1.本发明涉及水电站闸门的机械锁定装置设备领域,具体涉及一种通过闸门自身驱动锁定梁自动投退的装置。
背景技术:
2.在水利系统工程中,尤其是水电站为保证过流设备设施的安全运行,会定期对流道、水轮机、工作闸门等过流设备进行常规检修。因此一般在流道进水口和出水口部位均设置有挡水检修门,用于挡住上下游部位的江水,确保该流道线路的设备设施具备检修条件,以保证水利系统工程安全运行。而检修门正常工况下一般通过锁定梁支撑固定在孔口部位,当需要提落检修门时,需要将闸门机械锁定梁进行投入和退出操作,目前,对闸门锁定梁的主要操作方法是:一种是采取人工操作,该方法也是目前使用最普遍的操作方法,但该方法非常耗费人力,效率也非常低,且在闸门孔口操作存在安全隐患;一种是采用外部力量驱动锁定梁,如液压驱动锁定梁,电能驱动锁定梁等,该方法能实现锁定梁的自动投退,但该类方法相当于在孔口位置增加了一套驱动设备,给维护人员增加了不必要的维护工作,且锁定梁的投退工况使用频率非常低,如此增加一套设备,性价比不高;另外,闸门一般安装在室外,所以锁定梁的工作环境非常恶劣,如潮湿、烈日暴晒、低温等情况,在这样的环境中安装投退装置动力源驱动设备容易导致驱动设备系统发生故障,从而影响设备正常运行;另一种是外加配重块,通过杠杆的原理,在启门过程中,将锁定梁抬高退出锁定状态,但是再次需要将锁定梁投入运行时,则需要人工现场操作将锁定梁投入,该类方法能实现锁定梁的自动退出,但不能实现将锁定梁自动投入,自动化程度不高,不能满足自动投退这两个功能。
3.随着社会的发展,现代化的今天对设备的安全、方便、高效、自动化运行提出了更高的技术要求。因此,我们结合现场的工作情况,发明了一种通过闸门自身驱动锁定梁自动投退的辅助装置,该装置通过接受闸门自身的上行和下行运动,自动将对应的闸门锁定梁安全投入和退出,实现了锁定梁的全自动化运行,为闸门的智能化运行提供了有效的安全保障。
技术实现要素:
4.本发明目的在于克服上述不足,提供一种通过闸门自身驱动锁定梁自动投退的装置,能够通过闸门自身的上行和下行运动,自动将对应的闸门锁定梁安全投入和退出,实现了锁定梁的全自动化运行,为闸门的智能化运行提供了有效的安全保障。
5.本发明为解决上述技术问题,所采用的技术方案是:一种通过闸门自身驱动锁定梁自动投退的装置,包括设于闸门混凝土孔口边侧的锁定梁辅助投退装置,所述锁定梁辅助投退装置包括设于闸门混凝土孔口边侧的锁定梁移动轨道,所述锁定梁移动轨道与锁定
梁滑动配合,所述锁定梁侧部不同位置分别与投入机构和退出机构连接,所述投入机构用于将锁定梁投入到闸门的支撑耳板下侧,所述退出机构用于将锁定梁退出闸门的支撑耳板。
6.优选地,所述投入机构包括固定设于闸门边侧的投入驱动齿条,所述投入驱动齿条与投入齿轮啮合,所述投入齿轮通过第一单向棘轮机构与第一输入锥齿轮的第一旋转轴连接,所述第一输入锥齿轮与第一输出锥齿轮啮合,所述第一输出锥齿轮通过转轴与第一主动轮连接,所述第一主动轮通过第一传动链条与第一从动轮连接,所述第一传动链条下侧通过第一连接销与锁定梁侧部连接。
7.优选地,所述第一单向棘轮机构包括设于投入齿轮内环的多根第一棘爪,所述第一棘爪与第一棘轮配合,第一棘轮中心与第一旋转轴固定连接;所述第一棘爪与投入齿轮内环之间设有第一弹簧,所述投入齿轮的转轴通过轴承架设于第一基座一侧,所述第一旋转轴的转轴通过轴承架设于第一基座另一侧。
8.优选地,所述退出机构包括固定设于闸门边侧的退出驱动齿条,所述退出驱动齿条与退出齿轮啮合,所述退出齿轮通过第二单向棘轮机构与第二输入锥齿轮的第二旋转轴连接,所述第二输入锥齿轮与第二输出锥齿轮啮合,所述第二输出锥齿轮通过转轴与第二主动轮连接,所述第二主动轮通过第二传动链条与第二从动轮连接,所述第二传动链条下侧通过第二连接销与锁定梁侧部连接。
9.优选地,所述第二单向棘轮机构包括设于退出齿轮内环的多根第二棘爪,所述第二棘爪与第二棘轮配合,第二棘轮中心与第二旋转轴固定连接;所述第二棘爪与退出齿轮内环之间设有第二弹簧,所述退出齿轮的转轴通过轴承架设于第二基座一侧,所述第二旋转轴的转轴通过轴承架设于第二基座另一侧。
10.优选地,所述第二单向棘轮机构的第二棘轮可旋转方向和第一单向棘轮机构的第一棘轮可旋转方向相反,所述退出驱动齿条的高度高于投入驱动齿条的高度。
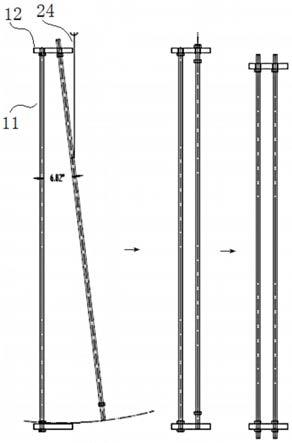
11.另外,本发明公开上述通过闸门自身驱动锁定梁自动投退的装置的使用方法,若闸门的支撑耳板在闸门锁定位h3高度时,包括以下步骤:步骤1):液压抓梁提升闸门时,闸门会带动退出驱动齿条以及投入驱动齿条同步上移;步骤2):退出驱动齿条上移并与退出齿轮接触配合,进而带动退出齿轮转动,退出齿轮转动并通过第一单向棘轮机构带动第一旋转轴转动,从而使得第一输入锥齿轮带动第一输出锥齿轮转动,最终使得第一主动轮通过第一传动链条带动第一从动轮转动;步骤3):第一传动链条移动时,使得锁定梁退出,当闸门的支撑耳板提升至停止退出位h2高度时, 液压抓梁停车,此时锁定梁退出至解锁位b处;步骤4):在上述步骤中,投入驱动齿条同步上移时并未接触到投入齿轮,不会使得投入齿轮转动,从而不会对锁定梁产生动作。
12.进一步地,当闸门的支撑耳板在停止退出位h2高度,锁定梁在解锁位b处时,包括以下步骤:步骤5):液压抓梁落下闸门,闸门会带动退出驱动齿条以及投入驱动齿条同步下移;步骤6):退出驱动齿条下移并与退出齿轮接触配合,但是由于第二单向棘轮机构
的第二棘轮可旋转方向和第一单向棘轮机构的第一棘轮可旋转方向相反,所以在退出齿轮转动时,并不会带动第二输入锥齿轮转动,从而不会对锁定梁产生动作;步骤7):当闸门底部下降至全关位h4高度后,抓梁显示重量<抓梁重量时,液压抓梁停车;步骤8):在上述步骤中,投入驱动齿条本身并未接触到投入齿轮,所以不会使得投入齿轮转动,从而不会对锁定梁产生动作。
13.本发明还公开上述通过闸门自身驱动锁定梁自动投退的装置的使用方法,若闸门底部位置在闸门全关位h4高度时,包括以下步骤:步骤a):液压抓梁提升闸门时,闸门会带动退出驱动齿条以及投入驱动齿条同步上移;步骤b):退出驱动齿条上移并与退出齿轮接触配合,进而带动退出齿轮转动,退出齿轮转动并通过第二单向棘轮机构带动第二旋转轴转动,从而使得第二输入锥齿轮带动第二输出锥齿轮转动,最终使得第二主动轮通过第二传动链条带动第二从动轮转动;步骤c):第二传动链条移动时,使得锁定梁退出,锁定梁会从解锁位b移动至二次退出位c,当闸门的支撑耳板提升至开始投入位h1高度时,液压抓梁停车;步骤d):在上述步骤中,当投入驱动齿条同步上移接触并与投入齿轮配合时,由于第二单向棘轮机构的第二棘轮可旋转方向和第一单向棘轮机构的第一棘轮可旋转方向相反,所以在投入齿轮转动时,并不会带动第一输入锥齿轮转动,从而不会对锁定梁产生动作。
14.进一步地,当闸门的支撑耳板在开始投入位h1高度,锁定梁处于二次退出位c处时,包括以下步骤:步骤e):液压抓梁下移闸门,闸门会带动退出驱动齿条以及投入驱动齿条同步下移;步骤f):投入驱动齿条下移并与投入齿轮接触配合,进而带动投入齿轮转动,投入齿轮转动并通过第一单向棘轮机构带动第一旋转轴转动,从而使得第一输入锥齿轮带动第一输出锥齿轮转动,最终使得第一主动轮通过第一传动链条带动第一从动轮转动;步骤g):第一传动链条移动时,使得锁定梁向锁定位a处移动,从而投入到闸门的支撑耳板下侧,此时闸门的支撑耳板下降至锁定位h3高度,抓梁显示重量<抓梁重量时,液压抓梁停车,液压抓梁停车;步骤h):在上述过程中,退出驱动齿条下移并与退出齿轮接触配合时,由于第二单向棘轮机构的第二棘轮可旋转方向和第一单向棘轮机构的第一棘轮可旋转方向相反,所以在退出齿轮转动时,并不会带动第二输入锥齿轮转动,从而不会对锁定梁产生动作。
15.本发明的有益效果:1、本发明能够通过闸门自身的上行和下行运动,自动将对应的闸门锁定梁安全投入和退出,实现了锁定梁的全自动化运行,为闸门的智能化运行提供了有效的安全保障;2、与现有技术对比,该自动投退的辅助装置,不需要增设外部动力源,可借助闸门自身的上下运行,从而带动锁定梁自动投退运行;3、该装置结构简单、成本低廉,能适应潮湿和室外各种恶劣的气候;4、该装置投入使用后,可以提高工作效率,降低劳动强度,降低人员孔口操作安全
风险,同时可节约人工劳动成本;5、本发明可用于水电站闸门机械锁定梁的投退工作,适用范围广泛,且通用性强、可重复使用,拥有广泛的应用前景。
附图说明
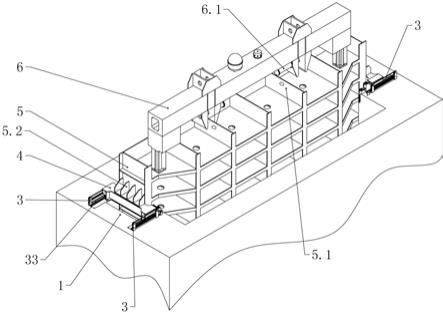
16.图1为一种通过闸门自身驱动锁定梁自动投退的装置的立体结构示意图;图2为图1中右侧区域的锁定梁辅助投退装置的立体结构示意图;图3为闸门与退出驱动齿条和投入驱动齿条之间的连接结构示意图;图4为第一单向棘轮机构与投入齿轮和第一旋转轴配合的结构示意图;图5为第二单向棘轮机构与退出齿轮和第二旋转轴配合的结构示意图;图6为台车移动至闸门混凝土孔口后的正视结构示意图;图7为图6中左侧锁定梁所在区域的放大结构示意图;图中,闸门混凝土孔口1、台车2、锁定梁辅助投退装置3、投入机构31、投入驱动齿条311、投入齿轮312、第一输入锥齿轮313、第一旋转轴314、第一输出锥齿轮315、第一主动轮316、第一传动链条317、第一从动轮318、第一连接销319、退出机构32、退出驱动齿条321、退出齿轮322、第二输入锥齿轮323、第二旋转轴324、第二输出锥齿轮325、第二主动轮326、第二传动链条327、第二从动轮328、第二连接销329、锁定梁移动轨道33、第一单向棘轮机构34、第一棘爪341、第一棘轮342、第一弹簧343、第二单向棘轮机构35、第一基座36、第二基座37、锁定梁4、闸门5、吊耳5.1、支撑耳板5.2、液压抓梁6、穿销销轴6.1。
具体实施方式
17.下面结合附图和具体实施例对本发明作进一步的详细描述。
18.如图1至5所示,一种通过闸门自身驱动锁定梁自动投退的装置,包括设于闸门混凝土孔口1边侧的锁定梁辅助投退装置3,所述锁定梁辅助投退装置3包括设于闸门混凝土孔口1边侧的锁定梁移动轨道33,所述锁定梁移动轨道33与锁定梁4滑动配合,所述锁定梁4侧部不同位置分别与投入机构31和退出机构32连接,所述投入机构31用于将锁定梁4投入到闸门5的支撑耳板5.2下侧,所述退出机构32用于将锁定梁4退出闸门5的支撑耳板5.2。
19.优选地,所述投入机构31包括固定设于闸门5边侧的投入驱动齿条311,所述投入驱动齿条311与投入齿轮312啮合,所述投入齿轮312通过第一单向棘轮机构34与第一输入锥齿轮313的第一旋转轴314连接,所述第一输入锥齿轮313与第一输出锥齿轮315啮合,所述第一输出锥齿轮315通过转轴与第一主动轮316连接,所述第一主动轮316通过第一传动链条317与第一从动轮318连接,所述第一传动链条317下侧通过第一连接销319与锁定梁4侧部连接。
20.优选地,所述第一单向棘轮机构34包括设于投入齿轮312内环的多根第一棘爪341,所述第一棘爪341与第一棘轮342配合,第一棘轮342中心与第一旋转轴314固定连接;所述第一棘爪341与投入齿轮312内环之间设有第一弹簧343,所述投入齿轮312的转轴通过轴承架设于第一基座36一侧,所述第一旋转轴314的转轴通过轴承架设于第一基座36另一侧。如图4所示,第一弹簧343为压缩状态,可以将第一棘爪341压紧在第一棘轮342表面。
21.优选地,所述退出机构32包括固定设于闸门5边侧的退出驱动齿条321,所述退出
驱动齿条321与退出齿轮322啮合,所述退出齿轮322通过第二单向棘轮机构35与第二输入锥齿轮323的第二旋转轴324连接,所述第二输入锥齿轮323与第二输出锥齿轮325啮合,所述第二输出锥齿轮325通过转轴与第二主动轮326连接,所述第二主动轮326通过第二传动链条327与第二从动轮328连接,所述第二传动链条327下侧通过第二连接销329与锁定梁4侧部连接。
22.优选地,所述第二单向棘轮机构35包括设于退出齿轮322内环的多根第二棘爪351,所述第二棘爪351与第二棘轮352配合,第二棘轮352中心与第二旋转轴324固定连接;所述第二棘爪351与退出齿轮322内环之间设有第二弹簧353,所述退出齿轮322的转轴通过轴承架设于第二基座37一侧,所述第二旋转轴324的转轴通过轴承架设于第二基座37另一侧。如图5所示,第二弹簧353为压缩状态,可以将第二棘爪351压紧在第二棘轮352表面。
23.优选地,所述第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所述退出驱动齿条321的高度高于投入驱动齿条311的高度。在本发明中,当退出驱动齿条321与退出齿轮322接触配合时,投入驱动齿条311与投入齿轮312不接触配合,而当投入驱动齿条311与投入齿轮312接触配合时,退出驱动齿条321与退出齿轮322不接触配合。可以这样具体设置退出驱动齿条321和投入驱动齿条311位置,当退出驱动齿条321底部刚好向上离开退出齿轮322时,此时投入驱动齿条311顶部才与投入齿轮312接触,这样便能保证退出驱动齿条321与退出齿轮322的接触配合过程与投入驱动齿条311与投入齿轮312对接触配合过程不在同一时间段,这样彼此才不会构成干扰。
24.如图6和7所示,本发明公开上述通过闸门自身驱动锁定梁自动投退的装置的使用方法,若闸门5的支撑耳板5.2在闸门锁定位h3高度时,包括以下步骤:步骤1:液压抓梁6提升闸门5时,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步上移;步骤2:退出驱动齿条321上移并与退出齿轮322接触配合,进而带动退出齿轮322转动,退出齿轮322转动并通过第一单向棘轮机构34带动第一旋转轴314转动,从而使得第一输入锥齿轮313带动第一输出锥齿轮315转动,最终使得第一主动轮316通过第一传动链条317带动第一从动轮318转动;步骤3:第一传动链条317移动时,使得锁定梁4退出,当闸门5的支撑耳板5.2提升至停止退出位h2高度时, 液压抓梁6停车,此时锁定梁4退出至解锁位b处;步骤4:在上述步骤中,投入驱动齿条311同步上移时并未接触到投入齿轮312,不会使得投入齿轮312转动,从而不会对锁定梁4产生动作。
25.进一步地,当闸门5的支撑耳板5.2在停止退出位h2高度,锁定梁4在解锁位b处时,包括以下步骤:步骤5:液压抓梁6落下闸门5,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步下移;步骤6:退出驱动齿条321下移并与退出齿轮322接触配合,但是由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在退出齿轮322转动时,并不会带动第二输入锥齿轮323转动,从而不会对锁定梁4产生动作;步骤7:当闸门5底部下降至全关位h4高度后,抓梁显示重量<抓梁重量时,液压抓
梁6停车;步骤8:在上述步骤中,投入驱动齿条311本身并未接触到投入齿轮312,所以不会使得投入齿轮312转动,从而不会对锁定梁4产生动作。
26.如图6和7所示,本发明还公开上述通过闸门自身驱动锁定梁自动投退的装置的使用方法,若闸门5底部位置在闸门全关位h4高度时,包括以下步骤:步骤a:液压抓梁6提升闸门5时,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步上移;步骤b:退出驱动齿条321上移并与退出齿轮322接触配合,进而带动退出齿轮322转动,退出齿轮322转动并通过第二单向棘轮机构35带动第二旋转轴324转动,从而使得第二输入锥齿轮323带动第二输出锥齿轮325转动,最终使得第二主动轮326通过第二传动链条327带动第二从动轮328转动;步骤c:第二传动链条327移动时,使得锁定梁4退出,锁定梁4会从解锁位b移动至二次退出位c,当闸门5的支撑耳板5.2提升至开始投入位h1高度时,液压抓梁6停车;步骤d:在上述步骤中,当投入驱动齿条311同步上移接触并与投入齿轮312配合时,由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在投入齿轮312转动时,并不会带动第一输入锥齿轮313转动,从而不会对锁定梁4产生动作。
27.进一步地,当闸门5的支撑耳板5.2在开始投入位h1高度,锁定梁4处于二次退出位c处时,包括以下步骤:步骤e:液压抓梁6下移闸门5,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步下移;步骤f:投入驱动齿条311下移并与投入齿轮312接触配合,进而带动投入齿轮312转动,投入齿轮312转动并通过第一单向棘轮机构34带动第一旋转轴314转动,从而使得第一输入锥齿轮313带动第一输出锥齿轮315转动,最终使得第一主动轮316通过第一传动链条317带动第一从动轮318转动;步骤g:第一传动链条317移动时,使得锁定梁4向锁定位a处移动,从而投入到闸门5的支撑耳板5.2下侧,此时闸门5的支撑耳板5.2下降至锁定位h3高度,抓梁显示重量<抓梁重量时,液压抓梁6停车,液压抓梁6停车;在投入驱动齿条311下移的过程中,由于是需要将处于二次退出位c处的锁定梁4移动至锁定位a处,a与c之间的距离是a与b之间距离的两倍,所以可设置投入驱动齿条311的长度为退出驱动齿条321长度的两倍。
28.步骤h:在上述过程中,退出驱动齿条321下移并与退出齿轮322接触配合时,由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在退出齿轮322转动时,并不会带动第二输入锥齿轮323转动,从而不会对锁定梁4产生动作。
29.具体地,本发明中的锁定梁辅助投退装置3应用到控制台车式起重设备操作闸门提落的方法的具体实施例如下:实施例1:如图6和7所示,一种控制台车式起重设备操作闸门提落的方法,它包括以下步骤:s1、用户登录:输入身份验证信息,在验证通过后,进入操作系统;
s2、确认操作机组号:选择需要操作的机组号,并确认操作;s3、台车2启动行走:在收到后台发出的“操作机组号”信号后,台车2的行走机构电机启动,向需要操作的机组号闸门行走;s4、台车2停车:当系统识别出机组定位信号后,台车2停车;s5、液压抓梁6下降:在收到后台发出的“落抓梁”信号后,液压抓梁6开始下降;s6、通过系统判定,使得液压抓梁定位停车,具体地:系统判定:当锁定梁4处于锁定位a处时,闸门5的支撑耳板5.2被锁定梁4锁定,支撑耳板5.2所在高度为h3,设为闸门锁定位;当液压抓梁6下降至抓梁显示重量<抓梁重量时,表明液压抓梁6底部已接触闸门5顶部,液压抓梁6停车;s7、液压抓梁6穿销启泵:在收到后台发出的“抓梁穿销”信号后,液压抓梁6的穿销销轴6.1开始进入到闸门5的吊耳5.1内;s8、穿销到位停泵:液压抓梁6的穿销销轴6.1穿过闸门5的吊耳5.1并到位,然后停泵;s9、液压抓梁6提升闸门5并停车:在收到后台发出的“提升闸门”信号后,液压抓梁6上移并提升闸门5至相应高度后停止,在该提升过程中,锁定梁辅助投退装置3将根据现场实际情况,自动对锁定梁4进行投退操作;锁定梁辅助投退装置3对锁定梁4进行投退操作的过程为:若闸门5的支撑耳板5.2在闸门锁定位h3高度时,液压抓梁6提升闸门5,锁定梁辅助投退装置3会在闸门5提升过程中缓缓将锁定梁4退出,当闸门5的支撑耳板5.2提升至停止退出位h2高度时, 液压抓梁6停车,此时锁定梁4退出至解锁位b处;进一步地,其中锁定梁辅助投退装置3 的具体操作过程为:步骤1):液压抓梁6提升闸门5时,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步上移;步骤2):退出驱动齿条321上移并与退出齿轮322接触配合,进而带动退出齿轮322转动,退出齿轮322转动并通过第一单向棘轮机构34带动第一旋转轴314转动,从而使得第一输入锥齿轮313带动第一输出锥齿轮315转动,最终使得第一主动轮316通过第一传动链条317带动第一从动轮318转动;步骤3):第一传动链条317移动时,使得锁定梁4退出,当闸门5的支撑耳板5.2提升至停止退出位h2高度时, 液压抓梁6停车,此时锁定梁4退出至解锁位b处;步骤4):在上述步骤中,投入驱动齿条311同步上移时并未接触到投入齿轮312,不会使得投入齿轮312转动,从而不会对锁定梁4产生动作。
30.s10、液压抓梁6落下闸门5并停车:在收到后台发出的“下降落门”信号后,液压抓梁6下移并落下闸门5至相应高度后停止,在该落下过程中,锁定梁辅助投退装置3将根据现场实际情况,自动对锁定梁4进行投退操作;锁定梁辅助投退装置对锁定梁进行投退操作的过程如下:当闸门5的支撑耳板5.2在停止退出位h2高度,锁定梁4在解锁位b处时,液压抓梁6落下闸门5,锁定梁辅助投退装置3不会对锁定梁4产生任何动作,当闸门5底部下降至全关位h4高度后,抓梁显示重量<抓梁重量时,液压抓梁6停车;进一步地,锁定梁辅助投退装置3对锁定梁4进行投退操作的过程为:
步骤5):液压抓梁6落下闸门5,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步下移;步骤6):退出驱动齿条321下移并与退出齿轮322接触配合,但是由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在退出齿轮322转动时,并不会带动第二输入锥齿轮323转动,从而不会对锁定梁4产生动作;步骤7):当闸门5底部下降至全关位h4高度后,抓梁显示重量<抓梁重量时,液压抓梁6停车;步骤8):在上述步骤中,投入驱动齿条311本身并未接触到投入齿轮312,所以不会使得投入齿轮312转动,从而不会对锁定梁4产生动作。
31.s11、液压抓梁6退销启泵:在收到后台发出的“抓梁退销”信号后,液压抓梁6的穿销销轴6.1开始离开闸门5的吊耳5.1;s12、退销到位停泵:液压抓梁6的穿销销轴6.1离开闸门5的吊耳5.1并到位,然后停泵;s13、液压抓梁6提升:在收到后台发出的“抓梁提升”信号后,液压抓梁6开始提升;s14、液压抓梁6停车:系统判定,液压抓梁6提升高度到位,停车;s15、台车2启动行走:在收到后台发出的“台车返回基站”信号后,台车2的行走机构电机启动,并向台车停车基站行走;s16、台车2停车:当系统识别出基站定位信号后,台车2停车。
32.实施例2:如图6和7所示,一种控制台车式起重设备操作闸门提落的方法,它包括以下步骤:s1、用户登录:输入身份验证信息,在验证通过后,进入操作系统;s2、确认操作机组号:选择需要操作的机组号,并确认操作;s3、台车2启动行走:在收到后台发出的“操作机组号”信号后,台车2的行走机构电机启动,向需要操作的机组号闸门行走;s4、台车2停车:当系统识别出机组定位信号后,台车2停车;s5、液压抓梁6下降:在收到后台发出的“落抓梁”信号后,液压抓梁6开始下降;s6、通过系统判定,使得液压抓梁6定位停车;系统判定,当锁定梁4处于解锁位b处时,闸门5位于闸门混凝土孔口1的最低位置,此时闸门5底部所在高度为h4,设为闸门全关位,当液压抓梁6下降至抓梁显示重量<抓梁重量时,表明液压抓梁6底部已接触闸门5顶部,液压抓梁6停车。
33.s7、液压抓梁6穿销启泵:在收到后台发出的“抓梁穿销”信号后,液压抓梁6的穿销销轴6.1开始进入到闸门5的吊耳5.1内;s8、穿销到位停泵:液压抓梁6的穿销销轴6.1穿过闸门5的吊耳5.1并到位,然后停泵;s9、液压抓梁6提升闸门5并停车:在收到后台发出的“提升闸门”信号后,液压抓梁6上移并提升闸门5至相应高度后停止,在该提升过程中,锁定梁辅助投退装置3将根据现场实际情况,自动对锁定梁4进行投退操作;锁定梁辅助投退装置3对锁定梁4进行投退操作的过程为:
若闸门5底部位置在闸门全关位h4高度时,液压抓梁6提升闸门5,锁定梁辅助投退装置3会在闸门5提升过程中缓缓将锁定梁4退出, 锁定梁4会从解锁位b移动至二次退出位c,当闸门5的支撑耳板5.2提升至开始投入位h1高度时,液压抓梁6停车。
34.进一步地,锁定梁辅助投退装置3的具体操作步骤如下:步骤a):液压抓梁6提升闸门5时,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步上移;步骤b):退出驱动齿条321上移并与退出齿轮322接触配合,进而带动退出齿轮322转动,退出齿轮322转动并通过第二单向棘轮机构35带动第二旋转轴324转动,从而使得第二输入锥齿轮323带动第二输出锥齿轮325转动,最终使得第二主动轮326通过第二传动链条327带动第二从动轮328转动;步骤c):第二传动链条327移动时,使得锁定梁4退出,锁定梁4会从解锁位b移动至二次退出位c,当闸门5的支撑耳板5.2提升至开始投入位h1高度时,液压抓梁6停车;步骤d):在上述步骤中,当投入驱动齿条311同步上移接触并与投入齿轮312配合时,由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在投入齿轮312转动时,并不会带动第一输入锥齿轮313转动,从而不会对锁定梁4产生动作。
35.s10、液压抓梁6落下闸门5并停车:在收到后台发出的“下降落门”信号后,液压抓梁6下移并落下闸门5至相应高度后停止,在该落下过程中,锁定梁辅助投退装置3将根据现场实际情况,自动对锁定梁4进行投退操作;锁定梁辅助投退装置3对锁定梁4进行投退操作的过程为:当闸门5的支撑耳板5.2在开始投入位h1高度,锁定梁4处于二次退出位c处时,锁定梁辅助投退装置3会在闸门5下降过程中缓缓将锁定梁4投入,当闸门5的支撑耳板5.2下降至锁定位h3高度后,锁定梁4处于锁定位a处,抓梁显示重量<抓梁重量时,液压抓梁6停车。
36.进一步地,其中锁定梁辅助投退装置3的具体操作过程如下:步骤e):液压抓梁6下移闸门5,闸门5会带动退出驱动齿条321以及投入驱动齿条311同步下移;步骤f):投入驱动齿条311下移并与投入齿轮312接触配合,进而带动投入齿轮312转动,投入齿轮312转动并通过第一单向棘轮机构34带动第一旋转轴314转动,从而使得第一输入锥齿轮313带动第一输出锥齿轮315转动,最终使得第一主动轮316通过第一传动链条317带动第一从动轮318转动;步骤g):第一传动链条317移动时,使得锁定梁4向锁定位a处移动,从而投入到闸门5的支撑耳板5.2下侧,此时闸门5的支撑耳板5.2下降至锁定位h3高度,抓梁显示重量<抓梁重量时,液压抓梁6停车,液压抓梁6停车;步骤h):在上述过程中,退出驱动齿条321下移并与退出齿轮322接触配合时,由于第二单向棘轮机构35的第二棘轮352可旋转方向和第一单向棘轮机构34的第一棘轮342可旋转方向相反,所以在退出齿轮322转动时,并不会带动第二输入锥齿轮323转动,从而不会对锁定梁4产生动作。
37.s11、液压抓梁6退销启泵:在收到后台发出的“抓梁退销”信号后,液压抓梁6的穿
销销轴6.1开始离开闸门5的吊耳5.1;s12、退销到位停泵:液压抓梁6的穿销销轴6.1离开闸门5的吊耳5.1并到位,然后停泵;s13、液压抓梁6提升:在收到后台发出的“抓梁提升”信号后,液压抓梁6开始提升;s14、液压抓梁6停车:系统判定,液压抓梁6提升高度到位,停车;s15、台车2启动行走:在收到后台发出的“台车返回基站”信号后,台车2的行走机构电机启动,并向台车停车基站行走;s16、台车2停车:当系统识别出基站定位信号后,台车2停车。
38.在上述实施例中,如需让起重机实现自动化运行,需要对该系统进行电气改造,能与5g智能终端匹配,具备接受远程操作功能的系统,同时增加台车自动行走定位系统,实现台车对检修闸门的精准定位,确保后续准确启闭检修门。其具体的实施方案如下:(1)5g技术:在现地设备安装物联网智能终端,5g基站和云平台,实现后台与现地设备的人机交流,确保提落门运行安全。
39.(2)台车自动行走定位:在台车上加装定位识别元件,并对闸门混凝土孔口进行物理标识,确保台车能精准行走至指定孔口位置,然后停车控制液压抓梁对闸门进行启闭操作。
40.(3)液压抓梁的自动定位:通过台车上的高度编码器,对液压抓梁进行高度定位,并与系统预设值进行比对,确保液压抓梁高度受控,当液压抓梁接近闸门时,液压抓梁6的液压泵启动,其穿销销轴6.1横向伸长并进入到闸门5的吊耳5.1内,确保液压抓梁6有效连接闸门5。
41.另外,上述方法中经常出现液压抓梁6下降至抓梁显示重量<抓梁重量,其解释如下:液压抓梁6本身的重量固定不变,为抓梁重量,而台车2与液压抓梁6的连接位置处设有对液压抓梁6进行称重的重量传感器,重量传感器反应的数值即为抓梁显示重量,当抓梁显示重量<抓梁重量时,说明液压抓梁6接触到闸门5顶部,所以导致其测出的抓梁显示重量变轻,通过上述过程可以判断液压抓梁6和闸门5的接触和分离状态。
42.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本技术中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。