1.本发明涉及测量装置技术领域,尤其涉及一种用于多水草水域水深测量装置。
背景技术:
2.水草遮挡水面,影响水深的测量,尤其是生长密集根茎粗壮的水草,测量时,需要将待测水域的水草清除掉,在离岸边较远的水草不方便清理,而且清理不干净周边的水草又会重新覆盖住该水域。
3.因此,有必要提供一种新的用于多水草水域水深测量装置解决上述技术问题。
技术实现要素:
4.为解决上述技术问题,本发明提供一种用于多水草水域水深测量装置。
5.本发明提供的一种用于多水草水域水深测量装置,包括无人机、安装套、水草撑开装置、激光测量装置和围挡装置,所述安装套固定在无人机的底部,所述水草撑开装置包括底板、导向槽和撑开杆,所述安装套内壁的下端固定有底板,所述底板的中部位置等角度设有导向槽,所述撑开杆滑动连接在导向槽内,所述水草撑开装置还包括安装在安装套内壁用于驱动撑开杆沿着导向槽滑动的驱动装置,所述激光测量装置包括万向球轴承和激光测距仪,所述底板的底部中心固定连接有万向球轴承,所述万向球轴承的中心嵌入固定有激光测距仪,所述围挡装置转动连接在撑开杆下端的内壁,用于阻挡水草进入三个撑开杆所围成的区域内侧。
6.优选的,所述驱动装置包括安装架、电动机和转盘,所述安装套的内壁固定有安装架,所述安装架上表面的中部固定有电动机,所述电动机的输出轴固定有转盘,且转盘通过轴承与安装套的内壁转动连接,所述转盘的中部位置等角度设有弧形槽,且撑开杆的上端与与弧形槽的内壁滑动连接。
7.优选的,所述撑开杆外壁的上端固定有两个挡板,且两个挡板分别与转盘顶部和底板底部接触。
8.优选的,当撑开杆位于导向槽靠近安装套轴心的一端时,三个撑开杆相互接触。
9.优选的,当撑开杆位于导向槽靠近安装套轴心的一端时,三个撑开杆的下端组成一个圆柱形结构。
10.优选的,所述圆柱形结构的下端呈锥形。
11.优选的,所述安装套的底部边缘处固定有水草支撑环。
12.优选的,所述围挡装置包括收卷杆、阻挡布、涡卷弹簧和补偿装置,所述收卷杆通过轴承转动连接在撑开杆内壁的中部,且收卷杆的顶部贯穿撑开杆延伸至撑开杆的外侧,所述收卷杆下端的外壁固定有阻挡布,且阻挡布绕卷在收卷杆的外侧,所述阻挡布远离收卷杆的一端贯穿撑开杆与相邻的一个撑开杆的外壁固定,所述收卷杆处于撑开杆内侧部分的上端处固定有涡卷弹簧,所述涡卷弹簧远离收卷杆的一端与撑开杆的内壁固定,所述收卷杆的顶部固定有补偿装置。
13.优选的,所述补偿装置包括螺杆、齿轮、齿条和橡胶垫,所述收卷杆的顶部固定有螺杆,所述螺杆的外壁通过螺纹孔螺纹连接有齿轮,所述底板的底部对应齿轮的位置等距固定有齿条,所述齿轮与齿条相配合,所述螺杆下端的外壁固定有橡胶垫,所述齿轮的底部与橡胶垫的顶部挤压接触。
14.优选的,三个收卷杆上的三个齿轮处于不同平面内。
15.与相关技术相比较,本发明提供的用于多水草水域水深测量装置具有如下有益效果:
16.本发明能够完成水草较深的水域的水深测量工作,相较于传统的人工去除水草再进行测量的方法而言,不需要再通过人工拨开水草,从而便于人们完成水草较多水域的水深测量工作,由其能够完成较远水域的水深测量工作。
附图说明
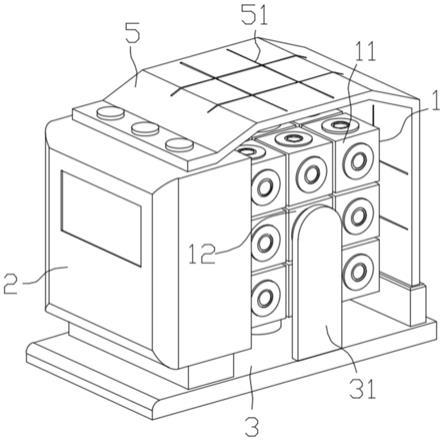
17.图1为本发明的整体结构示意图;
18.图2为本发明的水草撑装置结构示意图;
19.图3为本发明的a处放大图;
20.图4为本发明的驱动装置结构示意图之一;
21.图5为本发明的驱动装置结构示意图之二;
22.图6为本发明的补偿装置结构示意图;
23.图7为本发明的b处放大图;
24.图8为本发明的c处放大图;
25.图9为本发明的激光测量装置结构示意图;
26.图10为本发明的仰视结构示意图第一;
27.图11为本发明的d处放大图;
28.图12为本发明的仰视结构示意图第二;
29.图13为本发明的e处放大图;
30.图14为本发明的阻挡布位置结构示意图;
31.图15为本发明的齿轮分布结构示意图。
32.图中标号:1、无人机;2、安装套;3、水草撑开装置;31、撑开杆;a、圆柱形结构;32、底板;321、导向槽;33、驱动装置;331、安装架;332、电动机;333、转盘;334、弧形槽;4、激光测量装置;41、万向球轴承;42、激光测距仪;5、围挡装置;51、收卷杆;52、阻挡布;53、涡卷弹簧;54、补偿装置;541、螺杆;542、齿轮;543、齿条;544、橡胶垫;6、挡板;7、水草支撑环。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
34.以下结合具体实施例对本发明的具体实现进行详细描述。
35.请参阅图1、图2、图3和图9,本发明实施例提供的一种用于多水草水域水深测量装置,包括无人机1、安装套2、水草撑开装置3、激光测量装置4和围挡装置5,所述安装套2固定
在无人机1的底部,所述水草撑开装置3包括底板32、导向槽321和撑开杆31,所述安装套2内壁的下端固定有底板32,所述底板32的中部位置等角度设有导向槽321,所述撑开杆31滑动连接在导向槽321内,所述水草撑开装置3还包括安装在安装套2内壁用于驱动撑开杆31沿着导向槽321滑动的驱动装置33,所述激光测量装置4包括万向球轴承41和激光测距仪42,所述底板32的底部中心固定连接有万向球轴承41,所述万向球轴承41的中心嵌入固定有激光测距仪42,所述围挡装置5转动连接在撑开杆31下端的内壁,用于阻挡水草进入三个撑开杆31所围成的区域内侧。
36.需要说明的是,申请文件中提出的激光测距仪42为品牌为ruixingjia,其型号为klh-03t-20hz的激光测距模块。
37.还需要说明的是,能够完成水草较深的水域的水深测量工作,相较于传统的人工去除水草再进行测量的方法而言,不需要再通过人工拨开水草,从而便于人们完成水草较多水域的水深测量工作,由其能够完成较远水域的水深测量工作。
38.请参阅图4和图5,所述驱动装置33包括安装架331、电动机332和转盘333,所述安装套2的内壁固定有安装架331,所述安装架331上表面的中部固定有电动机332,所述电动机332的输出轴固定有转盘333,且转盘333通过轴承与安装套2的内壁转动连接,所述转盘333的中部位置等角度设有弧形槽334,且撑开杆31的上端与与弧形槽334的内壁滑动连接。
39.需要说明的是,用于驱动三个撑开杆31同时移动撑开,从而便于将水草撑开,保证测量不会受到水草的阻碍。
40.请参阅图5和图7,所述撑开杆31外壁的上端固定有两个挡板6,且两个挡板6分别与转盘333顶部和底板32底部接触,能够对撑开杆31进行定位,避免其上下移动,保证其只能够水平移动。
41.请参阅图1和图2,当撑开杆31位于导向槽321靠近安装套2轴心的一端时,三个撑开杆31相互接触,在三个撑开杆31闭合后,三个彼此接触,避免有水草会进入到三个撑开杆31之间,保证撑开杆31能够顺利穿过水草。
42.请参阅图1,当撑开杆31位于导向槽321靠近安装套2轴心的一端时,三个撑开杆31的下端组成一个圆柱形结构a。
43.请参阅图1,所述圆柱形结构a的下端呈锥形,便于圆柱形结构a能够顺利的插入到水草中。
44.请参阅图2,所述安装套2的底部边缘处固定有水草支撑环7,能够对水草进行阻挡,避免激光测量装置4嵌入水中影响测量效果。
45.请参阅图3、图10、图11、图12、图13和图14,所述围挡装置5包括收卷杆51、阻挡布52、涡卷弹簧53和补偿装置54,所述收卷杆51通过轴承转动连接在撑开杆31内壁的中部,且收卷杆51的顶部贯穿撑开杆31延伸至撑开杆31的外侧,所述收卷杆51下端的外壁固定有阻挡布52,且阻挡布52绕卷在收卷杆51的外侧,所述阻挡布52远离收卷杆51的一端贯穿撑开杆31与相邻的一个撑开杆31的外壁固定,所述收卷杆51处于撑开杆31内侧部分的上端处固定有涡卷弹簧53,所述涡卷弹簧53远离收卷杆51的一端与撑开杆31的内壁固定,所述收卷杆51的顶部固定有补偿装置54。
46.需要说明的是,通过设置的围挡装置5能够在三个撑开杆31撑开水草后,避免水草再次进入到三个撑开杆31所围成的区域内,保证水深测量工作不会被水草所阻碍。
47.请参阅图6、图7和图8,所述补偿装置54包括螺杆541、齿轮542、齿条543和橡胶垫544,所述收卷杆51的顶部固定有螺杆541,所述螺杆541的外壁通过螺纹孔螺纹连接有齿轮542,所述底板32的底部对应齿轮542的位置等距固定有齿条543,所述齿轮542与齿条543相配合,所述螺杆541下端的外壁固定有橡胶垫544,所述齿轮542的底部与橡胶垫544的顶部挤压接触。
48.需要说明的是,通过设置的补偿装置54在三个撑开杆31在撑开的过程中,能够保证阻挡布52始终保持绷紧的状态,避免其被水草顶开变形,
49.请参阅图15,三个收卷杆51上的三个齿轮542处于不同平面内,避免齿轮542的工作发生彼此阻碍。
50.本发明提供的用于多水草水域水深测量装置的工作原理如下:
51.在使用时,通过驱动无人机1飞行至水草上方,进而无人机1保持水平方向不动只进行竖直向下移动,从而将贴紧在一起的三个撑开杆31插入到水草内,直至撑开杆31贯穿水草,而后驱动无人机1悬停,进而驱动电动机332转动,带动转盘333转动,进而在转盘333上的弧形槽334和底板32上的导向槽321的配合作用下驱动三个撑开杆31向相互远离的方向移动,从而能够拉动阻挡布52从收卷杆51上拉出,而随着三个撑开杆31的距离逐渐增大,阻挡布52逐渐的从收卷杆51上拉出,而在阻挡布52放出的过程中会带动收卷杆51转动,收卷杆51转动能够拉紧涡卷弹簧53,直到三个撑开杆31到达最远极限距离时,此时阻挡布52全部放出,且在撑开杆31撑开过程中配合阻挡布52能够拨开水草,最后阻挡布52和撑开杆31所围成的区域内形成一片无水草的水面,进而通过设置的激光测距仪42测量水深,且由于激光测距仪42是安装在万向球轴承41上,而无论无人机1悬停时是否处于水平状态,在激光测距仪42自身的重力作用下,其始终能够保持竖直状态,从而保证水深测量的精确性;
52.而在三个撑开杆31撑开一定距离后,齿轮542即与齿条543接触并随着撑开杆31的移动而与齿条543啮合,而后撑开杆31继续移动,而此时在橡胶垫544的作用下能够使得收卷杆51转动放出阻挡布52时,收卷杆51会带动橡胶垫544转动,而橡胶垫544与齿轮542之间存在着一定的摩擦力,而由于涡卷弹簧53绕卷的初期没有较大的回弹力,而这个摩擦力能够补偿涡卷弹簧53初期较弱的回弹力,从而能够保证阻挡布52处于绷紧的状态,而随着撑开杆31的继续撑开,齿轮542在齿条543的带动下转动,且螺杆541在收卷杆51带动下转动,使得齿轮542沿着螺杆541向上移动,使得齿轮542压紧在橡胶垫544上的力逐渐减小,但是在撑开杆31撑开的后期涡卷弹簧53的回弹力就较大,同样能够保证阻挡布52处于紧绷的状态,从而使得收卷布始终处于紧绷的状态;
53.本发明能够完成水草较深的水域的水深测量工作,相较于传统的人工去除水草再进行测量的方法而言,不需要再通过人工拨开水草,从而便于人们完成水草较多水域的水深测量工作,由其能够完成较远水域的水深测量工作。
54.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
55.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。