技术特征:
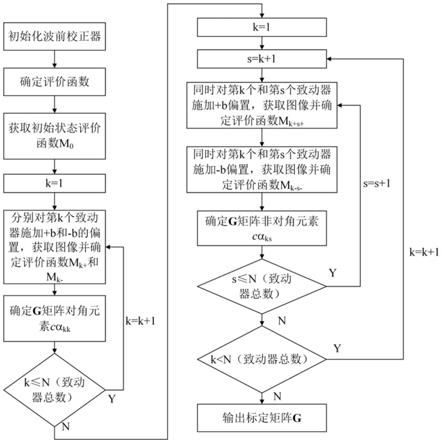
1.一种无波前传感器自适应光学系统自标定方法,其特征在于:包括如下步骤:步骤一:初始化波前校正器:初始化波前校正器控制信号,并将初始化状态下的波前校正器设置为0状态;采用影响函数基底表示被标定的自适应光学系统的总像差,如式(1)所示:其中,ф为像差,v
i
表示产生像差所对应的第i个致动器影响函数系数,即波前校正器第i个致动器控制信号变化量,f
i
表示第i个致动器影响函数,i表示波前校正器致动器序号,i=1:n,n为波前校正器致动器个数;步骤二:确定图像评价函数:确定被标定的自适应光学系统的图像评价函数与波前校正器致动器控制信号之间的关系,如式(2)所示:其中,m是评价函数,m
e
是像差为0时评价函数的值,c为常数系数,α
ij
是模式之间的内积,v
i
以及v
j
分别代表第i个波前校正器致动器控制信号以及第j个波前校正器致动器控制信号;进一步的,被标定的自适应光学系统的图像评价函数与波前校正器致动器控制信号之间的关系表示为矩阵形式,如式(3)所示:m≈m
e-v
t
gv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,v是控制信号组成的向量,g为所需要获得的标定矩阵,如式(4)所示:步骤三:获取初始评价函数m0:在初始条件下采集图像,并确定评价函数m0,初始评价函数值m0与波前校正器致动器控制信号之间的关系如式(5)所示:步骤四:依次对波前校正器致动器施加正负偏置控制信号:对第k(k=1:n)个波前校正器致动器施加 b以及-b的正负偏置控制信号,采集图像并确定评价函数,分别如式(6)以及式(7)所示:确定评价函数,分别如式(6)以及式(7)所示:确定由正负偏置引起的评价函数变化量,分别如式(8)和式(9)所示:
将正负偏置引起的评价函数变化量叠加,通过标定能够得到标定矩阵g中对角线上的元素,如式(10)所示:步骤五:同时对两个不同的波前校正器致动器施加正负偏置控制信号:同时对第k(k=1:n)个波前校正器致动器以及第s(s=k 1:n)个波前校正器致动器同时施加大小为 b以及-b的正负偏置控制信号,采集图像并确定其评价函数,通过标定能够得到标定矩阵g中非对角线上的元素,如式(11)所示:又因为标定矩阵g是对称矩阵,所以cα
ks
=cα
sk
;至此,标定矩阵g中的所有元素都通过自标定获取,完成整个标定过程。2.根据权利要求1所述的一种无波前传感器自适应光学系统自标定方法,其特征在于:步骤二中,评价函数m能够采用斯特列尔比、光斑均方半径、图像功率谱密度低频积分的倒数或者图像均方半径。
技术总结
本发明涉及一种无波前传感器自适应光学系统自标定方法,属于光学技术领域。本发明通过对波前校正器致动器施加偏置,并采集图像确定评价函数的方式,实现无波前传感器自适应光学系统的自标定;包括以下步骤:初始化波前校正器,确定图像评价函数,获取初始评价函数,依次对波前校正器致动器施加正负偏置,同时对两个不同的波前校正器致动器施加正负偏置,最终确定标定矩阵。本发明不需要使用波前传感器,对波前校正器致动器施加相应偏置,采集图像,确定评价函数,得到标定矩阵,实现对评价函数与波前校正器致动器的控制量之间关系的标定;在标定过程中消除初始像差对标定结果的影响,扩大标定方法的应用范围;标定过程简便,数据处理量小。处理量小。处理量小。
技术研发人员:董冰 张泽霞 任虹禧
受保护的技术使用者:北京理工大学
技术研发日:2022.03.03
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。