1.本实用新型属于纸芯片制备技术领域,具体涉及一种纸芯片水凝胶阀门的绘制装置。
背景技术:
2.纸芯片全称为纸基微流控分析设备(microfluidic paper-based analytical devices,μpads)或者纸芯片微流控(paper based microfluidics),自从2007年被研发出来以后,受到广泛关注。其相对于传统的微流控分析设备和微流控芯片具有成本低廉,易于储存,便于运输,操作简单等优势。近年来在食品检测,农药残留,环境检测等方面均有很好的商业化应用和前景。
3.使用纸芯片作为检测装置的载体时,往往需要在纸芯片的最前端绘制水凝胶阀门。现有技术中一般采用微流泵绘制水凝胶阀门,将点胶针头固定在微流泵上时,微流泵的移动精度可以精确到0.01 mm,但是其一次制备的海藻酸钠的区域长度《11 cm,移动距离太短,限制了一次实验制备的纸芯片的数量,不能满足制作大量纸芯片的要求。
技术实现要素:
4.针对上述技术问题,本实用新型提供一种纸芯片水凝胶阀门绘制装置。采用微流泵和点胶针头结合的方法,在纸带上绘制凝胶阀门,移动距离可以达到30 cm,一次实验制备的海藻酸钠条带长度可以满足制作大量纸芯片的要求。
5.本实用新型是通过以下技术方案实现的:
6.一种纸芯片水凝胶阀门的绘制装置,所述绘制装置包括写字机器人、微流泵、注射器针筒、四氟毛细管、鲁尔公接头和点胶针头;采用写字机器人和微流泵结合,能够控制点胶针头的移动速度以及溶液流速。
7.将所述注射器针筒固定在所述微流泵上,所述针筒中装有用于绘制水凝胶阀门的溶液;通过将针筒固定在微流泵能够实现溶液匀速流出;
8.将所述针筒的末端和所述四氟毛细管的一端连接,所述四氟毛细管的另一端和所述鲁尔公接头的一端连接,所述鲁尔公接头的另一端和所述点胶针头连接;所述点胶针头固定在所述写字机器人的悬臂上。
9.进一步地,在所述写字机器人的载物台上面放置一块工装。以使写字机器人的载物平台的平面度达到要求;
10.进一步地,用于制备纸芯片的纸张置于所述工装上,通过磁铁进行固定。
11.写字机器人的落笔机械臂将点胶针头和用于制备纸芯片的纸张的距离控制在一定距离(如1mm),进行移动绘制前,让溶液先行滴定一定时间,使得溶液流速稳定出液量均匀,在溶液流速稳定后进行在纸张上绘制水凝胶阀门。
12.进一步地,四氟毛细管材质为聚四氟乙烯ptfe,型号为:内径0.5mm,外径0.9mm;鲁尔公接头型号为1/16英寸,工程结构写字机器人型号为淳真 cz6890a。
13.本实用新型的有益技术效果:
14.本实用新型提供一种纸芯片水凝胶阀门绘制装置,采用写字机器人和微流泵结合的方式在纸带的特定区域添加水凝胶阀门,精度能够控制在0.05 mm min-1
,虽然精度不如微流泵,但是移动距离能够达到30 cm,在同一批水凝胶阀门制备完成后可以满足制作大量纸芯片的要求。
附图说明
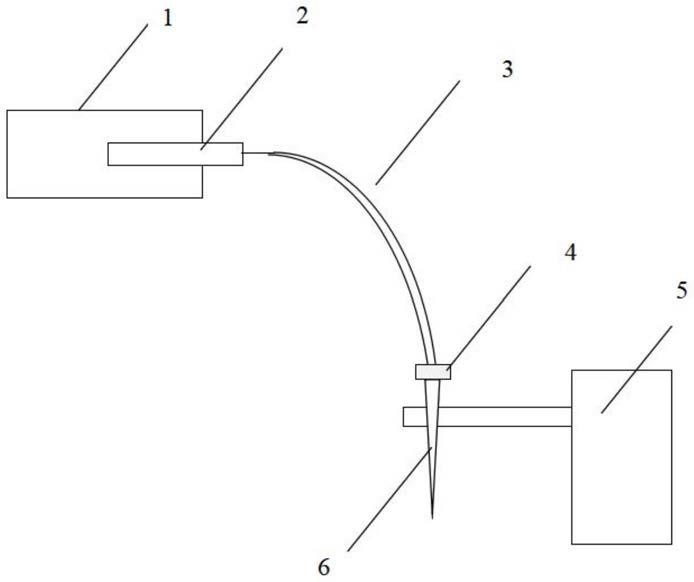
15.图1为本实用新型实施例中一种纸芯片水凝胶阀门绘制装置结构示意图;
16.附图标记:1.微流泵;2.注射器针筒;3.四氟毛细管;4.鲁尔公接头;5.写字机器人;6.点胶针头。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细描述。应当理解,此处所描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。
18.相反,本实用新型涵盖任何由权利要求定义的在本实用新型的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本实用新型有更好的了解,在下文对本实用新型的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本实用新型。
19.本实用新型实施例提供一种纸芯片水凝胶阀门的绘制装置,所述绘制装置包括写字机器人、微流泵、注射器针筒、四氟毛细管、鲁尔公接头和点胶针头;采用写字机器人和微流泵结合,能够控制点胶针头的移动速度以及溶液流速。
20.将所述注射器针筒固定在所述微流泵上,所述针筒中装有用于绘制水凝胶阀门的溶液;通过将针筒固定在微流泵能够实现溶液匀速流出;
21.将所述针筒的末端和所述四氟毛细管的一端连接,所述四氟毛细管的另一端和所述鲁尔公接头的一端连接,所述鲁尔公接头的另一端和所述点胶针头连接;所述点胶针头固定在所述写字机器人的悬臂上。
22.在本实施例中,在所述写字机器人的载物台上面放置一块工装。以使写字机器人的载物平台的平面度达到要求;
23.在本实施例中,用于制备纸芯片的纸张置于所述工装上,通过磁铁进行固定。
24.写字机器人的落笔机械臂将点胶针头和用于制备纸芯片的纸张的距离控制在一定距离(如1mm),进行移动绘制前,让溶液先行滴定一定时间,使得溶液流速稳定出液量均匀,在溶液流速稳定后进行在纸张上绘制水凝胶阀门。
25.在本实施例中,四氟毛细管材质为聚四氟乙烯ptfe,型号为:内径0.5mm,外径0.9mm;鲁尔公接头型号为1/16英寸,工程结构写字机器人型号为淳真 cz6890a。
26.采用上述实施例提供的绘制装置来制备水凝胶和微流控的ca
2
离子检测纸芯片的方法包括:
27.选取用于制备纸芯片的纸张;
28.在用于制备纸芯片纸张的特定区域绘制水凝胶阀门,所述水凝胶阀门是在纸张上
形成的海藻酸钠阻隔带,在海藻酸钠阻隔带上海藻酸钠均匀分布;
29.将含海藻酸钠阻隔带的纸张裁剪成规格一致的纸带;优选地,裁剪后纸带的宽度为2mm;
30.在纸带表面制备疏水层,以实现纸带表面疏水化,获得ca
2
离子检测纸芯片。
31.在本实施例中,绘制水凝胶阀门的方法包括:
32.1)配制质量分数为2%无氧海藻酸钠溶液;
33.优选地,所述无氧海藻酸钠溶液的制备方法为:1)将0.8g的海藻酸钠溶液添加到39.2g的去氧水中,90℃恒温震荡12小时,制得质量分数为2%的海藻酸钠溶液。2)将制备好的海藻酸钠溶液开盖放置于真空干燥箱,进行抽真空去氧1小时获得无氧海藻酸钠溶液。
34.2)控制点胶针头匀速均匀的将去氧海藻酸钠滴出;
35.3)在点胶针头能够匀速均匀地滴出海藻酸钠溶液后,控制点胶针头在纸张上匀速运动形成海藻酸钠阻隔带,以确保在同一条海藻酸钠阻隔带上任意相同面积区域内的海藻酸钠的量是相同的。
36.优选地,步骤3)中,采用写字机器人和微流泵结合,以控制点胶针头的移动速度以及溶液流速,具体为:
37.将无氧海藻酸钠溶液吸入注射器的针筒中,将针筒固定在微流泵上以实现无氧海藻酸钠溶液匀速流出,在针筒末端连接四氟毛细管,将鲁尔公接头的一端和所述四氟毛细管连接,将点胶针头和鲁尔公接头的另一端连接,最后将点胶针头固定在写字机器人悬臂上;优选地,用将四氟毛细管中间的部分固定以防止其在实验过程中晃动产生误差,具体地,可以将四氟毛细管穿过筒状的笔杆中,用胶水将两者固定或其他固定方式。
38.在写字机器人载物台上面放置一块制备高精度传感器的工装,以使写字机器人的载物平台的平面度达到要求;
39.将工装放置在写字机器人的载物平台之后,将纸张放置在工装上用磁铁进行固定,控制写字机器人的落笔机械臂将点胶针头和纸张的距离控制在一定距离(如1mm)进行移动绘制前,让溶液先行滴定一定时间,使得溶液流速稳定出液量均匀,在溶液流速稳定后进行在纸张上制备海藻酸钠阻隔带,完成水凝胶阀门的添加。
40.传统技术中,将点胶针头固定在微流泵上,移动速度可以精确到0.01 mm min-1
,但是移动速度上限很低,并且移动的距离也是有限的(小于11cm),限制了一次实验制备的纸芯片的数量。而在本实用新型中,采用写字机器人和微流泵结合的方式在纸带的特定区域添加水凝胶阀门,精度能够控制在0.05 mm min-1
,虽然精度不如微流泵,但是移动距离能够达到30 cm,在同一批水凝胶阀门制备完成后可以满足制作大量纸芯片的要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。