1.本发明涉及地理测绘技术领域,具体为具有地形自适应自平衡机构的地理信息测绘装置及方法。
背景技术:
2.测绘学是研究地理信息的获取(测定、采集之意)、处理、描述和应用的一门科学。其内容包括:研究测定、描述地球的形状、大小、重力场、地表形态以及它们的各种变化,确定自然和人工物体、人工设施的空间位置及属性,制成各种地图(含地形图)和建立有关信息系统。现代测绘学的技术已部分应用于其它行星和月球上。
3.研究测定和推算地面点的几何位置、地球形状及地球重力场,据此测量地球表面自然形状和人工设施的几何分布,并结合某些社会信息和自然信息的地理分布,编制全球和局部地区各种比例尺的地图和专题地图的理论和技术学科。
4.在地理测绘的过程中,往往存在以下缺陷:
5.1、现有的地形测绘过程中,无法保持测绘仪器的平衡性。
6.2、现有的测绘仪器的无法自适应地形,调整平衡。
7.3、现有的设备往往稳定性较差。
8.针对这些缺陷,设计具有地形自适应自平衡机构的地理信息测绘装置及方法,是很有必要的。
技术实现要素:
9.本发明的目的在于提供具有地形自适应自平衡机构的地理信息测绘装置及方法,具有自适应调节平衡的优点,可以解决现有技术中的问题。
10.为实现上述目的,本发明提供如下技术方案:具有地形自适应自平衡机构的地理信息测绘装置及方法,包括第一测绘装置、第二测绘装置和测绘感应尺,所述测绘感应尺位于第一测绘装置和第二测绘装置的中间,所述第一测绘装置和第二测绘装置的上方均安装有防护罩,所述防护罩的上方安装有测量头外壳,所述测量头外壳的上端安装有激光测量器,且所述第一测绘装置和第二测绘装置的下方均安装有固定支架,所述固定支架设置有四个,且每两个固定支架之间均安装有升降架,所述升降架的下端一侧安装有调节脚座,所述第一测绘装置和第二测绘装置的内部中间均安装有转动筒。
11.优选的,所述测量头外壳的下端面安装有升降连接板,所述升降连接板的两侧均安装有活动调节臂,且所述测量头外壳的内部两侧和活动调节臂的内部中间均安装有调节马达,且调节马达与活动调节臂传动连接,且所述活动调节臂的一端安装有全角测距摄像头。
12.优选的,所述测量头外壳的内部两侧均安装有扬声器,且所述测量头外壳的内部中间安装有处理器模块,所述处理器模块的下方设置有无线传输模块,所述第一测绘装置的处理器模块与第二测绘装置的处理器模块之间通过无线传输模块相互连接。
13.优选的,所述激光测量器的外部两侧均安装有激光测量探头,所述激光测量器的内部两侧均安装有数据转换模块,所述激光测量器、环境检测装置和转动筒均通过数据转换模块与处理器模块电性连接,所述测绘感应尺的外表面两侧均设置有感应片,且所述测绘感应尺的下端安装有平衡底座,所述激光测量探头的位置与感应片的位置相互对应。
14.优选的,所述环境检测装置的外表面均设置有换气孔,所述环境检测装置的内部中间安装有风力检测传感器,且所述环境检测装置的下端安装有空气检测传感器,所述防护罩的外部两侧均安装有平衡检测传感器。
15.优选的,所述防护罩的下方与第一测绘装置和第二测绘装置固定连接,所述防护罩的内部安装有第三电动缸,所述第三电动缸的两侧均安装有滑板,且所述防护罩的上端两侧均设置有滑动口,且滑板穿过滑动口与防护罩滑动连接,所述第三电动缸的两端分别与防护罩和升降连接板固定连接。
16.优选的,所述第一测绘装置和第二测绘装置的下端两侧均安装有伺服电机,所述转动筒的两侧均安装有限位支板,所述限位支板的一侧安装有电动机,所述电动机与转动筒通过联轴器传动连接,所述转动筒的外部设置有激光感应器,所述激光感应器的外表面安装有激光发射口,所述第一测绘装置的激光发射口位置与第二测绘装置的激光发射口位置相互对应。
17.优选的,所述固定支架的内侧设置有滑动槽,所述滑动槽的内部安装有螺纹杆,所述电动机的下端与螺纹杆通过联轴器固定连接,所述固定支架的下端设置有定位轴套,所述螺纹杆的下端通过定位轴套与固定支架转动连接,所述升降架的两端均设置有移动块,所述移动块延伸至滑动槽内部与固定支架滑动连接,且所述移动块的内部设置有螺纹孔,所述移动块通过螺纹孔与螺纹杆螺纹连接,所述升降架的内部中间设置有活动槽,所述活动槽的下方安装有第一电动缸,所述第一电动缸的两端均通过连接耳分别与升降架和调节脚座活动连接,所述第一电动缸的一侧安装有第二电动缸,所述第二电动缸的两端均通过连接耳分别与第一电动缸的中间和固定支架的下端活动连接。
18.优选的,所述调节脚座的内部两侧均安装有移动轮,所述调节脚座的上端一侧安装有限位挡板,所述限位挡板与调节脚座设置为一体结构,且所述调节脚座的上端安装有电动马达,所述电动马达的下端安装有传动螺杆,所述传动螺杆的下端安装有定位钉,所述定位钉的两侧均安装有限位滑块,所述定位钉通过限位滑块与调节脚座滑动连接,所述传动螺杆的下端延伸至定位钉内部与定位钉螺纹连接。
19.具有地形自适应自平衡机构的地理信息测绘装置的测绘方法,包括如下步骤:
20.步骤一:将第一测绘装置和第二测绘装置放置在测绘位置,打开设备电源;
21.步骤二:根据平衡检测传感器感应第一测绘装置和第二测绘装置的位置,通过伺服电机带动螺纹杆转动,螺纹杆带动升降架上下移动,升降架带动第一电动缸移动,第一电动缸和第二电动缸伸缩,配合移动轮调节调节脚座的整体位置;
22.步骤三:根据平衡检测传感器将检测信息发送给处理器模块,处理器模块调整第一电动缸、第二电动缸和伺服电机,自动根据地形调整平衡;
23.步骤四:打开电动马达带动传动螺杆转动,传动螺杆带动定位钉下降,定位钉下降至地表面,与地面接触定位,保持稳定;
24.步骤五:位置稳定后,打开全角测距摄像头、激光测量器和激光感应器,通过测绘
感应尺外表面的感应片进行感应,进行测绘工作,第一测绘装置和第二测绘装置之间通过无线传输模块相互感应位置以及调整机构的位置,计算测绘数据。
25.与现有技术相比,本发明的有益效果如下:
26.1.本具有地形自适应自平衡机构的地理信息测绘装置及方法,根据平衡检测传感器感应第一测绘装置和第二测绘装置的位置,通过伺服电机带动螺纹杆转动,螺纹杆带动升降架上下移动,升降架带动第一电动缸移动,第一电动缸和第二电动缸伸缩,配合移动轮调节调节脚座的整体位置,根据平衡检测传感器将检测信息发送给处理器模块,处理器模块调整第一电动缸、第二电动缸和伺服电机,自动根据地形调整平衡,适应性好,可适合多种不同位置的地形,且通过移动轮可方便调节脚座进行滑动,根据位置不同,调整多个定位钉的位置,可使一侧的调节脚座进行移动,另一侧的调节脚座进行固定,进行调整位置,以达到最佳位置,调节角度广泛,适应性广,且自适应调节能力强,可提高测绘效率,有利于提高工作质量。
27.2.本具有地形自适应自平衡机构的地理信息测绘装置及方法,将第一测绘装置和第二测绘装置放置在测绘位置,打开设备电源,打开电动马达带动传动螺杆转动,传动螺杆带动定位钉下降,定位钉下降至地表面,与地面接触定位,保持稳定,提高设备的稳定效果,位置稳定后,打开全角测距摄像头、激光测量器和激光感应器,通过测绘感应尺外表面的感应片进行感应,进行测绘工作,第一测绘装置和第二测绘装置之间通过无线传输模块相互感应位置以及调整机构的位置,计算测绘数据,有利于提高工作效果。
附图说明
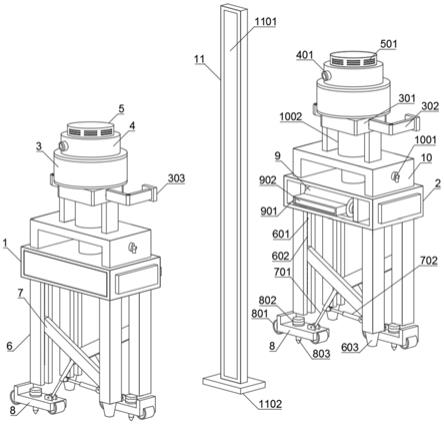
28.图1为本发明的整体主视图;
29.图2为本发明的转动筒和防护罩的结构示意图;
30.图3为本发明的固定支架的结构示意图;
31.图4为本发明的升降架的结构示意图;
32.图5为本发明的调节脚座的内部结构图;
33.图6为本发明的测量头外壳、激光测量器和环境检测装置的内部结构图。
34.图中:1、第一测绘装置;2、第二测绘装置;3、测量头外壳;301、升降连接板;302、活动调节臂;303、全角测距摄像头;304、处理器模块;305、扬声器;306、无线传输模块;4、激光测量器;401、激光测量探头;402、数据转换模块;5、环境检测装置;501、换气孔;502、风力检测传感器;503、空气检测传感器;6、固定支架;601、滑动槽;602、螺纹杆;603、定位轴套;7、升降架;701、第一电动缸;702、第二电动缸;703、移动块;704、活动槽;705、螺纹孔;8、调节脚座;801、移动轮;802、电动马达;803、定位钉;804、限位挡板;805、传动螺杆;806、限位滑块;9、转动筒;901、激光感应器;902、激光发射口;903、电动机;904、限位支板;905、伺服电机;10、防护罩;1001、平衡检测传感器;1002、第三电动缸;1003、滑动口;11、测绘感应尺;1101、感应片;1102、平衡底座。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参阅图1-6,具有地形自适应自平衡机构的地理信息测绘装置,包括第一测绘装置1、第二测绘装置2和测绘感应尺11,测绘感应尺11位于第一测绘装置1和第二测绘装置2的中间,第一测绘装置1和第二测绘装置2的上方均安装有防护罩10,防护罩10的上方安装有测量头外壳3,测量头外壳3的上端安装有激光测量器4,且第一测绘装置1和第二测绘装置2的下方均安装有固定支架6,固定支架6设置有四个,且每两个固定支架6之间均安装有升降架7,升降架7的下端一侧安装有调节脚座8,第一测绘装置1和第二测绘装置2的内部中间均安装有转动筒9,打开全角测距摄像头303、激光测量器4和激光感应器901,通过测绘感应尺11外表面的感应片1101进行感应,进行测绘工作,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据。
37.测量头外壳3的下端面安装有升降连接板301,升降连接板301的两侧均安装有活动调节臂302,且测量头外壳3的内部两侧和活动调节臂302的内部中间均安装有调节马达,且调节马达与活动调节臂302传动连接,且活动调节臂302的一端安装有全角测距摄像头303,打开全角测距摄像头303,进行全广角测量工作,通过调节马达可调整活动调节臂302,有利于适应不同环境。
38.测量头外壳3的内部两侧均安装有扬声器305,且测量头外壳3的内部中间安装有处理器模块304,处理器模块304的下方设置有无线传输模块306,第一测绘装置1的处理器模块304与第二测绘装置2的处理器模块304之间通过无线传输模块306相互连接,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据,有利于提高工作效果。
39.激光测量器4的外部两侧均安装有激光测量探头401,激光测量器4的内部两侧均安装有数据转换模块402,激光测量器4、环境检测装置5和转动筒9均通过数据转换模块402与处理器模块304电性连接,测绘感应尺11的外表面两侧均设置有感应片1101,且测绘感应尺11的下端安装有平衡底座1102,激光测量探头401的位置与感应片1101的位置相互对应,位置稳定后,打开全角测距摄像头303、激光测量器4和激光感应器901,通过测绘感应尺11外表面的感应片1101进行感应,进行测绘工作,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据。
40.环境检测装置5的外表面均设置有换气孔501,环境检测装置5的内部中间安装有风力检测传感器502,且环境检测装置5的下端安装有空气检测传感器503,防护罩10的外部两侧均安装有平衡检测传感器1001,通过风力检测传感器502和空气检测传感器503可检测出测绘环境的空气和风力,从而可提高功能性。
41.防护罩10的下方与第一测绘装置1和第二测绘装置2固定连接,防护罩10的内部安装有第三电动缸1002,第三电动缸1002的两侧均安装有滑板,且防护罩10的上端两侧均设置有滑动口1003,且滑板穿过滑动口1003与防护罩10滑动连接,第三电动缸1002的两端分别与防护罩10和升降连接板301固定连接,通过伸缩第三电动缸1002,可方便精度调节第一测绘装置1和第二测绘装置2的高度位置。
42.第一测绘装置1和第二测绘装置2的下端两侧均安装有伺服电机905,转动筒9的两侧均安装有限位支板904,限位支板904的一侧安装有电动机903,电动机903与转动筒9通过
联轴器传动连接,转动筒9的外部设置有激光感应器901,激光感应器901的外表面安装有激光发射口902,第一测绘装置1的激光发射口902位置与第二测绘装置2的激光发射口902位置相互对应,电动机903带动转动筒9转动,使得转动筒9的检测位置范围提高,可将第一测绘装置1的激光发射口902和第二测绘装置2的激光发射口902进行相互测量。
43.固定支架6的内侧设置有滑动槽601,滑动槽601的内部安装有螺纹杆602,电动机903的下端与螺纹杆602通过联轴器固定连接,固定支架6的下端设置有定位轴套603,螺纹杆602的下端通过定位轴套603与固定支架6转动连接,升降架7的两端均设置有移动块703,移动块703延伸至滑动槽601内部与固定支架6滑动连接,且移动块703的内部设置有螺纹孔705,移动块703通过螺纹孔705与螺纹杆602螺纹连接,升降架7的内部中间设置有活动槽704,活动槽704的下方安装有第一电动缸701,第一电动缸701的两端均通过连接耳分别与升降架7和调节脚座8活动连接,第一电动缸701的一侧安装有第二电动缸702,第二电动缸702的两端均通过连接耳分别与第一电动缸701的中间和固定支架6的下端活动连接,处理器模块304调整第一电动缸701、第二电动缸702和伺服电机905,自动根据地形调整平衡,适应性好,可适合多种不同位置的地形,且通过移动轮801可方便调节脚座8进行滑动,根据位置不同,调整多个定位钉803的位置,可使一侧的调节脚座8进行移动,另一侧的调节脚座8进行固定,进行调整位置,以达到最佳位置,调节角度广泛,适应性广,且自适应调节能力强,可提高测绘效率,有利于提高工作质量。
44.调节脚座8的内部两侧均安装有移动轮801,调节脚座8的上端一侧安装有限位挡板804,限位挡板804与调节脚座8设置为一体结构,且调节脚座8的上端安装有电动马达802,电动马达802的下端安装有传动螺杆805,传动螺杆805的下端安装有定位钉803,定位钉803的两侧均安装有限位滑块806,定位钉803通过限位滑块806与调节脚座8滑动连接,传动螺杆805的下端延伸至定位钉803内部与定位钉803螺纹连接,将第一测绘装置1和第二测绘装置2放置在测绘位置,打开设备电源,打开电动马达802带动传动螺杆805转动,传动螺杆805带动定位钉803下降,定位钉803下降至地表面,与地面接触定位,保持稳定,提高设备的稳定效果。
45.具有地形自适应自平衡机构的地理信息测绘装置的测绘方法,包括如下步骤:
46.步骤一:将第一测绘装置1和第二测绘装置2放置在测绘位置,打开设备电源;
47.步骤二:根据平衡检测传感器1001感应第一测绘装置1和第二测绘装置2的位置,通过伺服电机905带动螺纹杆602转动,螺纹杆602带动升降架7上下移动,升降架7带动第一电动缸701移动,第一电动缸701和第二电动缸702伸缩,配合移动轮801调节调节脚座8的整体位置;
48.步骤三:根据平衡检测传感器1001将检测信息发送给处理器模块304,处理器模块304调整第一电动缸701、第二电动缸702和伺服电机905,自动根据地形调整平衡,适应性好,可适合多种不同位置的地形,且通过移动轮801可方便调节脚座8进行滑动,根据位置不同,调整多个定位钉803的位置,可使一侧的调节脚座8进行移动,另一侧的调节脚座8进行固定,进行调整位置,以达到最佳位置,调节角度广泛,适应性广,且自适应调节能力强,可提高测绘效率,有利于提高工作质量;
49.步骤四:打开电动马达802带动传动螺杆805转动,传动螺杆805带动定位钉803下降,定位钉803下降至地表面,与地面接触定位,保持稳定,第一测绘装置1和第二测绘装置2
之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据,有利于提高工作效果;
50.步骤五:位置稳定后,打开全角测距摄像头303、激光测量器4和激光感应器901,通过测绘感应尺11外表面的感应片1101进行感应,进行测绘工作,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据。
51.综上,本具有地形自适应自平衡机构的地理信息测绘装置及方法,将第一测绘装置1和第二测绘装置2放置在测绘位置,打开设备电源,根据平衡检测传感器1001感应第一测绘装置1和第二测绘装置2的位置,通过伺服电机905带动螺纹杆602转动,螺纹杆602带动升降架7上下移动,升降架7带动第一电动缸701移动,第一电动缸701和第二电动缸702伸缩,配合移动轮801调节调节脚座8的整体位置,根据平衡检测传感器1001将检测信息发送给处理器模块304,处理器模块304调整第一电动缸701、第二电动缸702和伺服电机905,自动根据地形调整平衡,适应性好,可适合多种不同位置的地形,且通过移动轮801可方便调节脚座8进行滑动,根据位置不同,调整多个定位钉803的位置,可使一侧的调节脚座8进行移动,另一侧的调节脚座8进行固定,进行调整位置,以达到最佳位置,调节角度广泛,适应性广,且自适应调节能力强,可提高测绘效率,有利于提高工作质量,打开电动马达802带动传动螺杆805转动,传动螺杆805带动定位钉803下降,定位钉803下降至地表面,与地面接触定位,保持稳定,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据,有利于提高工作效果,位置稳定后,打开全角测距摄像头303、激光测量器4和激光感应器901,通过测绘感应尺11外表面的感应片1101进行感应,进行测绘工作,第一测绘装置1和第二测绘装置2之间通过无线传输模块306相互感应位置以及调整机构的位置,计算测绘数据。
52.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
53.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。