技术特征:
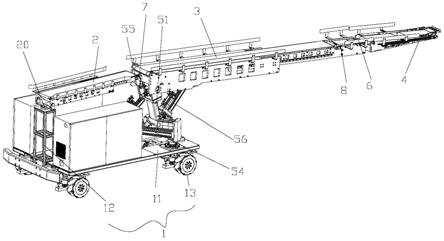
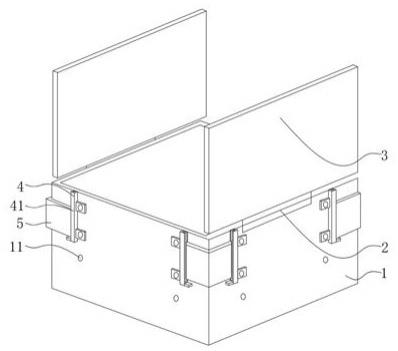
1.一种箱装货物自动装卸机器人,用于装卸箱装货物至输送带上,其特征在于:包括转运车(1)、转动安装在所述转运车(1)上的随动输送机构(2)、与所述随动输送机构(2)连接的大臂机构(3)以及与所述大臂机构(3)连接的小臂机构(4);所述小臂机构(4)包括:两相互平行相对设置的小臂侧板(40)、设置在两所述小臂侧板(40)前部之间的两相对设置的抓手导向板(41)、设置在两小臂侧板(40)后部之间的两相对设置的输送带安装板(42)、后输送带机构、前输送带机构和抓手机构;所述抓手导向板(41)的前端和后端分别具有倾斜向下的前坡段(411)和后坡段(412);所述抓手机构包括:两对称设置在所述小臂侧板(40)之间的四连杆机构、连接在两四连杆机构之间的吸盘支架(43)以及安装在所述吸盘支架(43)前端的多个吸盘(44);所述四连杆机构包括:滑架杆(45)、转动连接在所述滑架杆(45)后端的后摇杆(46)、转动连接在所述滑架杆前端的前摇杆(47)以及与所述后摇杆(46)和所述前摇杆(47)的端部均转动连接的连架杆(48);所述连架杆(48)的下端安装有导向轮(49),所述导向轮(49)沿所述抓手导向板(41)的上表面运动;所述吸盘支架(43)连接在所述连架杆(48)上,所述滑架杆(45)固定在前后移动的吸盘移动驱动同步带(410)上;所述前输送带机构和所述后输送带机构之间具有使所述吸盘(44)能够落下的吸盘避让间隙(413)。2.根据权利要求1所述的一种箱装货物自动装卸机器人,其特征在于:所述抓手导向板(41)和所述输送带安装板(42)之间具有容纳所述吸盘支架(43)落下的支架避让间隙(414)。3.根据权利要求1所述的一种箱装货物自动装卸机器人,其特征在于:所述抓手机构还包括:抓手移动电机(415)、安装在所述抓手移动电机(415)输出轴上的夹持主动带轮(416)、通过夹持同步带(417)与所述夹持主动带轮(416)连接的夹持从动带轮(418)、与所述夹持从动带轮(418)同轴安装的第一移动带轮(419)、转动安装在所述小臂侧板(40)前端的第二移动带轮(420);所述吸盘移动驱动同步带(410)套设在所述第一移动带轮(419)和所述第二移动带轮(420)上;所述滑架杆(45)通过同步带夹紧块(421)固定在所述吸盘移动驱动同步带(410)上。4.根据权利要求1所述的一种箱装货物自动装卸机器人,其特征在于:所述后输送带机构包括转动安装在所述输送带安装板(42)后端的第三动力滚筒(422)、安装在所述输送带安装架(42)前端的后输送带从动滚筒(423)以及套设在所述第三动力滚筒(422)和所述后输送带从动滚筒上(423)的后输送带(424)。5.根据权利要求1所述的一种箱装货物自动装卸机器人,其特征在于:所述前输送带机构包括:转动安装在所述抓手导向板后端的第四动力滚筒(425)、转动安装在所述小臂侧板(40)上的前输送带从动滚筒(426)以及套设在所述第四动力滚筒(425)和所述前输送带从动滚筒(426)上的前输送带(427)。6.根据权利要求1所述的一种箱装货物自动装卸机器人,其特征在于:所述转运车(1)包括车架底盘(11)、固定安装在所述车架底盘(11)上的支撑架(12)以及安装在所述车架底盘(11)四个角的麦克纳姆轮(13)。7.根据权利要求6所述的一种箱装货物自动装卸机器人,其特征在于:所述随动输送机构(2)包括:通过轴承转动安装在所述支撑架(12)上端的回转基座(20)、固定安装在所述回转基座(20)上的固定架(22)、滑动连接在所述固定架(22)上的活动架(23)、转动安装在所述固定架(22)上的第一动力滚筒(21)、安装在所述固定架(22)后端的第一档边从动滚筒
(24)、上下并列安装在所述活动架(23)前端的第二挡边从动滚筒(25)和第三挡边从动滚筒(26)、安装在所述活动架(23)后端的第四从动滚筒(27)、滑动安装在所述固定架(22)前端的第五从动滚筒(28)、设置在所述第一动力滚筒(21)两侧的第一导向辊(29)和第二导向辊(210);第一输送带(217)依次绕过第一动力滚筒(21)、第一导向辊(29)、第一挡边从动滚筒,然后绕至第一支撑面板(222)的上表面、第二支撑面板(231)的上表面、绕过第二挡边从动滚筒(25)、第三挡边从动滚筒(26)、第四从动滚筒(27)和第五从动滚筒(28),继续绕过第二导向辊(210)后绕至第一动力滚筒(21)上。8.根据权利要求7所述的一种箱装货物自动装卸机器人,其特征在于:所述大臂机构(3)包括:大臂主架板(30)、与所述大臂主架板(30)滑动连接的大臂延长板(31)、转动安装在所述大臂主架板(30)上的第二动力滚筒(32)、安装在所述大臂主架板(30)后端的第一大臂从动滚筒(33)、安装在所述大臂延长板(31)前部的第二大臂从动滚筒(34)和第三大臂从动滚筒(35)、安装在所述大臂延伸板后端的第四大臂从动滚筒(36)以及安装在所述大臂主架板(30)前端的第五大臂从动滚筒(37)、安装在所述大臂主架板(30)后部的第六大臂从动滚筒(38)以及转动安装在所述第二动力滚筒(32)两侧的第一大臂导向辊(39)和第二大臂导向辊(310);第二输送带(311)依次绕过第二动力滚筒(32)、第一大臂导向辊(39)、第一大臂从动滚筒(33)、第二大臂从动滚筒(34)、第三大臂从动滚筒(35)、第四大臂从动滚筒(36)、第五大臂从动滚筒(37)、第六大臂从动滚筒(38)和第二大臂导向辊(310)后绕至第二动力滚筒(32)上,形成一个总长度不变的闭环输送带。9.根据权利要求8所述的一种箱装货物自动装卸机器人,其特征在于:所述大臂主架板(30)上固定安装有大臂滑块(312)和大臂延伸调节齿条(313),大臂延长板(31)上固定安装有大臂滑轨(314)和大臂滑动驱动电机(315);所述大臂滑块(312)与所述大臂滑轨(314)相适配连接,所述大臂滑动驱动电机(315)的输出轴上同轴安装有大臂延伸调节齿轮(316),通过所述大臂延伸调节齿轮(316)与所述大臂延伸调节齿条(313)啮合传动实现大臂延长板(31)沿大臂主架板(30)的前后滑动。10.根据权利要求9所述的一种箱装货物自动装卸机器人,其特征在于:所述小臂机构(4)与所述大臂机构(3)通过二自由度关节(6)连接;所述二自由度关节(6)包括安装在所述大臂延长板(31)前端的关节驱动减速电机,所述关节驱动减速电机包括左关节驱动减速电机(61)和右关节驱动减速电机(62),所述关节驱动减速电机的输出端连接有主动凸轮(64),主动凸轮(64)的输出端连接在连杆(65)的后端,连杆(65)的前端连接在从动凸轮(63)的输入端,与从动凸轮(63)的连接的转轴上连接有主动锥齿轮,其中主动锥齿轮分为左主动锥齿轮(66)和右主动锥齿轮(67),装卸侧板(43)后端固定安装有小臂连接板(69),小臂连接板(69)上安装有从动锥齿轮(68),所述左主动锥齿轮(66)和所述右主动锥齿轮(67)在所述从动锥齿轮(68)的左右两侧与所述从动锥齿轮(68)啮合;其中左主动锥齿轮(66)和右主动锥齿轮(67)为规格相同的齿轮。
技术总结
本发明属于物流自动化设备技术领域,具体涉及一种箱装货物自动装卸机器人,包括转运车、随动输送机构、大臂机构以及与小臂机构;小臂机构包括:小臂侧板、抓手导向板、输送带安装板、后输送带机构、前输送带机构和抓手机构;抓手机构包括:四连杆机构、吸盘支架以及吸盘;前输送带机构和后输送带机构之间具有使吸盘能够落下的吸盘避让间隙。本发明通过吸盘抓取箱装货物的货箱后,利用吸盘移动驱动同步带带动货箱沿抓手导向板的上表面向后运动,吸盘运动至吸盘避让间隙内货箱的下方,以避让货箱。本发明结构设计合理,占用空间小且承载能力强,能够实现货箱的自动连续抓取。能够实现货箱的自动连续抓取。能够实现货箱的自动连续抓取。
技术研发人员:刘金 温帅雄 李浩 胡威 王洪波 石立宏 郭琪 关云彪 刘汉斌 朱振泽 王玉博 张宇
受保护的技术使用者:唐山海容机器人应用技术研究院
技术研发日:2020.10.29
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。