技术特征:
1.一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,所述方法包括:对输入图像进行图像处理,得到剔除噪点后的二值化图像;对所述剔除噪点后的二值化图像中的直线,利用霍夫变换直线检测方法进行拟合,将拟合后得到的最大投票数对应的直线作为风机叶片主体的连线;对风机叶片主体的连线,利用直线的斜率得到风机叶片在图像中的旋转角度;对剔除噪点后的二值化图像,基于所述图像中的旋转角度进行欧式变换并裁剪目标区域,得到风机叶片整体部分图像;把风机叶片整体部分图像进行等分操作,得到风机叶片主体部分图像和机舱部分图像,并统计风机叶片主体部分的前景个数和机舱部分的前景个数;根据风机叶片主体部分和机舱部分的前景个数,进行风机朝向正反的判断;利用风机朝向正反的判断结果,输出最终的朝向角度值,整个风机定向流程结束。2.根据权利要求1所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,所述对输入图像进行图像处理,具体包括:s1:提取输入图像的亮度通道,统计该亮度通道下的灰度图的均值和标准差;s2:基于所述灰度图的均值和标准差,利用滑动窗对所述输入图像进行滤波操作,得到前背景分离的灰度图;s3:对所述前背景分离的灰度图利用大津法进行二值化处理,得到二值化处理后的灰度图;s4:对二值化处理后的灰度图进行形态学开闭运算处理,得到剔除噪点后的二值化图像。3.根据权利要求2所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,所述形态学开闭运算处理包括:使用形态学开运算对二值化处理后的灰度图中较小的离散区域进行剔除,使用形态学闭运算进一步对二值化处理后的灰度图中较大区域的缺口进行补齐。4.根据权利要求1所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,所述输入图像为无人机在风机正上方采集的俯视图。5.根据权利要求4所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,在对输入图像进行图像处理之前,所述方法还包括:首先对输入的风机正上方采集的俯视图进行俯仰角判断,如果与垂直方向的偏差在
±
10度以内,则判定为可用的俯视图,进入后续处理。6.根据权利要求1所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,所述进行欧式变换并裁剪目标区域的具体过程包括:以剔除噪点后的二值化图像的图像中心作为旋转中心,以上述步骤中的直线的斜率求得的旋转角度作为待旋转量,可以计算出对应的旋转矩阵;在所述旋转矩阵的作用下,对剔除噪点后的二值化图像进行欧式变换即可将图像中的风机主体由倾斜旋转为水平;对旋转后的二值图求取轮廓,并将最大轮廓对应矩形的全部水平区域进行裁剪并保存。7.根据权利要求1所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征
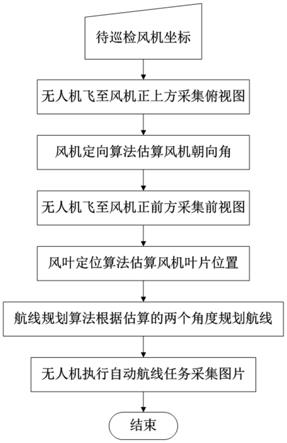
在于,所述进行风机朝向正反的判断具体包括:若风机叶片主体部分的前景个数比机舱部分的前景个数更大,则叶片在上、机舱在下,若风机叶片主体部分的前景个数比机舱部分的前景个数更小,则叶片在下、机舱在上,从而完成风机朝向正反的判断。8.根据权利要求1所述的一种用于无人机风机叶片自动巡检的风机定向方法,其特征在于,利用风机朝向正反的判断结果,输出最终的朝向角度值;具体包括:经过风机朝向的正反判断后,根据风机朝向的不同的指向决定是否加入180度的补偿,从而得到风机朝向与图像正方向的夹角β,其中,图像正方向与地理正北方向的夹角α可直接从图像属性中的云台偏航角读取,因此最终轮毂正方向相对于地理正北方向的夹角γ即为夹角α和夹角β之和,其中,最终朝向角隶属于(-180度~ 180度)区间;对最终朝向角进行修正,最终朝向角γ满足如下公式:
技术总结
本发明公开了一种用于无人机风机叶片自动巡检的风机定向方法,风机的真实朝向角可以得到快速准确的估算,已经应用于沽源、定边等多个风电场的无人机巡检作业中,其估算精度可达到1度以内,具有较强的实际应用价值。整个风机定向方法具有较强的场景适应性,能够适用于任意的风机朝向及叶片位置。相比于现有的基于激光雷达的风机定向方法,本发明具有操作简便、处理快速等优势。处理快速等优势。处理快速等优势。
技术研发人员:雍旭东
受保护的技术使用者:西安因诺航空科技有限公司
技术研发日:2021.12.09
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。