1.本发明涉及机械装置技术领域,尤其是指一种方壳篮筐提升机构、提升输送设备及方壳输送装置。
背景技术:
2.包装(packaging)是指为在流通过程中保护产品,方便储运,促进销售,按一定的技术方法所用的容器、材料和辅助物等的总体名称。
3.包装可以按照以下方式分类:(1)按包装在流通过程中的作用分:有单件包装、中包装和外包装等;(2)按包装制品材料分:有纸制品包装、塑料制品包装、金属包装、竹木器包装、玻璃容器包装和复合材料包装等;(3)按包装使用次数分:有一次用包装、多次用包装和周转包装等;(4)按包装容器的软硬程度分:有硬包装、半硬包装和软包装等;(5)按产品种类分:有食品包装、药品包装、机电产品设器包装、危险品包装等;(6)按功能分:有运输包装、贮藏包装和销售包装等。
4.由上述可知,现有的包装中没有针对冲压成型方壳设计的包装方式,极大增加了冲压成型方壳的运输难度。
技术实现要素:
5.针对现有技术的不足,本发明公开了一种方壳篮筐提升机构、提升输送设备及方壳输送装置。
6.本发明所采用的技术方案如下:
7.一种方壳篮筐,包括相互扣合的篮筐盖和筐体,所述篮筐盖的侧面设置扣合元件,所述扣合元件包括本体,所述本体的第一侧固定于篮筐盖,所述本体的第二侧弯折成型;所述扣合元件的第二侧扣合于所述筐体的顶部或底部。
8.一种方壳篮筐提升机构,用于输送上述所述的方壳篮筐,其包括
9.提升组件,包括第一同步输送模块和分离组件,所述第一同步输送模块运输所述方壳篮筐沿其长度方向平移;所述第一同步输送模块的固定部安装第二气缸,所述第二气缸用于抵紧所述扣合元件;所述分离组件包括第一气缸和第三气缸,所述第一气缸连接所述第三气缸,所述第一气缸推动所述三气缸升降,所述第三气缸用于夹取所述篮筐盖;
10.水平传输组件,包括第二同步输送模块和两组夹筐组件,两组夹筐组件均安装于移动架,所述第二同步输送模块运输所述移动架沿其长度方向平移;
11.所述夹筐组件包括第四气缸、第五气缸和夹筐支架;所述第四气缸通过连接板连接所述第五气缸,所述第四气缸推动所述连接板升降;所述第五气缸连接所述夹筐支架,所述第五气缸推动所述夹筐支架夹取所述筐体;
12.第一升降组件,包括第三电机、第一滚珠丝杆和升降台,所述第三电机的输出轴连接所述第一滚珠丝杆,所述第一滚珠丝杆的螺母和所述升降台固定连接,所述提升组件安装于所述升降台上。
13.其进一步的技术特征在于:所述第一同步输送模块包括第一电机、第一同步轮、第一同步带、第二同步轮和第一传动轴,所述第一电机的输出轴连接所述第一同步轮,所述第一同步带张紧于所述第一同步轮和所述第二同步轮上,所述第二同步轮穿过所述第一传动轴,所述第一传动轴的两端分别设置第三同步轮,所述第三同步轮通过第二同步带和第四同步轮传动连接。
14.其进一步的技术特征在于:所述第二同步输送模块包括第二电机、第五同步轮、第三同步带、第六同步轮、第二传动轴和传动模块,所述第二电机的输出轴连接所述第五同步轮,所述第三同步带张紧于所述第五同步轮和所述第六同步轮上,所述第六同步轮穿过所述第二传动轴,所述第二传动轴连接所述传动模块,所述传动模块和所述移动架相连。
15.其进一步的技术特征在于:所述传动模块包括一组第七同步轮和第四同步带,所述第四同步带张紧于所述一组第七同步轮之上,所述第七同步轮套设在所述第二传动轴的一端,同步夹紧块夹紧所述第四同步带,所述同步夹紧块固定于所述移动架上。
16.一种提升输送设备,包括上述所述的方壳篮筐提升机构。
17.其进一步的技术特征在于:还包括下料组件和上料组件,所述下料组件包括第一同步输送机构,所述上料组件包括第二同步输送机构,所述第一同步输送机构的长边所在直线和所述第二同步输送机构的长边所在直线相互平行,所述第一同步输送机构和所述第二同步输送机构均和所述方壳篮筐提升机构对接。
18.其进一步的技术特征在于:所述下料组件还包括顶升定位底板,所述顶升定位底板之上设置多个顶针,多个顶针按照m
×
n的矩阵方式排列,且m≥1,n≥1;所述顶升定位底板的底部连接顶升气缸的活塞杆。
19.一种方壳输送装置,包括上述所述的提升输送设备。
20.其进一步的技术特征在于:还包括三轴移栽机构和至少一个步进输送机构,所述步进输送机构沿其长度方向间歇输送方壳,所述三轴移栽机构夹取所述方壳输送至所述提升输送设备打包。
21.本发明的上述技术方案相比现有技术具有以下优点:
22.1、本发明能使冲压成型的方壳的运输过程较好地符合连续性、平行性、比例性以及均衡性的要求。
23.2、本发明组成空间输送线路,输送线路为是固定的,本发明的输送能力大,运距长,还可在输送过程中同时完成整理、分离篮筐盖和筐体及扣合篮筐盖和筐体的操作。
24.3、本发明用人少,实现无人化作业,以及符合流水节拍作业。
附图说明
25.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
26.图1是提升组件的第一视角的结构示意图。
27.图2是图1中a处的放大示意图。
28.图3是提升组件的第二视角的结构示意图。
29.图4是篮筐的结构示意图。
30.图5是提升组件和水平传输组件的第一视角的结构示意图。
31.图6是提升组件和水平传输组件的第二视角的结构示意图。
32.图7是方壳篮筐提升机构的侧视图。
33.图8是方壳篮筐提升机构的结构示意图。
34.图9是方壳篮筐提升机构的侧视图。
35.图10是步进输送机构的结构示意图。
36.图11是步进输送机构的俯视图。
37.图12是步进输送机构侧视图。
38.图13是三轴移栽机构的结构示意图。
39.图14是夹取组件的结构示意图。
40.图15是第二升降组件的结构示意图。
41.图16是第二升降组件的侧视图。
42.图17是方壳输送装置的结构示意图。
43.说明书附图标记说明:100、提升组件;101、第一电机;102、第一同步轮;103、第一同步带;104、第二同步轮;105、第一传动轴;106、第三同步轮;107、第二同步带;108、第一气缸;109、第二气缸;110、第三气缸;111、阻挡气缸;112、阻挡模组;200、水平传输组件;201、第二电机;202、第五同步轮;203、第三同步带;204、第六同步轮;205、第二传动轴;206、传动模块;300、第一升降组件;301、第三电机;302、第一滚珠丝杆;303、升降台;400、夹筐组件;401、第四气缸;402、连接板;403、第五气缸;404、夹筐支架;500、篮筐;501、篮筐盖;502、筐体;503、扣合元件;600、下料组件;601、第一同步输送机构;602、第六气缸;603、顶升定位底板;604、顶针;605、顶升气缸;700、上料组件;800、步进输送机构;801、动力源;802、输送架;803、机体;804、第七气缸;805、第八气缸;806、限位板;807、传动块;808、传动轮;809、传动带;810、主动轮;900、三轴移栽机构;901、第四电机;902、第八同步轮;903、第五同步带;904、第一夹紧块;905、第九同步轮;906、第一安装板;907、吸取模块;908、第一滑块;909、第一导轨;910、第一安装架;911、第五电机;912、第二滚珠丝杆;913、第二导轨;914、第二滑块;915、提升架;916、第二安装架;917、第二安装板;918、第十同步轮;919、第二夹紧块;920、第六电机;921、第六同步带;922、第十一同步轮。
具体实施方式
44.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
45.关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明,此外,在全部实施例中,相同的附图标号表示相同的元件。
46.结合图1-图6,一种方壳篮筐提升机构,用于输送方壳篮筐500,方壳篮筐500包括相互扣合的篮筐盖501和筐体502,筐体502用于收集冲压成型的方壳,篮筐盖501的侧面设置扣合元件503,扣合元件503包括本体,本体的第一侧固定于篮筐盖501,本体的第二侧弯折成型。扣合元件503的第二侧扣合于筐体502的顶部或底部。
47.方壳篮筐提升机构2包括提升组件100,包括第一同步输送模块和分离组件,第一
同步输送模块运输方壳篮筐沿其长度方向平移。第一同步输送模块的一侧固定部安装第二气缸109,第二气缸109用于抵紧扣合元件503。第一同步输送模块的另一侧固定部安装阻挡气缸111,阻挡气缸111的活塞杆推动阻挡模块112限制方壳篮筐的移动。
48.分离组件包括第一气缸108和第三气缸110,第一气缸108连接第三气缸110,第一气缸108推动三气缸110升降,第三气缸110用于夹取篮筐盖501。
49.水平传输组件200,包括第二同步输送模块和两组夹筐组件400,两组夹筐组件400均安装于移动架,第二同步输送模块运输移动架沿其长度方向平移。
50.夹筐组件400包括第四气缸401、第五气缸403和夹筐支架404。第四气缸401通过连接板402连接第五气缸403,第四气缸401推动连接板402升降。第五气缸403连接夹筐支架404,第五气缸403推动夹筐支架404夹取筐体502。
51.第一升降组件300,包括第三电机301、第一滚珠丝杆302和升降台303,第三电机301的输出轴连接第一滚珠丝杆302,第一滚珠丝杆302的螺母和升降台303固定连接,提升组件100安装于升降台303上。
52.第一同步输送模块包括第一电机101、第一同步轮102、第一同步带103、第二同步轮104和第一传动轴105,第一电机101的输出轴连接第一同步轮102,第一同步带103张紧于第一同步轮102和第二同步轮104上,第二同步轮104穿过第一传动轴105,第一传动轴105的两端分别设置第三同步轮106,第三同步轮106通过第二同步带107和第四同步轮传动连接。
53.第二同步输送模块包括第二电机201、第五同步轮202、第三同步带203、第六同步轮204、第二传动轴205和传动模块206,第二电机201的输出轴连接第五同步轮202,第三同步带203张紧于第五同步轮202和第六同步轮204上,第六同步轮204穿过第二传动轴205,第二传动轴205连接传动模块206,传动模块206和移动架相连。
54.传动模块206包括一组第七同步轮和第四同步带,第四同步带张紧于一组第七同步轮之上,第七同步轮套设在第二传动轴205的一端,同步夹紧块夹紧第四同步带,同步夹紧块固定于移动架上。
55.结合图7-图9,一种提升输送设备,包括方壳篮筐提升机构、下料组件600和上料组件700,下料组件600包括第一同步输送机构601,上料组件700包括第二同步输送机构,第一同步输送机构601的长边所在直线和第二同步输送机构的长边所在直线相互平行,第一同步输送机构601和第二同步输送机构均和方壳篮筐提升机构对接。
56.下料组件600还包括顶升定位底板603,顶升定位底板603之上设置多个顶针604,多个顶针604按照m
×
n的矩阵方式排列,且m≥1,n≥1。相邻两个顶针604之间的间隔放置一个方壳。顶升定位底板603的底部连接顶升气缸605的活塞杆。
57.下料组件600还包括第六气缸602,第六气缸602设置在顶升定位底板603的一侧,防止方壳从下料组件600掉落。
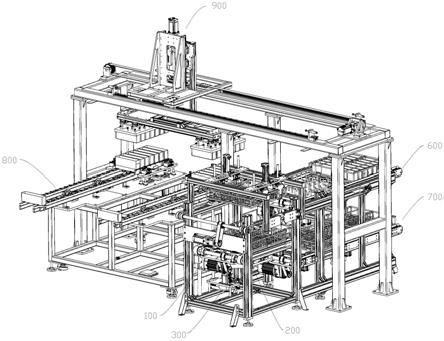
58.结合图10-图17,一种方壳输送装置,包括提升输送设备、三轴移栽机构900和两个步进输送机构800,两个步进输送机构800的长边所在直线相互平行,步进输送机构800沿其长度方向间歇输送方壳,三轴移栽机构900夹取方壳输送至提升输送设备打包。
59.具体地,步进输送机构800包括动力源801、输送架802和机体803,输送架802安装于机体803的内侧,且输送架802上开设多个凹槽,每个凹槽放置一个方壳。动力源801包括伺服电机,伺服电机的输出轴连接主动轮810,传动带809张紧于主动轮810和传动轮808上,
主动轮810和传动轮808之间可设置多个惰轮用于传递动力,传动轴的一端套设传动轮808,传动轴的另一端套设传动块807,传动块807固定于输送架802上。伺服电机的输出轴驱动主动轮810转动,主动轮810将动力通过传动带809传递给传动轮808,传动轮808带动传动块807往返摆动,传动块807使得输送架802向前运动、输送方壳。
60.机体803的终端设置第七气缸804,第七气缸804的活塞杆连接固定板,固定板之上安装第八气缸805,第八气缸805的活塞杆连接限位板806,第七气缸804的活塞杆推动固定板升降,第八气缸805的活塞杆推动限位板806前进整理机体803上的方壳。
61.三轴移栽机构900包括两组夹具,每组夹具包括第一安装板906,第一安装板906安装多个吸取模块907,多个吸取模块907按照a
×
b的矩阵方式排列,且a≥1,b≥1。第一安装板906和至少一个第一滑块908连接,第一滑块908和第一导轨909相互嵌合。第一导轨909固定于第一安装架910。本实施例中,第一安装板906安装21个吸取模块907,21个吸取模块907按照7
×
3的矩阵方式排列,每组夹具的三个吸取模块907同时吸取7个方壳。
62.两个传动模组,传动模组包括第一固定支架和第一夹紧块904,第一夹紧块904固定第一固定支架之上,第一固定支架固定于第一安装板906之上。
63.第一驱动模块,包括第四电机901、第八同步轮902、第五同步带903和第九同步轮905,第四电机901的端盖安装于第一安装架910上,第五同步带903张紧于第八同步轮902和第九同步轮905上,第四电机901的输出轴连接第八同步轮902,第一夹紧块904夹紧第五同步带903。启动第一驱动模块,第四电机901的输出轴驱动第八同步轮902转动,第八同步轮902通过第五同步带903传递动力给第九同步轮905,带动第九同步轮905转动,第一夹紧块904带动两组夹具相对靠近或相对远离。
64.吸取模块907包括气管接头、连接杆、单向阀和真空吸盘。连接杆的一侧连通气管接头,连接杆的另一侧连通单向阀,单向阀的一侧安装真空吸盘。吸取模块907适用于有油、有水、易污染真空系统的场合,用于吸取表面光滑密封的产品,例如方壳。该吸取模块907的工作原理如下:吸料时吸取模块907下压,排空真空吸盘内空气,单向阀密闭闭合,吸住方壳。放料时通过气管接头注入微量空气破真空,单向阀打开,真空吸盘放料。该吸取模块907的设置的有益效果如下:节省真空发生器无需真空,不需要实用压缩空气源,节省电磁阀,不会污染真空系统。
65.三轴移栽机构900还包括提升机构和方壳夹取机构,提升机构包括提升架915,提升架915连接成型冲压板件夹取机构,驱动成型冲压板件夹取机构升降。
66.提升机构还包括第二驱动模块,第二驱动模块包括第五电机911,第五电机911的输出轴连接第二滚珠丝杆912,第二滚珠丝杆912的螺母连接导轨安装板,导轨安装板和提升架915固定连接。启动第二驱动模块,第五电机911的输出轴驱动第二滚珠丝杆912旋转,第二滚珠丝杆912将回转运动转化为直线运动,带动提升架915升降,提升架915的升降带动夹取机构升降。
67.导轨安装板的背面固定第二滑块914,第二滑块914和第二导轨913相互嵌合。
68.三轴上下料装置还包括龙门架和移动机构,移动机构安装于龙门架上,移动机构包括第三驱动模块,第三驱动模块驱动提升机构水平往复运动。
69.第三驱动模块包括第六电机920、第十同步轮918、第六同步带921和第十一同步轮922,第六电机920的端盖固定于第二安装板917之上,第二安装板917固定于第二安装架916
上,第六同步带921张紧于第十同步轮918和第十一同步轮922之上,第六电机920的输出轴连接第十一同步轮922。第二夹紧块919夹紧第六同步带921,且第二夹紧块919连接提升机构。启动第三驱动模块,第六电机920的输出轴驱动第十一同步轮922转动,第十一同步轮922通过第六同步带921将动力传递第十同步轮918,带动第十同步轮918转动,第二夹紧块919带动提升机构水平移动。
70.移动机构还包括导向模块,导向模块包括相互嵌合的第三导轨和第三滑块,第三滑块和提升机构固定连接。第三导轨沿龙门架的长度方向设置。
71.本发明的工作原理如下:
72.步骤s1:冲压成型的方壳进入步进输送机构800,步进输送机构800沿其长度方向间歇输送方壳,将方壳输送至三轴移栽机构900处。
73.步骤s2:三轴移栽机构900沿x轴或y轴或z轴运动,从而夹取方壳,将方壳输送至下料组件600处。
74.步骤s3:上料组件700将空的方壳篮筐500从上料组件700的起始端传输至上料组件700的结束端,此时,篮筐盖501扣合于筐体502的底部。
75.步骤s4:提升组件100承接上料组件700的来料,启动第一气缸108、第二气缸109、第三气缸110和第一升降组件300,第二气缸109抵紧扣合元件503,并且第三气缸110夹紧篮筐盖501,同时第一升降组件300将筐体502上升输送至夹筐组件400处,夹筐组件400夹紧筐体502,第三气缸110和夹筐组件400将篮筐盖501和筐体502分离。
76.步骤s5:筐体502通过夹筐组件400夹紧,并通过水平输送组件200输送至下料组件600的起始端处,多个方壳放置在筐体502内。
77.步骤s6:篮筐盖501通过夹筐组件400夹紧,并通过水平输送组件200输送至筐体502处,此时,篮筐盖501扣合于筐体502的顶部,通过下料组件600运输处下料组件600的结束端,完成对方壳的包装下料。
78.在本发明实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
79.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。