1.本发明涉及空气净化器领域,特别涉及一种自主巡航式智能空气净化器。
背景技术:
2.空气净化是指针对室内的各种空气污染问题提供吸附、过滤、杀菌消毒、更换空气等解决方案,可以提高改善居家、办公条件。国内空气净化器以固定式空气净化器为主流,移动不便导致净化范围有限,不能把固定式净化器精确放到需要净化的地方,且固定式净化器只能净化周围有限区域,如果大范围高效净化,需要摆放多个净化器;此外,现有的空气净化器的净化模式单一,无法根据空气质量情况调整净化方式,因此无法对空气达到高效的净化。
技术实现要素:
3.本发明的目的在于,提供一种自主巡航式智能空气净化器。本发明方便移动,增加了空气净化的范围,且可根据空气污染情况改变净化模式,提高了空气净化的效率。
4.本发明的技术方案:一种自主巡航式智能空气净化器,包括从下至上依次设置的底壳、控制层、连接层、进风罩和顶壳,所述底壳上设有两个驱动电机,驱动电机的输出端设有驱动轮,底壳上还设有可拆卸清洁层,可拆卸清洁层上设有吸扫口,吸扫口内设有清扫滚筒刷,清扫滚筒刷的一侧经过u形传动结构连接有滚刷控制电机,可拆卸清洁层于吸扫口一侧设有清洁盒,清洁盒一侧的开口设置在吸扫口侧旁,清洁盒另一侧设有条形吸风口与吸尘装置相连,可拆卸清洁层于吸尘装置的一端开有通风口,底壳于前侧设有防撞条,防撞条与多组碰撞传感器相连,防撞条一侧设有锂电池;所述控制层中心设有管道,控制层的外侧设有深度相机,控制层的内侧设有jetson nano开发板;所述连接层中心设有集尘口,集尘口周围设有清扫块、紫外杀菌装置和离子发生装置,连接层上经中心卡槽连接多功能滤芯,多功能滤芯内设有鼓风机,鼓风机上侧连接有导流结构,进风罩套设于连接层外部;所述顶壳设置于进风罩的上方,且导流结构内置于顶壳之中,顶壳四周嵌有三组空气质量检测装置,顶壳上侧设有出风口与激光雷达。
5.上述的自主巡航式智能空气净化器中,所述导流结构顶壁设有工业级电容电阻触控屏。
6.前述的自主巡航式智能空气净化器中,所述底壳底部设有万向轮与两组辅助轮,在底部前端设有多组下视传感器。
7.前述的自主巡航式智能空气净化器中,所述多功能滤芯包括初效滤网、抗菌滤网、hepa滤网、活性炭滤网以及冷触媒滤网。
8.前述的自主巡航式智能空气净化器中,所述顶壳上设有三组空气质量检测装置且互相成120
°
分布。
9.前述的自主巡航式智能空气净化器中,所述鼓风机、导流结构以及多功能滤芯可从顶壳顶部抽出。
10.与现有技术相比,本发明具有以下有益效果:
11.1、本发明在底壳上设有两个驱动电机,驱动电机的输出端设有驱动轮,底壳于前侧设有防撞条,防撞条与多组碰撞传感器相连,控制层中心设有管道,控制层的外侧设有深度相机,控制层的内侧设有jetson nano开发板,本体在移动时,驱动电机工作,通过控制驱动轮带动装置移动,通过控制两个电机的转速来实现转向的功能,运动中,通过深度相机、防撞条、碰撞传感器进行避障,深度相机采集前方的图像,并对图像进行处理,若检测到前方有障碍物,净化器将会绕过障碍物,当遇到突然闯入的障碍物或者是障碍物在相机的盲区,如果净化器在某一方向发生碰撞,防撞条会减缓冲击力,且相应方向的碰撞传感器输出底电平触发jetson nano开发板的外部中断,净化器将后退并旋转一定角度再前进,并在地图相应位置标记该障碍物,如果再次运动到该位置仍发生碰撞,则确定该地方有障碍物,如果没有发生碰撞,则清除障碍物标记,解决了当前固定式空气净化器不能精确摆放到需要净化的地方、净化范围有限、净化效率低下的问题。
12.2、本发明在连接层中心设有集尘口,集尘口周围设有清扫块、紫外杀菌装置和离子发生装置,连接层上经中心卡槽连接多功能滤芯,多功能滤芯内设有鼓风机,鼓风机上侧连接有导流结构,进风罩套设于连接层外部,顶壳设置于进风罩的上方,本发明通过空气质量检测装置检测的空气质量数据,jetson nano开发板通过智能无扰的模糊控制算法自动调整鼓风机的功率以及鼓风机、紫外杀菌装置、离子发生装置的开启时间,使得本发明具有两种净化模式,即不开启鼓风机、紫外杀菌装置、离子发生装置为被动式净化模式,开启鼓风机、紫外杀菌装置、离子发生装置为主被动结合的净化模式,实现净化效果和能效的兼顾。
13.3、本发明在顶壳四周嵌有三组空气质量检测装置,顶壳上侧设有出风口与激光雷达,通过激光雷达与空气质量检测装置协同工作,生成动态空气质量分布地图,基于空气质量动态分布地图,净化器将进行路径规划,优先对空气质量较差的区域进行净化。
14.4、本发明在底壳上设有可拆卸清洁层,可拆卸清洁层上设有吸扫口,吸扫口内设有清扫滚筒刷,清扫滚筒刷的一侧经过u形传动结构连接有滚刷控制电机,可拆卸清洁层于吸扫口一侧设有清洁盒,清洁盒一侧的开口设置在吸扫口侧旁,清洁盒另一侧设有条形吸风口与吸尘装置相连,可拆卸清洁层于吸尘装置的一端开有通风口,通过滚刷控制电机驱动清扫滚筒刷,结合吸尘装置,可将地面垃圾扫至清洁盒,使得本发明同时具有清扫地面的功能。
附图说明
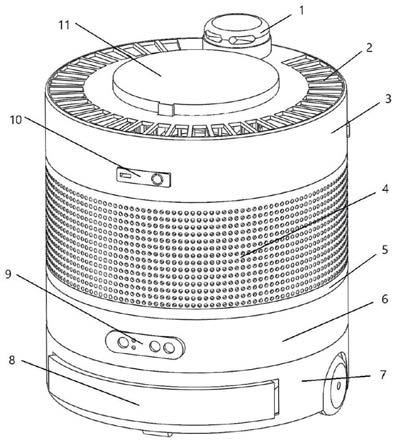
15.图1是本发明的自主巡航式智能空气净化器结构示意图;
16.图2是本发明的爆炸结构示意图;
17.图3是本发明的净化结构爆炸结构示意图;
18.图4是本发明的控制模块爆炸结构示意图;
19.图5是本发明的巡航清扫内部爆炸结构示意图;
20.图6是本发明的巡航清扫底部结构示意图。
21.附图中的标记为:1-激光雷达、2-出风口、3-顶壳、4-进风罩、5-连接层、6-控制层、7-底壳、8-防撞条、9-深度相机、10-空气质量检测装置、11-工业级电容电阻触控屏、12-导
流结构、13-鼓风机、14-多功能滤芯、15-集尘口、16-清扫块、17-紫外杀菌装置、18-离子发生装置、19-管道、20-jetson nano开发板、21-驱动电机、22-滚刷控制电机、23-清洁盒、24-通风口、25-吸尘装置、26-可拆卸清洁层、27-清扫滚筒刷、28-锂电池、29-碰撞传感器、30-驱动轮、31-辅助轮、32-吸扫口、33-下视传感器、34-万向轮。
具体实施方式
22.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
23.实施例:自主巡航式智能空气净化器,如附图1-2所示,包括从下至上依次设置的底壳7、控制层6、连接层5、进风罩4和顶壳3,如图5-6所示,所述底壳7上设有两个驱动电机21,驱动电机21的输出端设有驱动轮30,底壳7底部设有万向轮34与两组辅助轮31,在底部前端设有多组下视传感器33,其中,万向轮用于辅助转向,辅助轮用于防止装置倾倒。底壳7上还设有可拆卸清洁层26,可拆卸清洁层26上设有吸扫口32,吸扫口32内设有清扫滚筒刷27,清扫滚筒刷27的一侧经过u形传动结构连接有滚刷控制电机22,可拆卸清洁层26于吸扫口32一侧设有清洁盒23,清洁盒23一侧的开口设置在吸扫口32侧旁,清洁盒23另一侧设有条形吸风口与吸尘装置25相连,可拆卸清洁层26于吸尘装置25的一端开有通风口24,可拆卸清洁层26可向后拉出用于清洗清洁盒23与更换清扫滚筒刷27。底壳7于前侧设有防撞条8,防撞条8与多组碰撞传感器29相连,防撞条8一侧设有锂电池28,解决了当前固定式空气净化器不能精确摆放到需要净化的地方、净化范围有限、净化效率低下的问题。如图4所示,所述控制层6中心设有管道19,控制层6的外侧设有深度相机9,控制层6的内侧设有jetson nano开发板20。如图3所示,所述连接层5中心设有集尘口15,集尘口15周围设有清扫块16、紫外杀菌装置17和离子发生装置18,连接层5上经中心卡槽连接多功能滤芯14,多功能滤芯14包括初效滤网、抗菌滤网、hepa滤网、活性炭滤网以及冷触媒滤网,多功能滤芯14内设有鼓风机13,鼓风机13上侧连接有导流结构12,鼓风机13、导流结构12以及多功能滤芯14可从顶壳3顶部抽出用于清洁风道或更换多功能滤芯14。导流结构12顶壁设有工业级电容电阻触控屏11,方便将地图与空气质量状况显示在工业级电容电阻触控屏11上,如果用户想要指定净化区域,也可以通过工业级电容电阻触控屏11或者手机app制定净化方案。进风罩4套设于连接层5外部。所述顶壳3设置于进风罩4的上方,且导流结构12内置于顶壳3之中,顶壳3四周嵌有三组空气质量检测装置10,三组空气质量检测装置10且互相成120
°
分布,顶壳3上侧设有出风口2与激光雷达1,通过激光雷达1与空气质量检测装置10协同工作,生成动态空气质量分布地图。
24.工作原理
25.本发明是由jetson nano开发板20同时读取激光雷达1检测到的周围物理环境状况以及空气质量检测装置10检测到的周围空气环境状况,并生成动态空气质量分布地图并在工业级电容电阻触控屏11上显示。激光雷达1以及三个空气质量检测装置10与jetson nano开发板20通过并口相连,将检测到的数据通过并口发送给jetson nano开发板20,jetson nano开发板20再将数据发送给工业级电容电阻触控屏11。jetson nano开发板20的外部中断,设置为下降沿中断。jetson nano开发板20读取并处理激光雷达1以及三个空气质量检测装置10的数据,生成动态空气质量分布地图,并根据生成的动态空气质量分布地
图制定最短、最优的运动路线,通过激光雷达1可将客房划分为4个区域并进行编号,其次结合空气质量检测装置10检测的空气质量数据,将其依次存放到对应编号的区域的数组中,再通过遍历算法遍历各个数组,通过哈希算法对不同区域的空气质量进行排序,净化器将根据生成的排序结果依次净化对应的区域,同时标定污染较重的区域,在之后的巡航过程中将对该区域进行重点净化。其中,若用户想要指定净化区域,也可以通过工业级电容电阻触控屏11或者手机app制定净化方案,即将净化顺序数组替换为用户指定的顺序。净化器运动在规划目的地途中,如果空气质量检测装置10检测到周围污染物浓度较高,将会触发jetson nano开发板20的外部中断,使净化器原地停留净化并重新制定净化方案。
26.本体在移动时,驱动电机21工作,通过控制驱动轮30带动装置移动,通过设置不同的占空比来控制两个电机的转速来实现转向的功能,其中,万向轮用于辅助转向,辅助轮用于防止装置倾倒。运动中,通过深度相机9、防撞条8、碰撞传感器29进行避障。深度相机9采集前方的图像,并对图像进行处理,若检测到前方有障碍物,净化器将会绕过障碍物。当遇到突然闯入的障碍物或者是障碍物在相机的盲区,如果净化器在某一方向发生碰撞,防撞条8会减缓冲击力,且相应方向的碰撞传感器29输出底电平触发jetson nano开发板20的外部中断,净化器将后退并旋转一定角度再前进,并在地图相应位置标记该障碍物,如果再次运动到该位置仍发生碰撞,则确定该地方有障碍物,如果没有发生碰撞,则清除障碍物标记。移动的同时可以选择是否启动吸尘装置25、滚刷控制电机22控制清扫滚筒刷27进行地面吸扫操作。
27.净化有两种净化模式,一种是单纯的被动式净化模式(不开启鼓风机13、紫外杀菌装置17、离子发生装置18),一种是主被动结合的净化模式(开启鼓风机13、紫外杀菌装置17、离子发生装置18)。通过空气质量检测装置10检测的空气质量数据,jetson nano开发板20通过智能无扰的模糊控制算法自动调整鼓风机13的功率以及鼓风机13、紫外杀菌装置17、离子发生装置18的开启时间,实现效果能效的兼顾。主被动协同净化时,空气从进风罩4被吸入,然后经过多功能滤芯14,进行初次过滤,再经过紫外杀菌装置17、离子发生装置18沉积,清扫块16将被动吸附以及主动净化造成的沉降灰尘清扫至集尘口15,再经过管道19收集至清洁盒23中,同时鼓风机13将洁净的空气通过导流结构12从出风口吹出。
28.此外,当净化器在驶往净化区域的途中检测到周围的空气质量超过阈值,jetson nano开发板20将控制净化器停止在原地,并开启主被动协同净化,并更新该位置的空气质量地图重新制定净化方案,直至该位置的空气质量数据低于阈值,净化器根据新制定的方案开始净化。
29.当用户想要清洗清洁盒23或者更换清扫滚筒刷27,可以将可拆卸清洁层26向后拉出进行清洗、更换。若用户需要更换多功能滤芯14,可以将工业级电容电阻触控屏11、导流结构12、鼓风机13从顶壳3上部抽出进行更换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
