1.本发明涉及起升设备领域,具体涉及一种测力环及起重机。
背景技术:
2.本部分的描述仅提供与本发明公开相关的背景信息,而不构成现有技术。
3.现阶段,塔式起重机的重量限制大多是通过测量钢丝绳上的测力环形变而实现的。即:吊重加载后,测力环产生形变,导致其内部的弹片张开幅度变化,使得处于不同位置的轻触开关动作,输出载荷信号。
4.如图1所示,为现有技术中测力环的结构示意图。包括测力环本体、安装在测力环本体内的两个弹片,两个弹片均沿测力环本体的前后方向设置,且两个弹片分别向左右方向弯曲成一弧形,弹片上设置有检测器,该检测器通常为轻触开关,当左右两个拉环分别受到左右方向的拉力时,两个弹片之间的距离发生改变,通过测量两个弹片之间的距离,获得拉力的大小。
5.但是,如图1所示的测力环存在以下缺陷:(1)只能输出数个开关信号,不能连续输出重量信号,不便于控制系统的信号处理。(2)受温度影响比较大,当重量限制器在不同温度“热胀冷缩”的情况下,弹片张开量会变化,准确性不高。(3)使用接触式测量的方式,寿命较短,因触点的磨损、锈蚀、污染也会造成精度影响。
6.在公布号为cn2011998513u的专利文件中,公布了一种测力环,该测力环包括相互交叉的第一形变片和第二形变片,当该测力环收到拉力时,第一形变片和第二形变片之间的距离发生变化,通过对两个形变片的距离的测量,来计算测力环所测的拉力。但是,在该专利中,第一形变片和第二形变片的弯曲弧度朝向一致,这就导致测力环在受到拉力时,两个形变片的距离只能发生微小的改变,这就导致最终测量误差较大,测量结果不精确。
7.应该注意,上面对技术背景的介绍只是为了方便对本发明的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本发明的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现要素:
8.本发明要解决的技术问题是提供一种测力环及起重机。
9.为了解决上述技术问题,本发明提供了一种测力环,所述的测力环包括,环形的壳体,壳体的两端为受力端;第一弹片和第二弹片,交叉设置于所述的环形壳体内,所述的第一弹片和第二弹片为z字形弹片,所述的第一弹片包括第一旋转部、分别连接于第一旋转部两端的两个第一压缩部,所述的第二弹片包括第二旋转部、分别连接于第二旋转部两端的两个第二压缩部,所述的第一旋转部和第二旋转部相互交叉设置,两个第一压缩部的自由端部分别连接至所述壳体,两个第二压缩部的自由端部分别连接至所述的壳体。
10.优选地,所述的测力环还包括,检测装置,用于检测第一旋转部和第二旋转部之间的相对距离,或,用于检测第一旋转部和第二旋转部之间的相对角度,并根据所测的距离或
角度判断所述的壳体所受的拉力。
11.优选地,两个第一压缩部的自由端部通过焊接的方式固定连接至所述的壳体的内表面,两个第一压缩部与壳体的连接点的第一连线与壳体直径重合;两个第二压缩部的自由端部通过焊接的方式固定连接至所述的壳体的内表面,两个第二压缩部与壳体的连接点的第二连线与壳体的直径重合。
12.优选地,所述的第一连线和第二连线相互垂直,在不受外力作用下,所述的第一旋转部与第二旋转部相互垂直,且所述的第一旋转部与第二旋转部的交叉点为壳体的圆心,所述的第一压缩部与第一连线的夹角为15
°
~60
°
,所述的第二压缩部与第二连线的夹角为15
°
~60
°
。
13.优选地,当所述的壳体收到外力作用时,所述的第一旋转部与第二旋转部绕壳体的圆心旋转。
14.优选地,所述的第一旋转部与第二旋转部在交叉处通过一转轴相转动连接。
15.优选地,所述的壳体的两端设置有拉环,所述的拉环用于连接拉绳,所述的壳体的两个受力端所在直线与第二连线重合。
16.优选地,所述的第一旋转部和第二旋转部上分别设有第一检测点和第二检测点,所述的检测装置用于检测第一检测点和第二检测点之间的距离。
17.本技术还提供一种起重机,所述的起重机包括所述的测力环。
18.借由以上的技术方案,本发明的有益效果如下:
19.本发明的测力环及起重机,通过连续测量两个“z”字形弹片的交叉夹角来获取测力环的变形量。可以连续输出测力环所受力的大小。而现有技术中的方案使用微动开关感应两个弹片之间的距离,只能安装一个或多个微动开关,只能分段感应测力环所受到的力大小。另外,本技术的测力环具备温度补偿功能,测力环随温度变化膨胀或缩小时,两个“z”字形弹片中间相交的部分同步旋转,相对角度不变,可以补偿温度变化带来的测量偏差。两个“z”字形弹片相对角度测量,可以用电位器(电阻)方式、磁场(霍尔)方式,或者电磁感应方式。
附图说明
20.图1是现有技术中测力环的结构示意图。
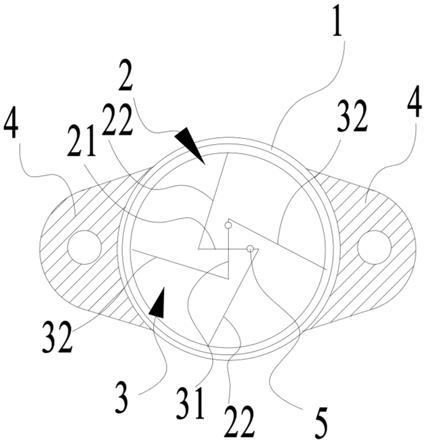
21.图2是本技术的测力环的结构示意图。
22.图3是本技术的测力环在温度升高时弹片的旋转方向示意图。
23.图4是本技术的测力环在受到拉力时弹片的旋转方向示意图。
24.其中:1’、测力环本体;2’、第一弹片;3’、第二弹片;4’、拉环;5’、检测器;1、壳体;2、第一弹片;3、第二弹片;4、拉环;5、检测点;21、第一旋转部;22、第一压缩部;31、第二旋转部;32、第二压缩部。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
26.需要说明的是,在本发明的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
27.如图2~4所示,为本技术的一种测力环,所述的测力环包括,环形的壳体1,壳体1的两端为受力端;第一弹片2和第二弹片3,交叉设置于所述的环形壳体1内,所述的第一弹片2和第二弹片3为z字形弹片,所述的第一弹片2包括第一旋转部21、分别连接于第一旋转部21两端的两个第一压缩部22,所述的第二弹片3包括第二旋转部31、分别连接于第二旋转部31两端的两个第二压缩部32,所述的第一旋转部21和第二旋转部31相互交叉设置,两个第一压缩部22的自由端部分别连接至所述壳体1,两个第二压缩部32的自由端部分别连接至所述的壳体1。所述的测力环还包括,检测装置,用于检测第一旋转部21和第二旋转部31之间的相对距离,或,用于检测第一旋转部21和第二旋转部31之间的相对角度,并根据所测的距离或角度判断所述的壳体1所受的拉力。本技术的测力环具备温度补偿功能,测力环随温度变化膨胀或缩小时,两个“z”字形弹片中间相交的部分同步旋转,相对角度不变,可以补偿温度变化带来的测量偏差。两个“z”字形弹片相对角度测量,可以用电位器(电阻)方式、磁场(霍尔)方式,或者电磁感应方式。
28.两个第一压缩部22的自由端部通过焊接的方式固定连接至所述的壳体1的内表面,两个第一压缩部22与壳体1的连接点的第一连线与壳体1直径重合;两个第二压缩部32的自由端部通过焊接的方式固定连接至所述的壳体1的内表面,两个第二压缩部32与壳体1的连接点的第二连线与壳体1的直径重合。当测力环收到外力时,外壳的形变能够最大程度的传至弹片,使得弹片发生最大的形变。
29.所述的第一连线和第二连线相互垂直,在不受外力作用下,所述的第一旋转部21与第二旋转部31相互垂直,且所述的第一旋转部21与第二旋转部31的交叉点为壳体1的圆心,所述的第一压缩部22与第一连线的夹角为15
°
~60
°
,所述的第二压缩部32与第二连线的夹角为15
°
~60
°
。当所述的壳体1收到外力作用时,所述的第一旋转部21与第二旋转部31绕壳体1的圆心旋转。在一种优选的实施方式中,所述的第一旋转部21与第二旋转部31在交叉处通过一转轴相转动连接。所述的第一旋转部21和第二旋转部31上分别设有第一检测点5和第二检测点5,所述的检测装置用于检测第一检测点5和第二检测点5之间的距离。所述的壳体1的两端设置有拉环4,所述的拉环4用于连接拉绳,所述的壳体1的两个受力端所在直线与第二连线重合。
30.如图4所示,本技术的测力环,在测力环受到拉力时,第一旋转部21逆时针绕圆心转动,第二旋转部31顺时针绕圆心转动,两个检测点5之间的距离发生变化,在一种优选的实施方案中,检测点5设置与旋转部的端部。由于检测点5距离壳体1圆心具有一段距离,因此,即使壳体1发生微小的形变,两个检测点5的距离也会发生较大的变化,通过检测两个检测点5之间的距离的方式来判断拉力的大小,得到的结果误差小,精度高。另外,本技术的两个弹片的设计,使壳体1发生的形变最大程度的传至弹片。
31.本技术还提供一种起重机,所述的起重机包括所述的测力环。本发明的测力环及起重机,通过连续测量两个“z”字形弹片的交叉夹角来获取测力环的变形量。可以连续输出测力环所受力的大小。
32.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。