1.本发明涉及极地水下机器人控制领域,更具体地说是一种基于图像码路标的水下机器人极地冰下视觉辅助导航方法。
背景技术:
2.目前水下机器人在水下主要通过自身携带的惯性导航系统进行航位推算,估计水下航行位置,由于惯导系统存在随时间增长的累计误差,为保持较高精度的水下导航,水下机器人需要定期上浮到水面,通过自身搭载的北斗或者gps进行绝对位置的校正。开展冰下探测的水下机器人,由于其作业海区被海冰覆盖,水下机器人航行过程中无法上浮到水面进行校准,限制了其水下作业的精确度和工作时间。
技术实现要素:
3.针对现有技术中存在的上述不足之处,本发明的目的在于,提升水下机器人在极地冰下的导航准确性,同时不增加极地冰上作业的工作量和维护保障难度。
4.为解决上述技术问题所采用的技术方案是:
5.一种基于图像码路标的水下机器人极地冰下视觉辅助导航方法,包括以下步骤:
6.步骤1:水下机器人在冰下返航过程中,通过高清摄像头观察周围环境、搜寻图像码路标;
7.步骤2:发现返航路线上的图像码后,采集图像码路标图像;
8.步骤3:对采集的图像进行识别处理,获取图像码路标信息;
9.步骤4:根据图像码图像估算距离该图像码的距离和方向;
10.步骤5:通过估计的图像码的距离和方向获得对应的图像码路标的位置信息,计算水下机器人当前的估计位置信息;
11.步骤6:若当前水下机器人自主导航的位置信息置信度低于当前由图像码估计的位置信息,则使用估计的位置信息,完成水下机器人航行位置的校正,否则更新水下机器人当前位置信息为图像码估计的位置信息,用于返航过程中的辅助导航。
12.所述图像码路标为若干个通过冰洞布放于冰下的图像码路标。
13.所述冰洞为通过冰钻在长期冰站上打通的直径不超过10cm的冰洞。
14.所述估算距离该图像码的距离为按照图像码图像的像素分辨率的缩放比例对距离进行估计。
15.所述图像码路标形状为球体或多面体,在球形或多面体的图像码路标上分别设有多个图像码图像。
16.所述图像码路标在冰下布放之后,从同一深度各个角度观察均可以识别确认图像码路标信息,包括id标号和方向标号。
17.所述球体或多面体的图像码路标信息均包含的基础信息:路标的id序号,对于多
面体图像码路标信息,还包括用于指示方向的对应面标号;所述的带有对应面标号的图像码路标,用于给水下机器人提供洞口方向信息,用于方向不准确或者无方向信息来源的冰下机器人航行控制。
18.所述的图像码路标id序号与路标的位置信息一一对应,并提前将唯一映射关系信息输入到水下机器人控制系统,水下机器人采集图像、识别图像码的id序号,从而对应出该路标的位置信息。
19.所述路标的呈现方式为二维码,或根据路标信息量多少,使用其他视觉路标形式:一维码,数字码。
20.一种基于图像码路标的水下机器人极地冰下视觉辅助导航系统,包括搭载在水下机器人本体上的高清摄像头、水下机器人控制器,图像码路标,所述高清摄像头用于拍摄图像码图像;所述水下控制器存储有程序,当加载程序时执行如上所述的方法步骤,识别拍摄图像码路标的位置和方向信息,从而定位机器人本体相对返航洞口的位置实现辅助导航。
21.本发明具有以下有益效果及优点:
22.本发明方法设计一种基于图像码路标的水下机器人极地冰下视觉辅助导航方法,可有效提升水下机器人在冰下的导航精度,为水下机器人冰下长期精准探测提供一种辅助手段。
附图说明
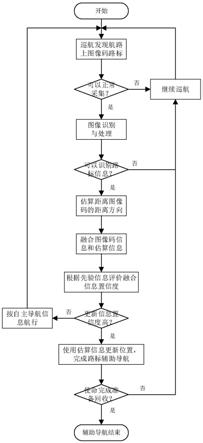
23.图1为本发明的基于图像码路标的水下机器人极地冰下视觉辅助导航流程图。
具体实施方式
24.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方法做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
25.除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
26.本发明涉及北极冰下科考用水下机器人技术领域。北极海冰及海洋环境变化对全球气候产生重大影响,通过水下机器人在冰下对海冰进行观测将对深刻理解北极海冰快速减退机制、提高我国北极前沿科学认知发挥重要作用。
27.北极冰下观测水下机器人为了得到海冰中心区域附近的观测信息,希望开展更大范围、更长时间的冰下观测。在极地试验过程中,支撑保障条件有限,水下机器人需要尽可能自主实现回收。因此长时间航行导航的准确性,对水下观测任务的执行至关重要。
28.本专利所述方法,只需要在任务执行之前在冰面上使用成熟的冰钻进行钻孔后布放辅助导航信标,在水下机器人正常航行过程中,通过自身搭载的高清相机,即可实现光学路标导航校准,不需要水面特殊保障,可以实现水下机器人长时间、大范围的冰下导航。
29.如图1所示,方法流程步骤包括:
30.步骤1:水下机器人在冰下航行过程中,通过高清摄像头观察航行路线和周围环
境;
31.步骤2:发现航行路线上的二维码之后,对二维码信息进行图像采集;
32.步骤3:对采集的图像进行识别处理,获取二维码路标的标号信息;
33.步骤4:可以识别二维码信息之后,根据二维码在摄像头中的位置,估算距离二维码的距离和方向;
34.步骤5:通过路标标号信息获得对应的二维码路标位置信息,结合步骤4估算的信息,得到水下机器人当前估算的位置信息;
35.步骤6:若当前水下机器人自主导航的位置信息置信度低于当前估算的位置信息,则使用估算的位置信息,完成水下机器人航行位置的校正。
36.通过在水下机器人回收洞口附近区域布设数个冰洞,可以采用通过冰钻在长期冰站上打通直径不超过10cm的细小冰洞,然后通过特布放缆绳或伸缩杆,经提前打好的冰洞布放冰下二维码路标。
37.二维码路标是球体或者六面体,二维码路标在冰下布放之后,可以使得水下机器人从同一深度各个角度观察均可以拍摄二维码图像,从而识别确认二维码路标信息。二维码路标信息包含的基础信息为路标的id序号。对于球体,通过在表面设置4-5张相同的二维码图像,对应于同一个路标的id序号。对于六面体等有指向性的路标,通过在前、后、左、右和下表面分别设置5张二维码图像,对应于同一个路标的id序号,以及五个方向的对应面的标号用于区分方向。带有对应面标号的二维码路标,可以给水下机器人提供洞口方向信息,可用于方向不准确或者无方向信息的冰下机器人航行控制。
38.二维码路标id序号与路标的位置信息是一一对应的,并提前将路标id序号与位置信息的唯一映射信息输入到水下机器人控制系统,水下机器人拍摄路标图像,识别二维码的id序号和对应面的标号、识别出对应出路标的位置信息和方向。
39.在冰上按照设定的几个远近位置距离,预先分别采集二维码图像,并进行图像像素近大远小的规律,标定距离与图像像素缩放比例的关系。根据水下机器人拍摄的二维码图像的像素分辨率的缩放比例对当期二维码路标的距离进行估计。
40.进一步的,路标的呈现方式主要为二维码,根据路标信息量多少,可以使用其他视觉路标形式,如一维码,数字码或者其他能识别的图像等。
41.综上所述,本发明给出了一种基于二维码路标的水下机器人极地冰下视觉辅助导航方法,可有效提升水下机器人在冰下的导航精度,为水下机器人冰下长期精准探测提供一种辅助手段。
42.以上所述是本发明的主要特征,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。