于驱动灯效led;通讯模块(101)用于接收控制器发送的命令、数据,并将数字模块(102)存储的按键状态上传回控制器;待机模式下,芯片待机功耗小于0.1ua;在有按键操作时唤醒控制器;每一个按键对应独立的按键检测模块(100),按键检测速度快、准确度高,实现超过8khz的高汇报率;以上特征可以使该芯片应用到机械键盘领域,开发出具有超低的待机功耗和高汇报率的高端机械键盘。
技术实现要素:
5.本发明要主要解决的问题在于:针对现有技术存在的问题,本发明提供了一种高性能机械键盘驱动芯片和机械键盘,该驱动芯片具有极低的待机功耗,在待机模式下,通讯模块(101)不再采用菊花链移位方式,输出数据信号sdo等于输入数据信号sdi和按键检测状态的位运算,支持按键唤醒功能;每一个按键对应独立的按键检测模块(100),按键检测速度快、准确度高;使用本发明的机械键盘驱动芯片的机械键盘能够实现极低的待机功耗和超过8khz的汇报率。
6.为解决上述技术问题,本发明提出的解决方案为:包括按键检测模块(100)、通讯模块(101)、数字模块(102)、振荡器模块(103)、led驱动模块(104);按键检测模块(100)对按键状态进行检测,将检测到的按键状态存储在数字模块(102),按键检测模块(100)的输出连接到数字模块(102)的第一个输入端口;振荡器模块(103)为数字模块(102)提供时钟,振荡器模块(103)的输出连接到数字模块(102)的第二个输入端口;led驱动模块(104)用于驱动灯效led,led驱动模块(104)的输入连接到数字模块(102)的输出端口;通讯模块(101)用于接收控制器发送的命令、数据,并将数字模块(102)存储的按键状态上传回控制器,通
讯模块(101)连接到数字模块(102)的第三个输入端口,通讯模块(101)的输入时钟信号sck,输入数据信号sdi,输出数据信号sdo,输出数据信号sdo是输入数据信号sdi的移位输出。
7.上述的机械键盘驱动芯片,其特征在于,通讯模块(101)在正常工作模式下采用菊花链移位方式,输入时钟信号sck,输入数据信号sdi,输出数据信号sdo,输出数据信号sdo是输入数据信号sdi的移位输出。
8.上述的机械键盘驱动芯片,其特征在于,在待机模式下,通讯模块(101)不再采用菊花链移位方式,输出数据信号sdo等于输入数据信号sdi和按键检测状态的位运算。
9.上述的机械键盘驱动芯片,其特征在于,在待机模式下,通讯模块(101)不再采用菊花链移位方式,输入时钟信号sck作为机械键盘驱动芯片的唤醒信号。
10.上述的机械键盘驱动芯片,其特征在于,按键检测模块(100)为解决机械按键抖动问题,采用带迟滞的检测结构,通过通讯模块(101)可以配置按键检测的毛刺过滤时间和去抖时间。
11.一种机械键盘,其特征在于:包含主控制器,一个或多个机械按键,一个或多个上述的机械键盘驱动芯片。
12.上述的机械键盘,其特征在于:机械键盘驱动芯片可以分布在一条扫描链上,也可以分布在多条扫描链上。
13.上述的机械键盘,其特征在于:每个机械键盘驱动芯片可以驱动一个或多个机械按键。
14.上述的机械键盘,其特征在于:每个机械键盘驱动芯片可以驱动零个或多个led。
15.与现有技术相比,本发明的优点在于:1、具有极低的待机功耗,传统的机械键盘在键盘进入待机模式后,为实现键盘唤醒,需要定时唤醒控制器,对键盘矩阵扫描,限制了键盘的待机功耗;本发明每一个按键对应独立的按键检测模块(100),无需定期扫描,待机模式下芯片静态功耗小于0.1ua。
16.2、具有极高的唤醒速度,传统机械键盘为降低待机功耗,只能降低待机功耗,只能降低待机时的扫描频率,这导致唤醒速度慢;本发明每一个按键对应独立的按键检测模块(100),无需定期扫描,在待机模式下,通讯模块(101)不再采用菊花链移位方式,输出数据信号sdo等于输入数据信号sdi和按键检测状态的位运算,实时唤醒控制器,具有极高的唤醒速度。
17.3、具有极高的汇报率。传统机械键盘按键检测都采用动态矩阵扫描工作模式,动态矩阵扫描工作模式限制了按键检测速度的提升;本发明每一个按键对应独立的按键检测模块(100),无需定期扫描,检测速度快、准确度高,实现超过8khz的高汇报率。
附图说明
18.图1是本发明的高性能机械键盘驱动芯片结构示意图;图2是本发明的按键检测高跳变时序图;图3是本发明的按键检测低跳变时序图;图4是本发明机械键盘的原理示意图。
具体实施方式
19.以下将结合附图和具体实施例对本发明做进一步详细说明。
20.请参阅图1所示,本发明的一种高性能的机械键盘驱动芯片,其特征在于:包括按键检测模块(100)、通讯模块(101)、数字模块(102)、振荡器模块(103)、led驱动模块(104);按键检测模块(100)对按键状态进行检测,将检测到的按键状态存储在数字模块(102),按键检测模块(100)的输出连接到数字模块(102)的第一个输入端口;振荡器模块(103)为数字模块(102)提供时钟,振荡器模块(103)的输出连接到数字模块(102)的第二个输入端口;led驱动模块(104)用于驱动灯效led,led驱动模块(104)的输入连接到数字模块(102)的输出端口;通讯模块(101)用于接收控制器发送的命令、数据,并将数字模块(102)存储的按键状态上传回控制器,通讯模块(101)连接到数字模块(102)的第三个输入端口,通讯模块(101)的输入时钟信号sck,输入数据信号sdi,输出数据信号sdo,输出数据信号sdo是输入数据信号sdi的移位输出。
21.图2是本发明的按键检测高跳变时序图,以检测按键信号的高跳变为例,sw为按键输入信号,在sw高跳变时,由于机械按键的结构问题,sw存在持续时间为t3的抖动,为滤除sw按键抖动,本发明采用的方案为:按键检测模块(100)检测到一个上升沿后,如果高电平持续时间大于毛刺过滤时间t1,则认为是一次按键操作,按键检测模块(100)的输出sw_out信号输出高,但此时按键的抖动尚未结束,因为人为的按键操作每秒钟小于20次,因此在sw_out输出为高之后的去抖时间t2内,按键检测模块(100)不再检测sw输入信号,sw_out保持高电平输出,只要去抖时间t2时间小于50ms,将不会影响该按键的输出准确性,该方案按键检测速度快,从按键输入信号sw变化到按键检测模块(100)输出sw_out信号响应延时为毛刺过滤时间t1,毛刺过滤时间t1典型为50us;很容易根据按键信号的高跳变得到按键检测低跳变时序图,见图3;为适应不同的按键特性和机械键盘需求,毛刺过滤时间t1、去抖时间t2可以通过通讯模块(101)灵活配置。
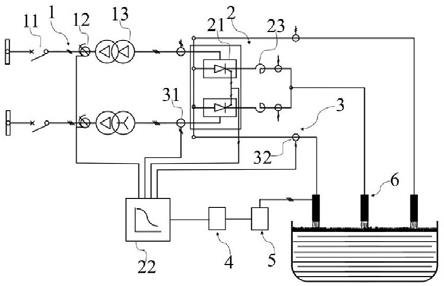
22.本发明的机械键盘驱动芯片在待机模式下,通讯模块(101)不再工作于菊花链移位方式,输出数据信号sdo等于输入数据信号sdi和按键检测状态的位运算;以机械键盘按键操作时按键输入信号sw为高电平为例,在待机模式下sdo=sdi或sw;图4为本发明机械键盘的原理示意图,n个机械键盘驱动芯片串联,控制器的sdo连接到芯片一的sdi,控制器的sck连接到每一个芯片的sck,控制器的sdi连接到芯片n的sdo,相邻芯片的sdi、sdo首尾相连;在进入待机模式后进入控制器的信号sdon表达式为:sdon=sdi|sw1|sw2|
…
|sw
n-1
|swn待机模式下,主控制器的sdo输出0,则sdi为0,有任意个按键被按下时,sw信号变为高,sdon由低电平变为高电平,唤醒控制器;控制器被唤醒后,sck信号翻转,唤醒所有的机械键盘驱动芯片,机械键盘进入正常工作模式。
23.使用上述技术机械键盘驱动芯片的机械键盘,能有效降低待机功耗,提高键盘唤醒的速度,提高键盘的按键检测速度和准确度,提高应用方案和产品的竞争力。
24.以上各模块的示意图和实现是指具有该功能的所有实现方案。以上各图所示的电路仅为示例,将器件简单地替换所引起的电路变化亦属于本发明的保护范围,本发明的保护范围应以权力要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。