1.本发明涉及机器人技术领域,具体涉及一种可以实现制冷并保温的物流机器人储物内胆。
背景技术:
2.随着物流行业的发展,智慧物流开始成为物流未来发展的一大趋势,随即产生的物流机器人也开始得到了广泛应用。物流机器人是指应用于仓库、分拣中心、以及运输途中等场景的,进行货物转移、搬运等操作的机器人。作为整个物流系统中末端配送的最后一环,配送机器人所具备的高负荷、全天候工作、智能等优点,将为物流行业的“最后一公里”带去全新的解决方案。在有些需要冷链运输的货物转运场景中,要求物流机器人具有制冷并保温的功能,中国发明专利cn201210553447.2公开了一种饮水机及饮水机制冷内胆,包括内胆本体和设置在内胆本体外壁上的外蒸发器,外蒸发器为铝制外蒸发器,外蒸发器缠绕设置在内胆本体的外壁上,制冷内胆由外蒸发器提供制冷冷量,冷量通过内胆本体传导到其内部,并完成制冷,通过将铜制外蒸发器更换为铝制外蒸发器,由于铝制外蒸发器较铜制蒸发器具有更加柔软的性质,因此在缠绕设置在内胆本体上时,能够与制冷内胆的内胆本体的外壁具有更加紧密的贴合度,从而使得在由外蒸发器传递冷量时,冷量损失量小,提高了冷量传递量;且铝制外蒸发器较铜制外蒸发器材料成本低,提高了饮水机制冷内胆的性价比。上述专利是应用在饮水机上的,其使用的场景和方式都与物流机器人的内胆有很大的区别,是固定在饮水机上的,无需移动,同时它的电源获取方式采取固定电源方式,本技术的目的在于提供一种根据物流机器人的使用特点设计的可以实现制冷并保温的物流机器人储物内胆。
技术实现要素:
3.为解决上述问题,本发明提出一种可以实现制冷并保温的物流机器人储物内胆,根据物流机器人的使用特点优化了内胆结构,给储物内胆进行制冷并添加保温功能,在此基础上还设置了自动快速插接功能,实现了储物内胆与物流机器人之间的自动装卸。
4.本发明的目的是通过以下技术方案实现的。
5.一种可以实现制冷并保温的物流机器人储物内胆,包括内胆外壳、内胆保温层、外蒸发器、内胆体、内胆盖、盖保温层、微控制器、温度传感器和蓄电池,其特征在于,外蒸发器套装在内胆体的外周,外蒸发器和内胆体安装在内胆外壳中,在外蒸发器和内胆体与内胆外壳之间设置有内胆保温层,内胆盖可开合地安装在内胆外壳的上方开口处,在内胆盖的内侧设置有盖保温层;微控制器、温度传感器和蓄电池集成在所述物流机器人储物内胆上,温度传感器用于检测内胆体内的温度,温度传感器与微控制器通信连接,蓄电池为外蒸发器和微控制器提供电源。
6.如上所述的可以实现制冷并保温的物流机器人储物内胆,在内胆外壳上设置有与仓库固定杆座和机器人固定杆座配合的孔,在内胆外壳上还设置有用于锁紧仓库固定杆座
和机器人固定杆座的锁紧装置。
7.如上所述的可以实现制冷并保温的物流机器人储物内胆,所述锁紧装置为电动式锁紧装置。
8.如上所述的可以实现制冷并保温的物流机器人储物内胆,所述锁紧装置为机械连锁式锁紧装置。
9.一种可以实现制冷并保温的物流机器人储物内胆的使用方法,外蒸发器为内胆体提供制冷量,内胆保温层和盖保温层用于保温,打开内胆盖后可以将物品放入内胆体内,物品放置完毕后,将内胆盖合上。
10.如上所述的使用方法,进一步通过温度传感器检测内胆体内的温度并将检测温度值传递给微控制器,在微控制器内预设有温度阈值,当检测到的实时温度值高于温度阈值时,启动外蒸发器,当实时检测到的温度值低于温度阈值后,微控制器给外蒸发器发出指令使其停止运行。
11.如上所述的使用方法,所述储物内胆通过所述锁紧装置在仓库固定杆座和机器人固定杆座之间切换实现物流机器人储物内胆的工作状态和备货状态的切换。
12.本发明的有益效果在于:
13.本发明的可以实现制冷并保温的物流机器人储物内胆,根据物流机器人的使用特点优化了内胆结构,给储物内胆进行制冷并添加保温功能,在此基础上,还设置了自动快速插接功能,实现了储物内胆与物流机器人之间的自动装卸,可以根据不同的使用需求灵活选择可靠的锁紧方式,同时还集成有电源插接装置以实现储物内胆电源的切换。
附图说明
14.通过阅读下文优选实施方式的详细描述,本技术的方案和优点对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。在附图中:
15.图1为本发明实施例1的可以实现制冷并保温的物流机器人储物内胆的纵切面结构示意图。
16.图2为本发明实施例1的可以实现制冷并保温的物流机器人储物内胆控制方案原理图。
17.图3为本发明实施例2的可以实现制冷并保温的物流机器人储物内胆的纵切面结构示意图。
18.图4为本发明实施例2的可以实现制冷并保温的物流机器人储物内胆控制方案原理图。
19.图5为本发明实施例2的可以实现制冷并保温的物流机器人储物内胆的锁紧装置的另一种实现形式。
20.图中各附图标记所代表的组件为:
21.内胆外壳1,内胆保温层2,外蒸发器3,内胆体4,内胆盖5,盖保温层6,微控制器7,温度传感器8,蓄电池9,仓库固定杆座10,机器人固定杆座11,第一电动伸缩锁紧杆12,第二电动伸缩锁紧杆13,第一联动锁紧杆14,第二联动锁紧杆15,中间齿条杆16,固定齿条17,齿轮18,电动伸缩杆19,弹簧20。
具体实施方式
22.下面将参照附图更详细地描述本公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
23.实施例1
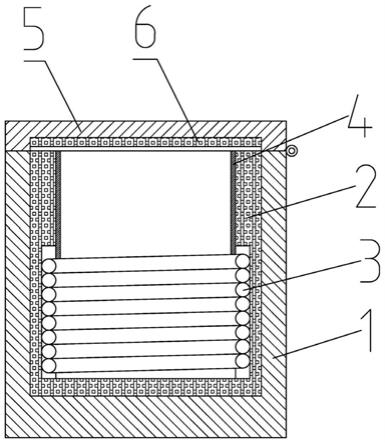
24.参见图1,图1为本发明实施例1的可以实现制冷并保温的物流机器人储物内胆的纵切面结构示意图。可以实现制冷并保温的物流机器人储物内胆,包括内胆外壳1、内胆保温层2、外蒸发器3、内胆体4、内胆盖5、盖保温层6、微控制器7、温度传感器8和蓄电池9,外蒸发器3缠绕套装在内胆体4的外周,外蒸发器3和内胆体4安装在内胆外壳1中,在外蒸发器3和内胆体4与内胆外壳1之间设置有内胆保温层2,内胆保温层2使用保温材料,内胆盖5可开合地安装在内胆外壳1的上方开口处,如在内胆盖5和内胆外壳1之间设置合页和卡扣,在内胆盖5的内侧设置有盖保温层6;微控制器7、温度传感器8和蓄电池9集成在所述物流机器人储物内胆上,温度传感器8用于检测内胆体4内的温度,温度传感器8与微控制器7通信连接,蓄电池9为外蒸发器3和微控制器7提供电源,由于储物内胆体积限制,蓄电池9仅提供临时电源,长时间使用需在储物内胆设置与其他相关件的电源结合装置以获取外部电力;图2为控制方案原理图,微控制器7用于给外蒸发器3下达指令执行启用和关闭,温度传感器8检测到内胆体4内的温度将信号传递给微控制器7,蓄电池9为外蒸发器3和微控制器7提供电源。
25.可以实现制冷并保温的物流机器人储物内胆的使用方法,外蒸发器3为内胆体4提供制冷量,内胆保温层2和盖保温层6用于保温,打开内胆盖5后可以将物品放入内胆体4内,物品放置完毕后,将内胆盖5合上,通过温度传感器8检测内胆体4内的温度并将检测温度值传递给微控制器7,在微控制器7内预设有温度阈值,当检测到的实时温度值高于温度阈值时,启动外蒸发器3,当实时检测到的温度值低于温度阈值后,微控制器7给外蒸发器3发出指令使其停止运行。
26.实施例2
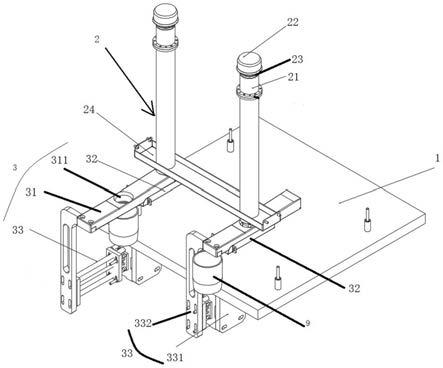
27.图3为本发明实施例2的可以实现制冷并保温的物流机器人储物内胆的纵切面结构示意图。为了实现储物内胆与物流机器人及未安装在物流机器人上时的快速自动切换,未安装在物流机器人在本发明中用仓库代为说明,其他任意为安装在物流机器人用于放置储物内胆的情况均可应用本结构,在内胆外壳1上设置有与仓库固定杆座10和机器人固定杆座11配合的孔,如图中所示,为了保证储物内胆的放置稳固,应至少设置两个仓库固定杆座10或机器人固定杆座11,在内胆外壳1上还设置有用于锁紧仓库固定杆座10和机器人固定杆座11的锁紧装置。
28.同样如图3所示,作为举例,锁紧装置为第一电动伸缩锁紧杆12和第二电动伸缩锁紧杆13,第一电动伸缩锁紧杆12和第二电动伸缩锁紧杆13选用电动推杆,与微控制器7和蓄电池9通过线缆连接,第一电动伸缩锁紧杆12和第二电动伸缩锁紧杆13分别与设置在仓库固定杆座10和机器人固定杆座11上的锁紧孔配合。
29.优选地,为了实现储物内胆从仓库或物流机器人处获取电源,在第一电动伸缩锁紧杆12的端部与仓库固定杆座10的锁紧孔的内端部或在第二电动伸缩锁紧杆13的端部与机器人固定杆座11的锁紧孔的内端部之间设置有电性结合装置,电性结合装置可以选用常
见的插头插座结构,即在第一电动伸缩锁紧杆12的端部或第二电动伸缩锁紧杆13的端部设置储物内胆的插头,在仓库固定杆座10的锁紧孔或机器人固定杆座11的锁紧孔内设置插座,通过第一电动伸缩锁紧杆12的端部与仓库固定杆座10的锁紧孔的内端部或在第二电动伸缩锁紧杆13的端部与机器人固定杆座11的锁紧孔的内端部之间插入与拔出动作即可实现电源的接通与断开。
30.所述储物内胆通过锁紧装置在仓库固定杆座10和机器人固定杆座11之间切换实现物流机器人储物内胆的工作状态和备货状态的切换。
31.参见图4,图4为本实施例的可以实现制冷并保温的物流机器人储物内胆控制方案原理图。本实施例中可以实现制冷并保温的物流机器人储物内胆的使用方法,当储物内胆未放置到物流机器人上时,将内胆外壳1套装在仓库固定杆座10上,并通过微控制器7给第一电动伸缩锁紧杆12下达指令,使得第一电动伸缩锁紧杆12插入仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的锁紧,当需要将储物内胆放置到物流机器人上时,将物流机器人的机器人固定杆座11插入内胆外壳1中,首先通过微控制器7给第一电动伸缩锁紧杆12下达指令,使得第一电动伸缩锁紧杆12缩出仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的松开,然后通过微控制器7给第二电动伸缩锁紧杆13下达指令,使得第二电动伸缩锁紧杆13插入机器人固定杆座11内,实现储物内胆在机器人固定杆座11上的锁紧,当需要将储物内胆再从物流机器人转移到仓库固定杆座10时,将内胆外壳1套装在仓库固定杆座10上,先通过微控制器7给第二电动伸缩锁紧杆13下达指令,使得第二电动伸缩锁紧杆13脱出机器人固定杆座11内,实现储物内胆在机器人固定杆座11上的松开,并通过微控制器7给第一电动伸缩锁紧杆12下达指令,使得第一电动伸缩锁紧杆12插入仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的锁紧。
32.为了保证储物内胆电源的衔接,应按如下进行设置:当储物内胆未放置到物流机器人上时,将内胆外壳1套装在仓库固定杆座10上,通过微控制器7给第一电动伸缩锁紧杆12下达指令,这时使用的电源为蓄电池9,使得第一电动伸缩锁紧杆12插入仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的锁紧,当锁紧后,微控制器7将蓄电池9供电更换为从仓库固定杆座10供电,蓄电池9为可充可放电电池,此时,蓄电池9也进行充电,当需要将储物内胆放置到物流机器人上时,将物流机器人的机器人固定杆座11插入内胆外壳1中,首先通过微控制器7将仓库固定杆座10供电切换为蓄电池9供电,给第一电动伸缩锁紧杆12下达指令,使得第一电动伸缩锁紧杆12缩出仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的松开,然后通过微控制器7给第二电动伸缩锁紧杆13下达指令,使得第二电动伸缩锁紧杆13插入机器人固定杆座11内,实现储物内胆在机器人固定杆座11上的锁紧,将蓄电池9供电切换为机器人固定杆座11供电,当需要将储物内胆再从物流机器人转移到仓库固定杆座10时,将内胆外壳1套装在仓库固定杆座10上,同理,先切换供电方式,通过微控制器7给第二电动伸缩锁紧杆13下达指令,使得第二电动伸缩锁紧杆13脱出机器人固定杆座11内,实现储物内胆在机器人固定杆座11上的松开,并通过微控制器7给第一电动伸缩锁紧杆12下达指令,使得第一电动伸缩锁紧杆12插入仓库固定杆座10内,实现储物内胆在仓库固定杆座10上的锁紧,并切换供电方式。
33.同样作为举例,而非限制,图5示例性提供了锁紧装置的另一种实现形式——机械连锁式锁紧装置,以期根据产品结构性需要或使用需求可以达到简化电控系统的效果。如
图所示,锁紧装置包括第一联动锁紧杆14、第二联动锁紧杆15、中间齿条杆16、固定齿条17、齿轮18和电动伸缩杆19;第一联动锁紧杆14的一端与仓库固定杆座10的锁紧孔配合,另一端与齿轮18的中心铰接;所述齿轮18与中间齿条杆16和固定齿条17齿轮配合,设置有为中间齿条杆16提供向内侧弹性力的弹性元件弹簧20,所述中间齿条杆16的内侧端与第二联动锁紧杆15上的下窄上宽的斜面配合,所述第二联动锁紧杆15的上部与固定设置与内胆外壳1上的电动伸缩杆19固定连接,所述第二联动锁紧杆15的下部与机器人固定杆座11的锁紧孔配合;第一联动锁紧杆14和中间齿条杆16均可在内胆外壳1内左右方向直线运行;同时在第一联动锁紧杆14和第二联动锁紧杆15与相配合的锁紧孔之间设置有电源插头插座结构实现储物内胆从仓库固定杆座10和机器人固定杆座11获取电源。根据该工作形式,当储物内胆未放置到物流机器人上时,将内胆外壳1套装在仓库固定杆座10上,内胆外壳1未套装在机器人固定杆座11上,中间齿条杆16在弹性元件的作用下在内侧位置,第一联动锁紧杆14在外侧位置,实现内胆外壳1与仓库固定杆座10的锁紧,微控制器7控制实现供电方式从蓄电池9到仓库固定杆座10的切换,当内胆外壳1套装在机器人固定杆座11上后,首先进行供电方式切换,微控制器7给电动伸缩杆19下达指令,电动伸缩杆19带动所述第二联动锁紧杆15向下,第二联动锁紧杆15的斜面使得中间齿条杆16向外侧运动,通过中间齿条杆16与固定齿条17、齿轮18的配合,使得第一联动锁紧杆14向外侧运动,实现内胆外壳1与仓库固定杆座10的松开,第二联动锁紧杆15的下部插入机器人固定杆座11的锁紧孔,实现储物内胆在机器人固定杆座11上的锁紧,然后进行供电方式的切换,当将储物内胆从物流机器人拆下时,将内胆外壳1套装在仓库固定杆座10时,供电方式切换,将电动伸缩杆19缩回,带动第二联动锁紧杆15向上,中间齿条杆16在弹性元件的作用下回到内侧位置,从而通过齿轮齿条配合带动第一联动锁紧杆14在外侧位置,实现内胆外壳1与仓库固定杆座10的锁紧后切换供电方式。
34.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。