技术特征:
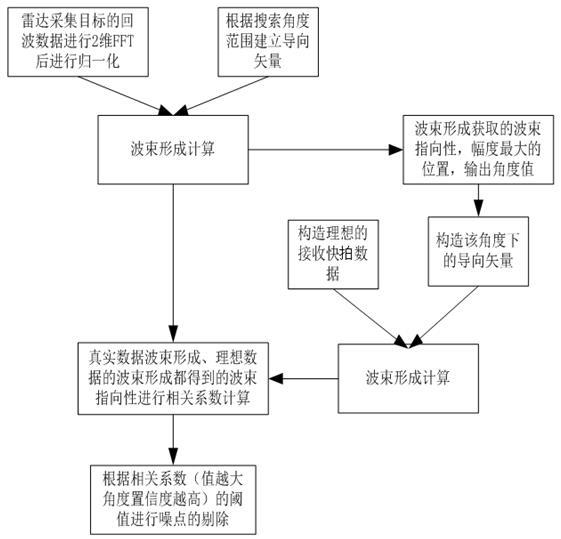
1.一种车载毫米波雷达角度置信度估计方法,其特征在于,包括如下步骤:1)雷达采集目标位置回波数据进行二维快速傅里叶变换后进行归一化;2)将归一化后的真实数据和导向矢量进行波束形成计算;3)经过波束形成计算后得到的波束指向性,找到幅度最大值的横坐标为目标所在的角度值;4)根据角度值以及雷达天线的布阵方式,构造所述角度值下的导向矢量;5)将构造的导向矢量和构造的接收快拍数据进行波束形成计算,得到所述角度值下理想的波束指向性;6)根据真实数据得到的波束指向性和理想的波束指向性进行相关系数计算,相关系数越大角度置信度越高;7)根据相关系数的阈值,进行噪点的剔除。2.根据权利要求1所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述波束形成计算的具体步骤为:建立接收信号矢量模型:建立接收信号矢量模型:为维阵列接收快拍数据矢量,;为维信号矢量,;为维导向矢量矩阵,;其中第个信号的导向矢量为:,,其中为波数,n为等间距线性阵个数,相邻阵元之间的间距为,为入射到空间阵列上的远场窄带信号个数,为波长;为信号的来波方向;则单一信号源:;对接收信号进行加权求和,加权后天线阵的输出为:,即波束指向性;其中:为波束形成的权矢量,表示共轭转置。3.根据权利要求1所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述步骤6)中相关系数的计算方法为:其中,:样本1的第个值;:样本1的均值;:样本2的第个值;:样本2的均值;样本总数;且的绝对值介于,当越接近1,表示与两个变量之间的相关程度就越强,越接近于0,与两个变量之间的相关程度就越弱。4.根据权利要求3所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述步骤7)中对相关系数小于0.4的噪点进行剔除。5.根据权利要求1所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述
步骤1)二维快速傅里叶变换的具体方法为先后对将雷达采集的目标位置回波数据的距离和角度进行快速傅里叶变换。6.根据权利要求1所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述波束形成计算是通过雷达工具箱进行计算,所述雷达工具箱为nxpradartoolbox。7.根据权利要求1所述的一种车载毫米波雷达角度置信度估计方法,其特征在于:所述步骤1)中归一化是将二维快速傅里叶变换后的数据除以自身模值。
技术总结
本发明公开了一种车载毫米波雷达角度置信度估计方法,雷达采集数据进行二维快速傅里叶变换后进行归一化,将归一化后的真实数据和导向矢量进行波束形成计算得到的波束指向性,确定目标所在的角度值,根据角度值以及雷达天线的布阵方式,构造所述角度值下的导向矢量,将构造的导向矢量和构造的接收快拍数据进行波束形成计算,得到所述角度值下理想的波束指向性,根据真实数据得到的波束指向性和理想的波束指向性进行相关系数计算,根据相关系数的阈值,进行噪点的剔除。该车载毫米波雷达角度置信度估计方法,通过构造理想的信号,与真实信号的做对比,且相关系数计算使用波形的整个信息,使得角度置信度的准确性更高。使得角度置信度的准确性更高。使得角度置信度的准确性更高。
技术研发人员:常小磊 李从志 朱彦博
受保护的技术使用者:南京楚航科技有限公司
技术研发日:2022.04.06
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。