1.本发明涉及船舶控制工程与船舶自动化航行技术领域,具体而言,尤其涉及一种水面无人艇轨迹跟踪控制方法,适用于水面无人艇轨迹跟踪控制。
背景技术:
2.目前世界各国对海洋资源及主权的重视程度日益增加,推动无人化装备快速发展。其中水面无人艇以其快速机动性,高灵活性以及低成本等著多特性被广泛关注。但是由于水面无人艇行驶的海洋环境复杂多变,轨迹跟踪控制研究尚不成熟。
3.常用的轨迹跟踪控制方法有反步法、模糊神经网络等等。但是传统轨迹跟踪控制方法存在如下问题:
4.(1)水面无人艇运动学和动力学建模困难问题,水面无人艇在海洋环境中会受到风,浪,流的扰动影响,传统控制算法为了达到好的控制效果往往忽略这些扰动,设计的控制器得不到实际应用,轨迹跟踪的精度难以达到要求。
5.(2)能量消耗巨大问题,传统轨迹跟踪控制研究目的是提高轨迹跟踪的精度,忽略高精度轨迹跟踪对驱动器性能严格要求,从而导致能量消耗巨大,降低了无人艇航行效率。
6.论文《robust state-error port-controlled hamiltonian trajectory tracking control for unmanned surface vehicle with disturbance uncertainties》提供的控制器,在水面无人艇运动学和动力学建模时忽略了洋流变化对运动学方程的影响,在实际应用中,难以达到轨迹跟踪效果;
7.综上所述,如何在复杂海洋环境下设计水面无人艇轨迹跟踪控制器已成为亟待解决的难点。
技术实现要素:
8.本发明的目的是提出一种水面无人艇轨迹跟踪控制方法,解决水面无人艇运动学和动力学建模困难、能量消耗巨大问题。
9.本发明为了解决上述问题采用以下技术方案:设计了一种水面无人艇轨迹跟踪控制方法,考虑洋流变化以及环境扰动对水面无人艇进行三自由度建模,进一步搭建干扰观测器对干扰进行观测和洋流自适应估计律对洋流进行估计,将干扰值和洋流估计值结合状态误差端口受控哈密顿控制器设计轨迹跟踪控制律,实现精准轨迹跟踪。具体包括以下步骤:
10.s1:
11.建立考虑洋流变化的带扰动水面无人艇三自由度的运动学和动力学方程;
12.s2:
13.构建状态误差端口受控哈密顿控制器;
14.s3:
15.搭建扰动观测器和洋流自适应估计律;
16.s4:
17.根据扰动观测器和洋流自适应估计律以及状态误差端口受控哈密顿控制器设计轨迹跟踪控制律;
18.s5:
19.设计李雅普诺夫函数,证明控制系统的稳定性;
20.s6:
21.对三自由度的水面无人艇进行仿真验证,验证算法的有效性。
22.所述s1中,建立考虑洋流变化的带扰动水面无人艇三自由度的运动学和动力学方程具体为:
[0023][0024][0025]
其中,式(1)中,η=[η
x
,ηy,η
ψ
]
t
为地球惯性坐标系下水面无人艇位置矢量,(η
x
,ηy)为具体位置坐标,η
ψ
为航向角,υ=[u,v,r]
t
为船体固定坐标系下水面无人艇速度矢量,(u,v)为线速度,r为角速度,υr=[ur,vr,0]
t
为洋流速度矢量,(ur,vr)为洋流线速度,r(η
ψ
)为地球惯性坐标系与船体固定坐标系间的旋转矩阵,具体为:
[0026][0027]
式(2)中,τ为控制率,为扰动输入矢量,m,c,d分别为水面无人艇质量矩阵、科里奥利向心力矩阵以及阻尼矩阵;
[0028]
所述s2中,端口受控哈密顿模型为:
[0029][0030][0031]
其中,x为状态向量,y为输出向量,τ为输入向量,jo为斜对称矩阵,有do为耗散矩阵,有h为哈密顿函数,go为变换矩阵。
[0032]
重新定义状态变量x,将水面无人艇运动学(1)和动力学(2)转化为端口受控哈密顿模型:
[0033][0034]
在不考虑洋流变化和干扰的情况下重写为如下:
[0035][0036]
其中,
[0037]
[0038][0039]
将状态跟踪误差定义为:
[0040][0041]
其中,为水面无人艇期望参考时变轨迹,为期望速度,可通过如下公式计算得到:
[0042][0043]
其中,为的导数,为二阶导数,为的导数。
[0044]
进一步得到状态误差端口受控哈密顿模型,如下:
[0045][0046]
其中,为期望耗散矩阵,hd为期望的哈密顿函数,表示为如下:
[0047][0048]
其中,k为参数矩阵,进而状态误差端口受控哈密顿控制器,如下:
[0049][0050]
所述s3扰动观测器为
[0051][0052][0053]
其中,为扰动估计向量,ε为中间辅助向量,k0为对称正定的增益矩阵。
[0054]
所述s3洋流自适应估计律设计如下:
[0055][0056]
其中,为η
x
,ηy估计值的一阶导数,和是估计误差,l1,l2为正常数,分别为ur,vr的估计值,更新的如下所示:
[0057][0058]
其中,λ
x
,λy,k
x
,ky为正常数,为过滤权重估计,如下:
[0059][0060]
所述s4中,根据洋流自适应估计律得到的对式(8)进行变换,如下:
[0061][0062]
其中,为洋流估计向量,根据干扰观测器输出进一步设计控制律,如下:
[0063][0064]
所述s5中,选择李雅普诺夫函数,如下:
[0065][0066]
其中,为干扰误差,为权重估计误差,对式(18)求导,如下:
[0067][0068]
利用杨氏不等式和完全平方不等式,有:
[0069][0070]
其中,σ,σ1,是一个小的正常数,λ
min
(
·
)是矩阵最小特征值,进一步式(19)可以重写为:
[0071][0072]
其中,λ
max
(
·
)为矩阵的最大特征值,通过选择的参数,可以使得:
[0073][0074]
同时,进而使得证明了控制系统的稳定性。
[0075]
本发明具有如下有益效果:
[0076]
1.本发明所述方法建立的考虑洋流变化的带扰动水面无人艇三自由度的运动学和动力学方程,考虑了洋流变化和环境干扰对水面无人艇运动影响,进而设计控制器实现精准轨迹跟踪控制;
[0077]
2.本发明所述方法设计的干扰观测器和洋流自适应估计律能够较好观测干扰和估计洋流,观测精度达到99%,估计精度达到94.11%,为设计控制律打下坚实的基础;
[0078]
3.本发明所述方法构建的状态误差端口受控哈密顿控制器借助哈密顿模型实现在水面无人艇轨迹跟踪中整体能量消耗小,结合干扰观测器和洋流自适应估计律设计控制律,轨迹跟踪精度达到90.91%。
附图说明
[0079]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0080]
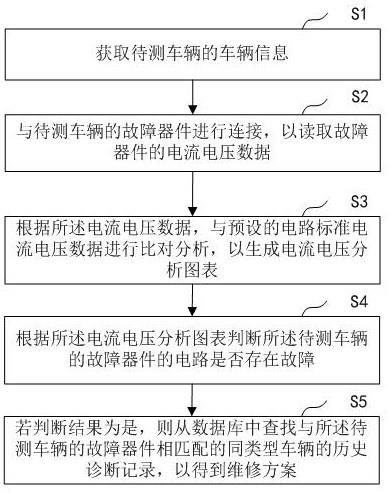
图1为水面无人艇轨迹跟踪控制方法流程图;
[0081]
图2为水面无人艇轨迹跟踪控制系统框图;
[0082]
图3为干扰观测器效果图;
[0083]
图4为洋流自适应估计律效果图;
[0084]
图5为水面无人艇位置跟踪效果图。
具体实施方式
[0085]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0086]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0087]
如图1所示,本发明提供了一种水面无人艇轨迹跟踪控制方法,包括如下步骤:
[0088]
s1:
[0089]
建立考虑洋流变化的带扰动水面无人艇三自由度的运动学和动力学方程;
[0090]
s2:
[0091]
构建状态误差端口受控哈密顿控制器;
[0092]
s3:
[0093]
搭建扰动观测器和洋流自适应估计律;
[0094]
s4:
[0095]
根据扰动观测器和洋流自适应估计律以及状态误差端口受控哈密顿控制器设计如图2所示轨迹跟踪控制律;
[0096]
s5:
[0097]
设计李雅普诺夫函数,证明控制系统的稳定性;
[0098]
s6:
[0099]
对三自由度的水面无人艇进行仿真验证,验证算法的有效性。
[0100]
所述s1中,建立考虑洋流变化的带扰动水面无人艇三自由度的运动学和动力学方程具体为:
[0101][0102][0103]
其中,式(1)中,η=[η
x
,ηy,η
ψ
]
t
为地球惯性坐标系下水面无人艇位置矢量,(η
x
,ηy)为具体位置坐标,η
ψ
为航向角,υ=[u,v,r]
t
为船体固定坐标系下水面无人艇速度矢量,(u,v)为线速度,r为角速度,υr=[ur,vr,0]
t
为洋流速度矢量,(ur,vr)为洋流线速度,r(η
ψ
)为地球惯性坐标系与船体固定坐标系间的旋转矩阵,具体为:
[0104][0105]
式(2)中,τ为控制率,为扰动输入矢量,m,c,d分别为水面无人艇
质量矩阵、科里奥利向心力矩阵以及阻尼矩阵;
[0106]
所述s2中,端口受控哈密顿模型为:
[0107][0108][0109]
其中,x为状态向量,y为输出向量,τ为输入向量,jo为斜对称矩阵,有do为耗散矩阵,有h为哈密顿函数,go为变换矩阵。
[0110]
重新定义状态变量x,将水面无人艇运动学(1)和动力学(2)转化为端口受控哈密顿模型:
[0111][0112]
在不考虑洋流变化和干扰的情况下重写为如下:
[0113][0114]
其中,
[0115][0116][0117]
将状态跟踪误差定义为:
[0118][0119]
其中,为水面无人艇期望参考时变轨迹,为期望速度,可通过如下公式计算得到:
[0120][0121]
其中,为的导数,为二阶导数,为的导数。
[0122]
进一步得到状态误差端口受控哈密顿模型,如下:
[0123][0124]
其中,为期望耗散矩阵,hd为期望的哈密顿函数,表示为如下:
[0125][0126]
其中,k为参数矩阵,进而状态误差端口受控哈密顿控制器,如下:
[0127][0128]
所述s3扰动观测器为
[0129][0130][0131]
其中,为扰动估计向量,ε为中间辅助向量,k0为对称正定的增益矩阵。
[0132]
所述s3洋流自适应估计律设计如下:
[0133][0134]
其中,为η
x
,ηy估计值的一阶导数,和是估计误差,l1,l2为正常数,分别为ur,vr的估计值,更新的如下所示:
[0135][0136]
其中,λ
x
,λy,k
x
,ky为正常数,为过滤权重估计,如下:
[0137][0138]
所述s4中,根据洋流自适应估计律得到的对(8)进行变换,如下:
[0139][0140]
其中,为洋流估计向量,根据干扰观测器输出进一步设计控制律,如下:
[0141][0142]
所述s5中,选择李雅普诺夫函数,如下:
[0143][0144]
其中,为干扰误差,为权重估计误差,对式(18)求导,如下:
[0145][0146]
利用杨氏不等式和完全平方不等式,有:
[0147][0148]
其中,σ,σ1,是一个小的正常数,λ
min
(
·
)是矩阵最小特征值,进一步式(19)可以重写为:
[0149][0150]
其中,λ
max
(
·
)为矩阵的最大特征值,通过选择的参数,可以使得:
[0151]
[0152]
同时,进而使得证明了控制系统的稳定性。
[0153]
所述s6中,对三自由度的水面无人艇进行仿真验证,验证算法的有效性。
[0154]
参考轨迹定义如下:
[0155][0156]
干扰设置为τb=[0.2,0.3,0.4]
t
,洋流设置为υr=[0.2,0.1,0]
t
,水面无人艇动力学方程m,c,d矩阵为:
[0157][0158]
仿真参数l1=3,l2=3,λ
x
=10,λy=10,k
x
=0.1,ky=0.1,λ
rx
=2,λ
ry
=2,矩阵k,k1,dd为:
[0159][0160]
干扰观测器效果如图3所示,可以看出干扰被快速观测,观测精度达到99%,洋流自适应估计律效果如图4所示,可以看出洋流被有效估计,估计精度达到94.11%,水面无人艇位置跟踪效果如图5所示,整体跟踪效果好,跟踪精度达到90.91%,验证算法有效性。
[0161]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。