技术特征:
1.一种基于分块逼近rbf滑模控制的水下机械臂控制方法,其特征在于:包括如下步骤:s1、水下机械臂动力学建模:s11、水下机械臂在水中受到的力分别为水流对静止机械臂的冲击力和机械臂在静水中运动时所受的作用力,根据流体力学,物体单位长度在静水中运动时的受到的作用力可以描述为:s12、morison方程给出了水阻力和附加质量力的微分计算公式:s13、将双关节水下机械臂关节在水中受到的水作用力矩归纳为t
w
:t
w
=[t1 t
′1 t
″
1 t2 t
′2 t
″2]
ꢀꢀꢀ
(11);假设双关节水下机械臂各关节连杆的重心与浮心的位置重合,且重力受与浮力的作用力方向相反,求得机械臂各连杆的等效重力:根据式(12)与重力矩阵g求得双关节水下机械臂的等效重力矩阵g
′
:根据公式(11)和公式(13)结合双关节水下机械臂的传统动力学方程式求得水下机械臂在水环境中的动力学模型:s2、水下机械臂控制器设计:s21、传统滑模控制:定义滑模函数为:其中,q
d
是机械臂关节运动的目标角度,q是实际角度,e(t)和是跟踪误差和误差的变化率;
对式(15)进行求异得:将式(14)中项按下式进行拆分:采用指数趋近律结合式(15)和式(17)得到传统滑模控制器的控制率:其中m
′
=m m
w
,c
′
=c c
w
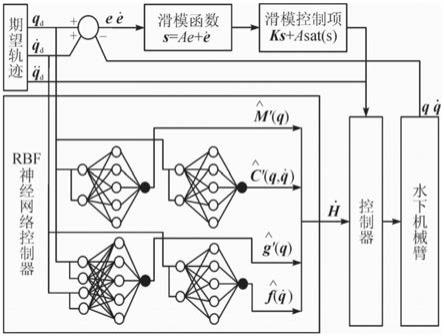
;s22、分块逼近rbf滑模控制:使用四个rbf神经网络组成rbf神经网络控制器对式(20)中的系数矩阵进行分块逼近,再结合滑模控制算法设计水下机械臂控制器,各rbf神经网络的输入分别为:rbf神经网络控制器的各网络隐含层均包含五个神经元,神经元内部算子均为gauss核函数:其中c
i
为第i个神经元的中心矢量,b
i
为神经元的基宽度;各个rbf神经网络的自适应律分别为:各个rbf神经网络的自适应律分别为:其中,f
m
′
、f
c
′
、f
g
′
与f
f
均为正定矩阵;rbf神经网络控制器的输出为rbf神经网络控制器的输出为式中:式中:根据并使用饱和函数sat(s)代替传统滑模控制律中的符号函数sgn(s),得到新的控制律为:式中:k为控制系数矩阵,a为大于0的常数,ks asat(s)用于消除外部干扰τ
d
与神经网络控制器的输出误差δ;s23、稳定性分析:
定义正定的lyspunov函数l:对lyspunov函数l进行求导可得:根据lagrange动力学方程特性可知为斜对称矩阵,并将式(26)至式(29)所给出的自适应律变换后带入式(33)可得:对式(34)进行分析,矩阵k、c
w
与m
w
均存在最小特征值;当时,有:当a≥(||δ|| ||τ
d
||)时,有:s
t
(τ
d-asat(s) δ)≤0
ꢀꢀꢀꢀ
(36);满足上述条件时,根据lyapunov稳定性判定理论,控制系统满足闭环渐进稳定条件,控制系统稳定。2.根据权利要求1所述的一种基于分块逼近rbf滑模控制的水下机械臂控制方法,其特征在于:式(2)中,f
d
、f
m
、f
f
和f
l
分别为水阻力、附加质量力、浮力和升力。3.根据权利要求1所述的一种基于分块逼近rbf滑模控制的水下机械臂控制方法,其特征在于:式(3)中,ρ是水密度,d是连杆直径,a是连杆垂直于水流速度方向上的投影面积,v是与速度相关的函数,c
d
和c
m
是水阻力系数与附加质量力系数。4.根据权利要求1所述的一种基于分块逼近rbf滑模控制的水下机械臂控制方法,其特
征在于:双关节水下机械臂的传统动力学方程式为:其中q是双关节机械臂关节运动时的角度矩阵,和则分别是角速度和角加速度矩阵,m(q)是双关节机械臂的惯性矩阵,是向心力与科氏力和的矩阵,g(q)是重力矩阵,和τ
d
分别是摩擦力矩阵和未知的外部干扰矩阵,τ是关节驱动力矩阵。5.根据权利要求1所述的一种基于分块逼近rbf滑模控制的水下机械臂控制方法,其特征在于:根据公式(3)求得机械臂关节j1受到的力矩t1:其中c1=cosq1,c2=cosq2;根据式(3)求得机械臂关节j2受到的力矩t2:
技术总结
本发明公开了一种基于分块逼近RBF滑模控制的水下机械臂控制方法,包括如下步骤:S1、水下机械臂动力学建模;S2、水下机械臂控制器设计:S21、传统滑模控制;S22、分块逼近RBF滑模控制;S23、稳定性分析;本发明使用多个RBF神经网络对双关节水下机械臂动力学模型中的不确定参数进行分块逼近可以提高对实际模型的逼近速度,分块逼近RBF神经网络控制器相比于整体逼近RBF神经网络控制器具有更好逼近效果。本发明相比于传统滑模控制和整体逼近RBF滑模控制可以大幅缩短水下机械臂控制系统的响应时间,降低控制系统的最大稳态误差与平均稳态误差,并能够抑制控制系统的抖振效应,实现良好的控制效果。的控制效果。的控制效果。
技术研发人员:张丽红 赵伟 张伟
受保护的技术使用者:西安文理学院
技术研发日:2022.01.10
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。