1.本发明涉及三相并网逆变器控制技术领域,具体地,涉及一种无锁相环的三相并网逆变器控制方法及系统。
背景技术:
2.可再生能源发电已日益成为能源领域关注的焦点。作为可再生能源发电的关键设备,逆变器及其控制一直是该领域的技术热点。传统逆变器一般采用基于锁相环的逆变器并网控制方案,其优点在于响应动态较好,参数设计较容易。然而,基于锁相环的逆变器并网控制方案存在诸多问题。由于锁相环本身存在稳定性问题,已有相当多的文献表明锁相环的失稳是造成并网逆变器失稳的主要原因。此外,采用基于锁相环的逆变器并网控制方案需要测量逆变器网侧电压,这就需要在逆变器的输出端口额外增加电压传感器,势必加大了逆变器的复杂度和成本。
3.现有技术中,公开号为cn113517720a的中国发明专利,公开了一种弱电网下lcl并网逆变器分数相位补偿控制方法及设备,通过获取的并网电流信号分为两路,一路经过并网电流反馈有源阻尼抑制lcl并网逆变器的固有谐振峰,另一路与所述并网电流参考信号相减得到误差信号并传送至电流控制器进行调制。该发明尽管能够对并网电压相位进行补偿,但仍采用锁相环进行,且基于锁相环的并网逆变器对弱网不稳定的这一特质并没有因所提出的方法而改变。
4.公开号为cn113675886a的中国发明专利,公开了一种虚拟同步机转动惯量和阻尼系数协同自适应控制方法通过转动惯量和阻尼系数的协同控制使有功环节保持在欠阻尼状态。该发明采用虚拟同步机方案,但虚拟同步机方案由于功率环缺少0极点而无法实现对功率的精确跟踪。
技术实现要素:
5.针对现有技术中的缺陷,本发明提供一种无锁相环的三相并网逆变器控制方法及系统。
6.根据本发明提供的一种无锁相环的三相并网逆变器控制方法及系统,所述方案如下:
7.第一方面,提供了一种无锁相环的三相并网逆变器控制方法,所述方法包括:
8.功率计算与滤波步骤:测量三相相电流信号i
1,abc
与电压信号u
c,abc
,根据测量结果或使用其坐标变换值i
1,dq
和u
c,dq
计算有功功率与无功功率,将计算得到的有功功率与无功功率分别经过功率滤波器进行滤波处理;
9.功率同步步骤:将经过功率滤波器的有功功率与无功功率经pi调节器生成频率与电压参考信号;
10.电压电流控制步骤:根据生成的频率与电压参考信号,控制系统中硬件模块lcl滤波器机侧电感电流传感器与电容电压传感器;
11.pwm调制步骤:通过对电感电流传感器与电容电压传感器的控制,生成pwm波供驱动器驱动三相igbt桥。
12.优选地,所述功率计算与滤波步骤中,功率滤波器采用一阶惯性滤波器g
pf
(s),其传递函数形式为:
[0013][0014]
其中,tf表示功率滤波器时间常数;s表示拉普拉斯变换的拉氏算子。
[0015]
优选地,所述功率同步步骤中,有功功率pi调节器的时间常数小于功率计算与滤波步骤的时间常数,无功功率pi调节器的时间常数大于有功功率pi调节器时间常数。
[0016]
优选地,所述功率计算与滤波步骤时间常数大于系统中电压电流步骤时间常数10倍,有功功率pi调节器时间常数应小于功率计算与滤波步骤时间常数;
[0017]
对功率同步步骤比例系数进行单位归一化,归一化系数为k
unit
,各参数设定要求如下:
[0018][0019]
其中,和为归一化的比例增益,其数值一般为1~100;k
po
表示电压控制环比例增益;k
iql
表示无功环路积分增益;表示有功环路积分增益;k
io
表示电压控制环积分增益;表示无功环路比例增益;表示有功环路比例增益;k
unit
表示归一化系数;v
ref
表示控制电压参考;x
line
表示线路阻抗;x
l2
表示网侧滤波器电感对应阻抗。
[0020]
优选地,所述电压电流控制步骤具体包括:控制系统中硬件模块lcl滤波器机侧电感电流传感器与电容电压传感器,电流内环采用p控制,参数为k
pin
,电压外环采用pi控制,其传递函数形式为:
[0021][0022]gpi
(s)表示电压外环pi控制器传递函数。
[0023]
优选地,参考频率与坐标变换角度通过计算有功功率和无功功率获得,相应公式为:
[0024][0025]
其中,ω表示输出电压频率;p
ref
表示有功功率参考;表示经功率滤波器滤波后的实际输出有功;ω
ref
表示输出电压频率参考;θ表示dq变换角度;表示电容电压d轴分量控制给定;表示表示电容电压q轴分量控制给定;q
ref
表示无功功率参考;表示经功率滤波器滤波后的实际输出无功;v
ref
表示控制电压参考。
[0026]
第二方面,提供了一种无锁相环的三相并网逆变器控制系统,所述系统包括:
[0027]
功率计算与滤波模块:测量三相相电流信号i
1,abc
与电压信号u
c,abc
,根据测量结果或使用其坐标变换值i
1,dq
和u
c,dq
计算有功功率与无功功率,将计算得到的有功功率与无功功率分别经过功率滤波器进行滤波处理;
[0028]
功率同步模块:将经过功率滤波器的有功功率与无功功率经pi调节器生成频率与电压参考信号;
[0029]
电压电流控制模块:根据生成的频率与电压参考信号,控制系统中硬件模块lcl滤波器机侧电感电流传感器与电容电压传感器;
[0030]
pwm调制模块:通过对电感电流传感器与电容电压传感器的控制,生成pwm波供驱动器驱动三相igbt桥。
[0031]
优选地,所述功率同步步骤中,有功功率pi调节器的时间常数小于功率计算与滤波步骤的时间常数,无功功率pi调节器的时间常数大于有功功率pi调节器时间常数。
[0032]
与现有技术相比,本发明具有如下的有益效果:
[0033]
1、本发明不采用锁相环生成频率与坐标变换角度,从而避免了锁相环带来的不稳定问题。经仿真结果表明,本发明方案的功率调节超调量相对于锁相环方案下降了20%;
[0034]
2、本发明相对于基于锁相环的三相并网逆变器控制方案,在弱电网运行条件下下稳定性更强;
[0035]
3、本发明可无需测量逆变器网侧电压,从而节省逆变器网侧电压传感器的使用,降低设计负担;
[0036]
4、本发明主要为控制方法改进,可无需对主流逆变器拓扑进行大幅度改动。
附图说明
[0037]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0038]
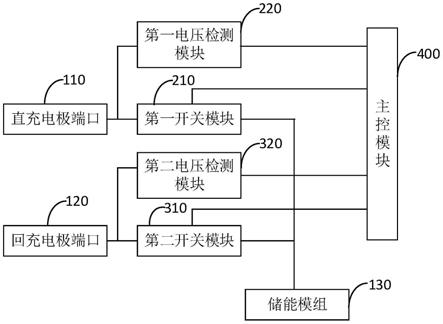
图1为本发明所对应的硬件部分结构图;
[0039]
图2为本发明所对应的软件部分结构图;
[0040]
图3为本发明仿真结构图;
[0041]
图4为本发明所对应的仿真结果图(输出有功功率曲线图);
[0042]
图5为本发明所对应的仿真结果图(频率曲线图);
[0043]
图6为采用锁相环的并网逆变器有功功率动态曲线图;
[0044]
图7为采用锁相环的并网逆变器频率动态曲线图。
具体实施方式
[0045]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0046]
本发明实施例提供了一种无锁相环的三相并网逆变器控制方法,参照图1和图2所示,该方法具体包括:
[0047]
功率计算与滤波步骤:测量三相相电流信号i
1,abc
与电压信号u
c,abc
,根据测量结果或使用其坐标变换值i
1,dq
和u
c,dq
计算有功功率与无功功率,将计算得到的有功功率与无功功率分别经过功率滤波器进行滤波处理。
[0048]
功率滤波器采用一阶惯性滤波器g
pf
(s),其传递函数形式为:
[0049][0050]
其中,tf表示功率滤波器时间常数;s表示拉普拉斯变换的拉氏算子。
[0051]
功率计算与滤波步骤时间常数大于系统中电压电流步骤时间常数10倍,有功功率pi调节器时间常数应小于功率计算与滤波步骤时间常数;
[0052]
对功率同步步骤比例系数进行单位归一化,归一化系数为k
unit
,各参数设定要求如下:
[0053][0054]
其中,和为归一化的比例增益,其数值一般为1~100;k
po
表示电压控制环比例增益;k
iql
表示无功环路积分增益;表示有功环路积分增益;k
io
表示电压控制环积分增益;表示无功环路比例增益;表示有功环路比例增益;k
unit
表示归一化系数;v
ref
表示控制电压参考;x
line
表示线路阻抗;x
l2
表示网侧滤波器电感对应阻抗。
[0055]
功率同步步骤:将经过功率滤波器的有功功率与无功功率经pi调节器生成频率与电压参考信号。
[0056]
功率同步步骤中有功功率pi调节器的时间常数小于功率计算与滤波步骤的时间常数,无功功率pi调节器的时间常数大于有功功率pi调节器时间常数。
[0057]
电压电流控制步骤:根据生成的频率与电压参考信号,控制系统中硬件模块lcl滤波器机侧电感电流与电容电压。
[0058]
电压电流控制步骤具体包括:控制系统中硬件模块lcl滤波器机侧电感电流传感器与电容电压传感器,电流内环采用p控制,参数为k
pin
,电压外环采用pi控制,其传递函数形式为:
[0059][0060]gpi
(s)表示电压外环pi控制器传递函数。
[0061]
输出电压频率与dq变换角度通过计算有功功率和无功功率获得(用于图2中abc/dq坐标变换模块,计算结果用于图2中所示的电压电流内环),相应公式为:
[0062][0063]
其中,ω表示输出电压频率;p
ref
表示有功功率参考;表示经功率滤波器滤波后的实际输出有功;ω
ref
表示输出电压频率参考;θ表示dq变换角度;表示电容电压d轴分量控制给定;表示表示电容电压q轴分量控制给定;q
ref
表示无功功率参考;表示经功率滤波器滤波后的实际输出无功;v
ref
表示控制电压参考。
[0064]
pwm调制步骤:通过对电感电流传感器与电容电压传感器的控制,生成pwm波供驱动器驱动三相igbt桥。
[0065]
接下来,对本发明进行更为具体的说明。
[0066]
如图1所示,为本发明所对应的硬件部分结构图,包括lcl滤波器、三相igbt半桥、预充电与放电回路、机侧电感电流和电容电压传感器以及控制主板和驱动器模块。预充电与放电回路前为直流电压接口,而lcl滤波器后为三相交流电压接口。机侧电感电流和电容电压经传感器采样将数据传输至控制主板中,控制主板通过本文所发明的软件部分进行计算,最终得到调制信号输出pwm信号至驱动,并最终驱动晶体管实现逆变器功能。
[0067]
如图2所示,软件部分包括电压电流内环控制、功率同步环控制、功率计算与滤波。功率测量与滤波过程可使用直接测量的三相相电流信号与电压信号i
1,abc
与u
c,abc
进行有功与无功功率计算,也可使用其坐标变换值i
1,dq
和u
c,dq
进行功率计算。滤波使用一阶惯性滤波器进行。功率同步过程为通过功率测量与滤波过程得到的有功无功功率经pi调节器生成频
率与电压参考信号。有功功率pi调节器时间常数应小于功率计算与滤波策略时间常数。内环电压电流控制过程用于控制硬件部分lcl滤波器机侧电感电流与电容电压。
[0068]
基于本文的发明,搭建了图3所示的仿真结构图。设定直流电压800v、交流电压参考380v、控制频率10khz、额定功率30kw。lcl滤波器参数取值为机侧电感值1.5mh、电容4.7μf、网侧电感3mh。仿真初始时刻功率设定为0kw,5s时逆变器功率控制给定变为10kw。本发明软件部分采用c语言编写图2所示的模块实现。
[0069]
图4和图5为本发明所对应的仿真结果图,图6和图7为采用锁相环的并网逆变器有功功率和频率动态曲线图。设定逆变器并联弱电网,并网电感为20mh。图4与图6为输出有功功率曲线图,图5与图7为频率曲线图。对比图4与图6可以看出,在并网逆变器并联弱电网时,采用本发明控制方案的逆变器功率超调较小,为30%左右,而对应采用锁相环的方案下其超调超过50%。但在频率动态方面,本发明方案的频率波动较大,但未超过
±
0.5hz的允许波动范围。对于电网更弱的情况,采用本文发明方案的控制方法有着更为显著的优势。
[0070]
本发明实施例提供了一种无锁相环的三相并网逆变器控制方法及系统,不采用锁相环生成频率与坐标变换角度,从而避免锁相环带来的不稳定问题。此外,本发明可无需测量逆变器网侧电压,从而可以在不使用电网电压传感器的情况下实现功率跟踪控制。其次,本发明采用的方案相比基于锁相环的方案,在弱网下功率调节动态更为平稳,稳定性更强。最后,本发明主要为控制方法改进,可无需对主流逆变器拓扑进行大幅度改动。
[0071]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0072]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。