1.本发明涉及一种训练装置,尤其涉及一种骨伤科术后康复训练装置。
背景技术:
2.随着人们生活水平的提高,越来越多的人开始接触到速降、滑板和极限单车等极限运动,这类运动虽然能够给人们带来非同寻常的刺激体验,但是也特别容易造成身体上的骨折挫伤,特别是腿脚部位的膝盖和脚腕处。在患者腿部骨骼处受到较大的伤害并进行手术治疗后,通过后期的康复训练还有希望能够重新正常行走,因此我们经常能够在医院中看见陪护人员搀扶着病人进行康复训练,这对陪护人员和患者都具有较大耐心考验,但是,该方法需要患者使用较多的体力用在站立上,这会使得训练的效率非常的低下,很多患者因此而产生消极情绪,从而导致康复的速度慢、训练效果低。
3.根据专利授权公开号为的cn109730898b的一种临床肢体康复装置,包括底座,所述底座的上端设有座椅,所述座椅的上端设有l型杆,所述l型杆的下端连接有锻炼装置,所述第一电机的输出轴连接有长杆,所述支撑杆的上端设有弧形块,所述弧形块的上端开设有凹槽,所述弧形块的侧壁上开设有与凹槽接通的弧形槽,所述凹槽的上端插接有固定板,所述固定板的下端设有与弧形槽匹配的支撑轴,所述支撑轴与长杆匹配,所述固定板的上端设有魔术贴,所述固定板的侧壁上设有与座椅连接的弹簧,该临床肢体康复装置通过启动第一电机带动长杆转动,长杆通过支撑轴带动固定板在凹槽内移动,使得固定板带动腿部进行弧形移动,从而进行康复训练,这种方法患者主动训练的操作较少,容易造成依赖,并且长时间持续一种训练方式也不能够达到很好地训练效果。
4.根据上述现有技术中所存在的缺点,特此设计出能够克服现有技术缺点的一种能够使患者主动并且循序渐进地进行康复训练,训练效果好的骨伤科术后康复训练装置。
技术实现要素:
5.本发明为了克服上述现有技术中,患者主动训练的操作较少,容易造成依赖,并且长时间持续一种训练方式也不能够达到很好地训练效果的缺点,本发明要解决的技术问题是提供一种能够使患者主动并且循序渐进地进行康复训练,训练效果好的骨伤科术后康复训练装置。
6.为了解决上述技术问题,本发明提供了这样一种骨伤科术后康复训练装置,包括有支撑架、万向轮、转轴、滚轮、坐垫、背垫、扶手、握把、腿垫、锻炼机构和调节机构,支撑架底部右侧前后对称式设有万向轮,支撑架左部转动式贯穿有转轴,转轴前后两端对称式套设有滚轮,支撑架中部和上部分别连接有用于乘坐的坐垫和用于靠背的背垫,支撑架中部连接有围绕于坐垫前后两侧的扶手,坐垫顶部右侧前后对称式设有握把,支撑架右下部连接有腿垫,扶手上设置有用于腿部训练的锻炼机构,锻炼机构上设置有用于调节训练难度的调节机构。
7.优选地,锻炼机构包括有支杆、导轨、转杆、放置板和固定绳,扶手右侧连接有支
杆,支杆右部连接有导轨,导轨右部转动式设有转杆,转杆下侧连接有用于支撑患者腿部的放置板,放置板上侧连接有用于稳定患者脚部的固定绳。
8.优选地,调节机构包括有安装框、第一导杆、第一弹簧、滑动块、第一拉绳、第一导套、配重块和调节杆,支撑架下部前后两侧对称式设有安装框,安装框下部内侧连接有用于导向的第一导杆,第一导杆上滑动式贯穿有滑动块,滑动块与安装框之间连接有绕设在第一导杆外侧的第一弹簧,滑动块左部滑动式套设有七块呈左右设置的配重块,最右方配重块与滑动块之间滑动式贯穿有调节杆,安装框右侧连接有第一导套,转杆与滑动块之间连接有滑动式贯穿于第一导套的第一拉绳。
9.优选地,还包括有用于稳定患者腿部的夹紧机构,夹紧机构包括有安装板、第一固定垫、第二固定垫、滑动垫、第二导杆和第二弹簧,两根转杆相向的一侧上对称式设有安装板,两块安装板相向的一侧上对称式设有第一固定垫,安装板右部内侧连接有第二固定垫,两块安装板相离的一侧上对称地滑动式贯穿有第二导杆,第二导杆与安装板之间连接有第二弹簧,两根第二导杆相向的一侧上连接有用于腿部防护的滑动垫。
10.优选地,还包括有用于辅助夹紧机构的卡住机构,卡住机构包括有第一支板、第三导杆、第三弹簧和楔形块,支撑架右下部前后两侧对称式设有第一支板,第一支板上滑动式贯穿有两根第三导杆,两根第三导杆右部之间连接有与第二导杆接触的楔形块,楔形块与第一支板之间连接有绕设在相近第三导杆外侧的第三弹簧。
11.优选地,还包括有用于卡住万向轮的制动机构,制动机构包括有橡胶套、第二支板、制动板、第四导杆、第四弹簧、第三支板、第五导杆和第五弹簧,转轴中部套设有橡胶套,坐垫底部左侧前后对称式设有第二支板,第二支板左部转动式设有与橡胶套接触的制动板,第二支板上连接有与制动板滑动式配合的第四导杆,制动板与第二支板之间连接有绕设在第四导杆外侧的第四弹簧,支撑架下部左侧连接有第三支板,第三支板上从上往下依次滑动式贯穿有四根第五导杆,上方两根第五导杆的左侧之间和下方两根第五导杆的右侧之间均连接有与相近制动板接触的卡块,卡块与第三支板之间连接有绕设在第五导杆外侧的第五弹簧。
12.优选地,还包括有用于辅助制动机构的脱扣机构,脱扣机构包括有第二导套、第二拉绳和连接轴,支撑架下左部前后两侧均连接有用于导向的第二导套,从上往下数第一根第五导杆右侧和第三根第五导杆左侧均连接有滑动式贯穿于相近第二导套的第二拉绳,两根第二拉绳尾端之间连接有连接轴。
13.优选地,背垫的材质为橡胶材质。
14.本发明在克服现有技术缺点的基础上,还能够达到的有益效果有:
15.1、患者乘坐在坐垫上,通过背垫和扶手能够在患者累了时进行休息,在进行康复训练时,脚部发力通过固定绳带动放置板移动,以此能够主动地进行康复训练,并且通过配重块的增加,能够循序渐进地进行康复训练,以此达到更好地训练效果。
16.2、通过第一固定垫、第二固定垫和滑动垫能够防护住患者的腿部,同时也能够提高患者腿部的舒适度。
17.3、第二导杆在第二弹簧复位的作用下带动滑动垫夹住患者的腿部,以此能够使患者的腿部更加稳定。
18.4、在无需移动患者时,通过制动板将橡胶套卡住,增大橡胶套的摩擦力,滚轮此时
较难移动,以此能够达到刹车的效果。
19.5、操作人使用脚部向下踩动连接轴,卡块随之松开制动板,以此能够使制动板在第四弹簧复位的作用下快速地将橡胶套松开。
附图说明
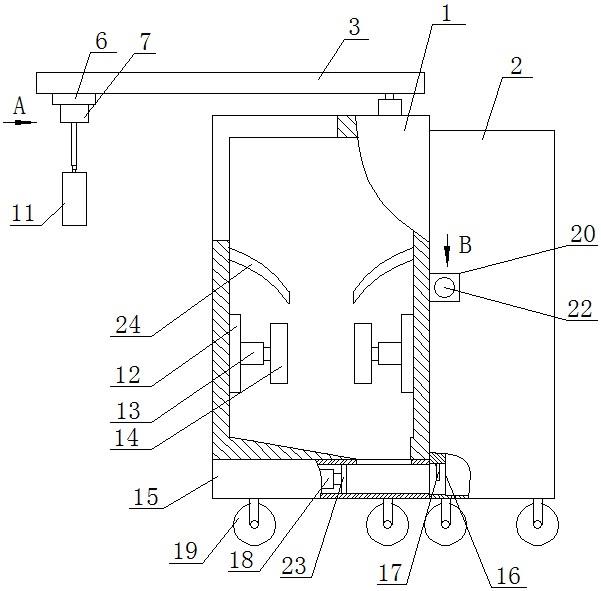
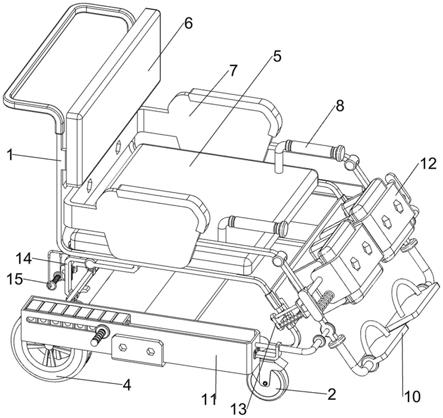
20.图1为本发明的立体结构示意图。
21.图2为本发明的部分立体结构示意图。
22.图3为本发明锻炼机构的立体结构示意图。
23.图4为本发明调节机构的立体结构示意图。
24.图5为本发明调节机构的爆炸图。
25.图6为本发明夹紧机构的立体结构示意图。
26.图7为本发明夹紧机构的部分零件图。
27.图8为本发明卡住机构的立体结构示意图。
28.图9为本发明卡住机构的部分立体结构示意图。
29.图10为本发明制动机构的立体结构示意图。
30.图11为本发明脱扣机构的立体结构示意图。
31.附图中的标记为:1-支撑架,2-万向轮,3-转轴,4-滚轮,5-坐垫,6-背垫,7-扶手,8-握把,9-腿垫,10-锻炼机构,101-支杆,102-导轨,103-转杆,104-放置板,105-固定绳,11-调节机构,111-安装框,112-第一导杆,113-第一弹簧,114-滑动块,115-第一拉绳,116-第一导套,117-配重块,118-调节杆,12-夹紧机构,121-安装板,122-第一固定垫,123-第二固定垫,124-滑动垫,125-第二导杆,126-第二弹簧,13-卡住机构,131-第一支板,132-第三导杆,133-第三弹簧,134-楔形块,14-制动机构,141-橡胶套,142-第二支板,143-制动板,144-第四导杆,145-第四弹簧,146-第三支板,147-第五导杆,148-第五弹簧,15-脱扣机构,151-第二导套,152-第二拉绳,153-连接轴。
具体实施方式
32.下面结合附图和实施例对本发明作进一步的说明。
33.实施例1
34.一种骨伤科术后康复训练装置,如图1-5所示,包括有支撑架1、万向轮2、转轴3、滚轮4、坐垫5、背垫6、扶手7、握把8、腿垫9、锻炼机构10和调节机构11,支撑架1底部右侧前后对称式设有万向轮2,支撑架1左部转动式贯穿有转轴3,转轴3前后两端对称式套设有滚轮4,支撑架1中部和上部分别栓接有坐垫5和背垫6,背垫6的材质为橡胶材质,能够使患者更加轻松,支撑架1中部栓接有围绕于坐垫5前后两侧的扶手7,坐垫5顶部右侧前后对称式栓接有握把8,支撑架1右下部栓接有腿垫9,扶手7上设置有锻炼机构10,锻炼机构10上设置有调节机构11。
35.如图3所示,锻炼机构10包括有支杆101、导轨102、转杆103、放置板104和固定绳105,扶手7右侧焊接有支杆101,支杆101右部焊接有导轨102,导轨102右部转动式设有转杆103,转杆103下侧栓接有放置板104,放置板104上侧连接有固定绳105。
36.如图4和图5所示,调节机构11包括有安装框111、第一导杆112、第一弹簧113、滑动
块114、第一拉绳115、第一导套116、配重块117和调节杆118,支撑架1下部前后两侧对称式焊接有安装框111,安装框111下部内侧栓接有第一导杆112,第一导杆112上滑动式贯穿有滑动块114,滑动块114与安装框111之间连接有绕设在第一导杆112外侧的第一弹簧113,滑动块114左部滑动式套设有七块呈左右设置的配重块117,最右方配重块117与滑动块114之间滑动式贯穿有调节杆118,安装框111右侧栓接有第一导套116,转杆103与滑动块114之间连接有滑动式贯穿于第一导套116的第一拉绳115。
37.首先,在患者需要进行康复训练时,操作人将患者搀扶至坐垫5上,患者背部能够靠在背垫6上,手部支撑在扶手7上,腿部贴在腿垫9上,脚部踩着放置板104并穿过固定绳105,操作人推动支撑架1,通过万向轮2和滚轮4能够带动患者移动,患者的手部握住握把8发力,患者的脚部此时能够通过固定绳105带动放置板104以导轨102为圆心逆时针旋转,放置板104带动转杆103旋转,转杆103通过第一拉绳115拉动滑动块114向右移动,第一弹簧113压缩,滑动块114通过调节杆118带动最右方的配重块117向右移动,以此能够对患者施加腿部压力,进行康复训练的操作,随后患者放松腿部,转杆103以导轨102为圆心顺时针旋转向下移动并松开第一拉绳115,第一弹簧113复位,滑动块114在第一弹簧113复位的作用下通过调节杆118带动最右方的配重块117向左移动复位,随后操作人将调节杆118从滑动块114和最右方的配重块117之间拔出,根据患者的康复程度将调节杆118插入至滑动块114和左方的配重块117之间,以此能够增加滑动块114的重力,在患者训练完成后,操作人使患者脚部从放置板104上脱离,使固定绳105松开患者,随后再将患者从坐垫5上扶起离开。
38.实施例2
39.在实施例1的基础之上,如图1、图6和图7所示,还包括有夹紧机构12,夹紧机构12包括有安装板121、第一固定垫122、第二固定垫123、滑动垫124、第二导杆125和第二弹簧126,两根转杆103相向的一侧上对称式栓接有安装板121,两块安装板121相向的一侧上对称式栓接有第一固定垫122,安装板121右部内侧栓接有第二固定垫123,两块安装板121相离的一侧上对称地滑动式贯穿有第二导杆125,第二导杆125与安装板121之间连接有第二弹簧126,两根第二导杆125相向的一侧上栓接有滑动垫124。
40.如图1、图8和图9所示,还包括有卡住机构13,卡住机构13包括有第一支板131、第三导杆132、第三弹簧133和楔形块134,支撑架1右下部前后两侧对称式焊接有第一支板131,第一支板131上滑动式贯穿有两根第三导杆132,两根第三导杆132右部之间焊接有与第二导杆125接触的楔形块134,楔形块134与第一支板131之间连接有绕设在相近第三导杆132外侧的第三弹簧133。
41.起初,楔形块134卡住第二导杆125,第二弹簧126正处于拉伸状态,在患者乘坐在坐垫5上后,患者的腿部能够穿过安装板121左方,通过第一固定垫122、第二固定垫123和滑动垫124能够防护住患者的腿部,同时也能够提高患者腿部的舒适度,操作人带动楔形块134向左移动松开第二导杆125,第二弹簧126复位,第二导杆125在第二弹簧126复位的作用下带动滑动垫124以靠近患者腿部的方向移动,以此能够通过滑动垫124将患者腿部夹紧,随后操作人通过第二导杆125带动滑动垫124以远离患者腿部的方向移动,第二弹簧126拉伸,以此能够使滑动垫124松开患者腿部,第二导杆125在移动的过程中会挤压楔形块134向左移动,第三弹簧133压缩,第二导杆125继续移动会松开楔形块134,第三弹簧133复位,楔形块134在第三弹簧133复位的作用下向右移动再次将第二导杆125卡住。
42.实施例3
43.在实施例2的基础之上,如图1和图10所示,还包括有制动机构14,制动机构14包括有橡胶套141、第二支板142、制动板143、第四导杆144、第四弹簧145、第三支板146、第五导杆147和第五弹簧148,转轴3中部套设有橡胶套141,坐垫5底部左侧前后对称式焊接有第二支板142,第二支板142左部转动式设有与橡胶套141接触的制动板143,第二支板142上连接有与制动板143滑动式配合的第四导杆144,制动板143与第二支板142之间连接有绕设在第四导杆144外侧的第四弹簧145,支撑架1下部左侧栓接有第三支板146,第三支板146上从上往下依次滑动式贯穿有四根第五导杆147,上方两根第五导杆147的左侧之间和下方两根第五导杆147的右侧之间均焊接有与相近制动板143接触的卡块,卡块与第三支板146之间连接有绕设在第五导杆147外侧的第五弹簧148。
44.如图1和图11所示,还包括有脱扣机构15,脱扣机构15包括有第二导套151、第二拉绳152和连接轴153,支撑架1下左部前后两侧均栓接有第二导套151,从上往下数第一根第五导杆147右侧和第三根第五导杆147左侧均连接有滑动式贯穿于相近第二导套151的第二拉绳152,两根第二拉绳152尾端之间连接有连接轴153。
45.起初,卡块卡住制动板143,第四弹簧145正处于拉伸状态,制动板143将橡胶套141卡住,滚轮4此时较难移动,在需要移动患者时,操作人使用脚部向下踩动连接轴153,连接轴153通过第二拉绳152拉动第五导杆147移动,第五导杆147带动卡块以远离制动板143的方向移动,第五弹簧148压缩,卡块随之松开制动板143,第四弹簧145复位,制动板143在第四弹簧145复位的作用下以第二支板142为支点逆时针旋转并松开橡胶套141,以此使滚轮4正常移动,随后操作人以第二支板142为支点带动制动板143逆时针旋转再次将橡胶套141卡住,松开连接轴153,第五弹簧148复位,卡块在第五弹簧148复位的作用下以靠近制动板143的方向移动,卡块随之再次卡住制动板143,以此能进行刹车的操作。
46.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。