1.本发明属于轨道交通检测技术领域,尤其是涉及一种基于城轨列车车轮踏面的点云数据处理方法。
2.背景领域
3.随着轨道列车不断提速,对于列车部件的安全性能要求愈发严格,轮对作为列车服役中的关键部件,其车轮踏面尺寸的检修对于列车安全运营具有重要意义。目前检修工人常采用手工测量的方式,存在检测工作强度大、效率低等问题。因此,以激光轮廓传感器为代表的非接触式检测逐渐成为轮对车轮踏面检测的主要手段。
4.由于激光轮廓传感器检测时,极易受环境光线、被测物体材质与表面光滑度等因素影响,因此需要对检测到的点云数据进行处理,确保不失真,方能精确提取车轮踏面几何参数特征,实现数字化。针对目前车轮踏面点云数据处理方法存在失真、计算复杂、效率低等问题,本发明提供了一种基于城轨列车车轮踏面的点云数据处理方法。
技术实现要素:
5.本发明的目的在于提供一种精确、高效的车轮踏面线点云数据处理方法,从而提高列车车轮踏面几何参数特征的提取精度,实现数字化。
6.为实现上述目的,本发明提供了如下方案:
7.一种列车车轮踏面检测装置,包括:轮对、轮对驱动装置、步进电机驱动器、plc控制器、pc电脑端、激光轮廓传感器、步进电机滚珠丝杠和机架;
8.所述轮对包括车轮与车轴;
9.所述pc电脑端将程序写入plc控制器;所述plc控制器通过步进电机驱动器分别控制轮对驱动装置和步进电机滚珠丝杠运动;
10.所述激光轮廓传感器通过步进电机滚珠丝杠送至车轮踏面正上方;
11.所述轮对驱动装置用于驱动轮对车轮旋转;
12.一种基于城轨列车车轮踏面的点云数据处理方法,应用于所述的一种列车车轮踏面检测装置,所述点云数据处理方法包括:
13.步骤1,获取车轮踏面轮廓线点云数据:利用激光轮廓传感器扫描获取车轮踏面轮廓线点云数据;
14.步骤2,踏面轮廓线点云数据的坏点处理:将轮对踏面轮廓线点云数据进行坏点识别与剔除,从而得到点云坐标波动较小的含噪点云数据;
15.步骤3,分段滤波:根据车轮踏面轮廓各区域的特征选用分段滤波器,选取相应参数并对含噪点云进行滤波处理;
16.步骤4,车轮踏面几何特征提取:根据踏面尺寸定义准则提取几何特征参数;
17.步骤5,车轮踏面轮廓三维重构:对处理后的踏面线点云数据进行坐标变换与线点云拼接,实现车轮踏面三维重构。
18.与现有技术相比,本发明所提供的方法具有以下优点:(1)根据坏点呈现的局部形
状特征,建立离群判别函数对坏点进行有效识别与精准剔除;(2)根据车轮踏面多曲率特征选择不同的滤波方法,每种滤波方法进行参数最优选择,降低了线点云数据的噪声,提高了车轮踏面几何参数特征的提取精度,并实现数字化。
附图说明
19.图1为本发明所提供的一种基于城轨列车车轮踏面的点云数据处理方法流程图;
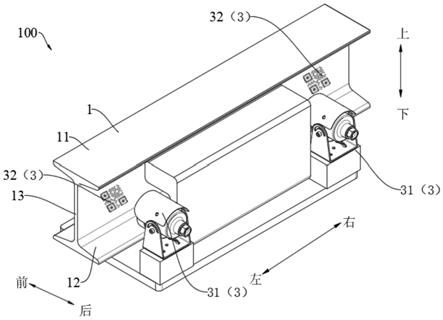
20.图2为列车车轮踏面检测装置;
21.图3离群判别函数fi移动窗口示意图;
22.图4为车轮踏面轮廓线分段滤波边界基准点设置;
23.图5为坏点剔除后车轮踏面轮廓线点云图;
24.图6为分段滤波后车轮踏面轮廓线点云图;
25.图7为车轮踏面轮廓部分几何参数;
26.图8为车轮踏面三维重构点云图。
27.图中,1.pc电脑端、2.plc控制器、3.步进电机驱动器、4.轮对驱动装置、5.车轮、6.步进电机滚珠丝杠、7.lm
a-30型车轮踏面、8.激光轮廓传感器、9.机架、10.车轴。
具体实施方式
28.下面结合附图及具体实施例对本发明作进一步详细说明
29.结合图1,本发明涉及一种基于列车车轮踏面检测装置的车轮踏面点云数据处理方法,包括以下步骤:
30.步骤1,获取车轮踏面轮廓线点云数据:利用激光轮廓传感器8获取lm
a-30型车轮踏面7轮廓线点云数据;具体为:在列车轮对走行部搭建车轮踏面检测装置,如图2所示,该装置包括轮对四周的机架9,在车轮踏面正上方的机架9上安装有步进电机滚珠丝杠6和激光轮廓传感器8;车轮5安装有轮对驱动装置4,通过plc控制器2发出脉冲信号驱动电机和摩擦轮转动,进而通过摩擦传动驱动车轮5作旋转运动。当车轮5旋转360
°
,激光轮廓传感器8完成车轮踏面轮廓的全局扫描,即得到踏面轮廓线点云的原始数据。
31.获取的点云数据为p为激光轮廓传感器采集到的某条车轮踏面轮廓线上有效点云个数,q为车轮踏面轮廓线条数序列值。
32.步骤2,踏面轮廓线点云数据的坏点处理:针对车轮踏面轮廓线上各点云进行坏点特征识别与剔除,得到点云坐标波动较小的含噪点云数据;
33.具体过程如下:计算每条线上各点处的离群判别函数fi值,公式为;
[0034][0035][0036]
[0037]
其中:λ为踏面轮廓线不同段的影响系数,可根据经验值进行选取;ma为移动窗口内各点ai的最大值;mh为移动窗口内各点hi的最大值。若fi≥e则当前点被认定为坏点并剔除,若fi<e则保留当前点并移动计算下一个点fi和e;e计算公式为:
[0038][0039]
其中:为窗口内离群判别函数的平均值,t为移动窗口内的数据点个数。
[0040]
步骤3,分段滤波:根据车轮踏面轮廓各区域特征选用分段滤波器,对含噪点云进行滤波处理;具体为:在多曲率小圆弧段采用基于距离的高斯加权s-g滤波,在大曲率圆弧段采用高斯滤波,在线性段采用中值滤波,如图4所示。
[0041]
所述高斯加权s-g滤波器为:
[0042][0043]
其中,xi为待拟合数据,wi为权重系数,yi为拟合值,pi为多项式拟合系数,m为移动窗口最右侧点序列值,l为窗口中点单侧邻域点数,i为拟合点数,n为多项式阶数。
[0044]
所述高斯加权s-g滤波的权重系数为:
[0045][0046]
其中,||d
j-di||移动窗口内pj点到窗口中心点pi点的欧氏距离,σ为窗口宽度,d
av
为移动窗口内所有点到中心点欧式距离的平均值。
[0047][0048]
其中,l为窗口中点单侧邻域点数。
[0049]
采用hausdorff距离判别法确定各滤波器的参数(窗口宽度σ与多项式阶数n)。
[0050]
步骤4,车轮几何特征提取:根据踏面尺寸参数定义准则提取车轮相应的几何特征参数;具体参数提取如图7所示。具体步骤为,从车轮内侧面横向偏移xamm确定基点a位置及坐标,基点与轮缘最高点c的垂直距离为轮缘高度;过基点引垂直方向的直线,距离基点的高度为xbmm,此时通过该点的横向垂线与轮缘部分有两个交点,两个交点横坐标之差即为轮缘厚度;车轮内侧面点到车轮外侧面点的横向距离为轮辋宽度。
[0051]
步骤5,车轮踏面轮廓三维重构:经上述处理后,对车轮踏面点云数据进行坐标变换与线点云拼接,合成车轮踏面三维模型;具体为:根据步骤4提取到的基点坐标,利用坐标变换矩阵,其中平移矩阵t和旋转矩阵r如下所示:
[0052][0053]
其中,z为车轮半径,θ为每条轮廓线绕x轴旋转的角度,其值为q为车轮踏面轮廓线序列值,q
max
为车轮踏面轮廓线最大序列值;
[0054]
下面结合具体实例对本发明作进一步详细说明
[0055]
实施例1
[0056]
基于所提供的一种列车车轮踏面检测装置,搭建实物并进行试验,以所采集的车轮踏面数据为研究对象,获取第2084条车轮踏面轮廓线点云数据,如图5(a)所示,共含有1809个数据点,具体如下:
[0057][0058]
利用角度-距离的坏点特征分析识别并用离群判别函数剔除坏点,识别的坏点被标记为红色并被剔除,如图5(b)、(c)、(d)所示。
[0059]
利用hausdorff距离判别滤波前后踏面轮廓点云的相似程度,确定分段滤波各滤波器的最优参数,其中选取高斯加权s-g滤波器中窗口宽度σ为9、多项式阶数为8,高斯滤波器和移动中值滤波器的窗口宽度σ分别设为7和5。
[0060]
所述高斯加权s-g滤波器的权重系数如表1所示。
[0061]
表1部分窗口基于距离的高斯权重
[0062][0063]
对剔除坏点后的点云数据进行分段滤波,滤波后轮对轮廓如图6(a)所示,部分段滤波效果如图6(b)、(c)、(d)所示。
[0064]
根据滤波后的结果,结合轮对踏面轮廓部分几何特征参数,如图7所示,所述基点
距离车轮内侧面xa=70mm,同时垂直距离xb=12mm处,计算得轮缘厚度30.352mm,同时提取其它的几何特征参数轮缘高度为26.7286mm,轮辋宽度为134mm。
[0065]
根据所测车轮的踏面轮廓线最大序列值为6688,车轮半径445mm,利用旋转平移矩阵进行三维重构,其旋转平移变换计算过程与变换后新坐标为:
[0066][0067]
…
[0068][0069]
同理,将其它序列上的轮廓线点云坐标进行相同计算,变换后得到的坐标为最后将所有变换后的坐标置于同一坐标系,即可视为拼接得到重构后的车轮踏面轮廓,实现数字化,其重构造型如图8所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。