技术特征:
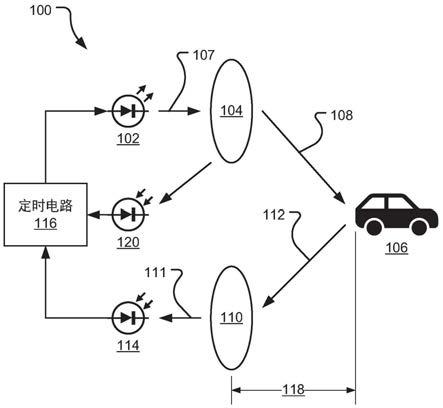
1.一种双光电二极管激光雷达系统,包括:光源,所述光源将距离测量光束定向到目标上;主光电二极管,所述主光电二极管接收来自所述目标的所述光束的反射;次光电二极管,所述次光电二极管接收说明光学器件误差的平衡信号;以及定时电路,所述定时电路基于所述主光电二极管和所述次光电二极管的组合输出来确定所述光源和所述目标之间的距离。2.如权利要求1所述的双光电二极管激光雷达系统,进一步包括:发射器光学器件组,所述发射器光学器件组将所述光束从所述光源定向到所述目标,所述光学器件误差是由来自所述发射器光学器件组的错误反射和折射中的一者或多者引起的。3.如权利要求1所述的双光电二极管激光雷达系统,进一步包括:检测器光学器件组,所述检测器光学器件组将所反射的光束从所述目标定向到所述主光电二极管,所述光学器件误差是由来自所述检测器光学器件组的错误反射和折射中的一者或多者引起的。4.如权利要求1所述的双光电二极管激光雷达系统,进一步包括:跨阻放大器,其中所述主光电二极管的输出和所述次光电二极管的输入都在连接到公共节点处的所述跨阻放大器,并且其中来自所述跨阻放大器的结果电压输出被输入到所述定时电路。5.如权利要求1所述的双光电二极管激光雷达系统,进一步包括:第一跨阻放大器,其中所述主光电二极管的输出连接到所述第一跨阻放大器的输入;以及第二跨阻放大器,其中所述次光电二极管的输出连接到所述第二跨阻放大器的输入,其中来自所述第一跨阻放大器和所述第二跨阻放大器两者的电压输出被输入到所述定时电路。6.一种操作双光电二极管激光雷达系统的方法,所述方法包括:将来自光源的距离测量光束定向到目标上;在主光电二极管上接收来自所述目标的光束的反射;在次光电二极管上接收说明光学器件误差的平衡信号;以及使用定时电路基于所述主光电二极管和所述次光电二极管的组合输出来确定所述光源和所述目标之间的距离。7.如权利要求6所述的方法,其特征在于,所述主光电二极管的输出和所述次光电二极管的输入都连接到公共节点处的跨阻放大器的电流输入,所述方法进一步包括:将所述电流输入转换为来自所述跨阻抗放大器的电压输出,其中所述电压输出被输入到所述定时电路。8.如权利要求6所述的方法,进一步包括:调整所述平衡信号的振幅和相位延迟,以与由于所述光学器件误差而被定向到所述主光电二极管上的光的振幅和相位延迟进行匹配。9.如权利要求6所述的方法,进一步包括:将所述平衡信号经由专用路径从所述光源馈送到所述次光电二极管。
10.一种双光电二极管激光雷达系统,包括:光源,所述光源将距离测量光束定向到目标上;主光电二极管,所述主光电二极管接收来自所述目标的所述光束的反射;次光电二极管,所述次光电二极管接收说明光学器件误差的平衡信号;光学器件组,所述光学器件组将来自所述光源的所述光束定向到所述目标并定向来自所述目标的所述光束的反射,所述光学器件误差是由来自所述光学器件组的错误反射和折射中的一者或多者引起的;跨阻放大器,其中所述主光电二极管的输出和所述次光电二极管的输入两者都连接到公共节点处的所述跨阻放大器的电流输入;以及定时电路,所述定时电路基于与所述公共节点处的所述跨阻放大器的所述电流输入相对应的来自所述跨阻放大器的电压输出来确定所述光源和所述目标之间的距离。
技术总结
本申请公开了双光电二极管光检测和测距。LiDAR光学路径,特别是共同定位的发射器/接收器路径配置中的LiDAR光学路径可能引入可能落在一个或多个光电传感器上的由镜、透镜和/或包壳材料或玻璃带来的意外和不需要的反射。这些不期望的信号可能导致输出放大器偏置的明显中断和/或严重通道饱和。自主车辆LiDAR尤其具有挑战性,因为包装要求需要复杂的光学器件来定向LiDAR系统的激光源;目标尺寸、形状和相对速度以及到自主车辆的距离是未知的;并且目标对象在范围内的位置可能随着时间的推移而迅速变化。目前公开的双光电二极管LiDAR系统用于分离和补偿LiDAR光学器件引入的误差,以提高LiDAR系统(包括但不限于自主车辆LiDAR系统)的精度和可靠性。统)的精度和可靠性。统)的精度和可靠性。
技术研发人员:A
受保护的技术使用者:希捷科技有限公司
技术研发日:2021.10.09
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。