1.本发明涉及与由驾驶员进行的踏板的踩踏操作对应地控制车辆的驱动力以及制动力的控制装置,特别涉及能够通过一个踏板(例如,加速器踏板)的操作来控制驱动力以及制动力这两方而操纵车辆(即,单踏板模式)的车辆的控制装置。
背景技术:
2.在专利文献1中,记载有以能够基于对车辆的主制动器系统直接附加制动力以及附加其辅助性的制动力而进行行驶过程中的缓慢减速为目的的车辆用的减速附加装置。该专利文献1所记载的减速附加装置具备能够对主制动器系统附加制动力的制动力附加机构。而且,在该减速附加装置中,作为加速器踏板冲程区域,设定有减速区域、惯性行驶区域以及加速行驶区域这三个区域,检测加速器踏板冲程处于哪个区域。在判定为加速器踏板冲程处于减速区域的情况下,使制动力附加机构工作而对主制动器系统附加制动力。制动力附加机构能够根据车速来调整制动力的附加率(减速附加率)。例如,在减速区域,在车速高的情况下,提高减速附加率而产生大的制动力。
3.另外,在专利文献2中,记载有以在所谓的单踏板模式下行驶的车辆为对象的车辆的控制装置。该专利文献2所记载的车辆的控制装置能够通过由驾驶员进行的制动器踏板的操作来制动,且能够进行通过由驾驶员进行的仅针对加速器踏板的操作来控制驱动力以及制动力这两方的单踏板模式下的行驶。在该专利文献2所记载的车辆的控制装置中,当在驾驶员在单踏板模式下操纵车辆时,驾驶员换踩在加速器踏板与制动器踏板之间操作的踏板的情况下,获取使在换踩前操作的踏板的操作量返回为0时的操作速度。然后,换踩前的踏板的操作速度越快,则用越大的校正量校正根据在换踩后操作的踏板的操作量来设定的目标加速度。由此,在从制动器踏板操作转移到加速器踏板操作的情况下,基准操作区域移动到减速区域侧,与加速器踏板操作对应的加速区域被扩大。因此,当驾驶员在加速器踏板与制动器踏板之间换踩踏板时,不会对驾驶员造成不协调感、冲击,而适当地控制车辆的加速度以及减速度。
4.此外,在专利文献3中,记载有以能够平滑地操作从减速状态向加速状态的切换为目的的车辆用减速度控制装置。该专利文献3所记载的车辆用减速度控制装置具备对车辆附加减速度的减速度附加单元(引擎制动辅助单元),在由驾驶员进行的制动器操作是非操作状态,且由驾驶员进行的加速器操作的操作量比预定值小的情况下,控制减速度附加单元,对车辆附加预定的减速度。进而,该专利文献3所记载的车辆减速度控制装置在由驾驶员进行的制动器操作从操作状态转移到非操作状态的情况下,在预定期间的期间,限制由减速度附加单元附加的减速度。
5.另外,在专利文献4中,记载有以用遵照驾驶员的意图的控制量使车辆加速以及减速为目的的加减速控制装置。该专利文献4所记载的加减速控制装置执行车辆的前后加速度控制,并且根据车辆的横向加加速度,对前后加速度控制进行控制介入,校正车辆的前后加速度。另外,根据预定条件,允许或者禁止针对该前后加速度控制的控制介入。例如,检测
由驾驶员操作的加速器踏板开度(操作量),在该加速器踏板开度小于阈值的情况下,允许向前后加速度的减速方向的校正即减速度的校正。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开平9-95222号公报
9.专利文献2:日本特开2020-67041号公报
10.专利文献3:日本特开2001-219830号公报
11.专利文献4:日本特开2010-76584号公报
技术实现要素:
12.在搭载上述专利文献1所记载的减速附加装置的车辆或者搭载上述专利文献2所记载的控制装置的车辆中,能够通过仅针对加速器踏板的操作来控制车辆的驱动力以及制动力这两方而行驶,即能够进行基于单踏板模式的行驶。在专利文献1所记载的减速附加装置中,在减速区域,如上所述根据车速来调整减速附加率,校正减速度。因此,能够得到与车速相应的适当的减速度。然而,根据车速而调整减速附加率的结果是有可能会违反驾驶员的意图地校正减速度。驾驶员在使车辆加速或者减速时,有意地进行加速器踏板、制动器踏板或者换挡装置等的驾驶操作。例如,驾驶员当在基于加速器踏板的操作的单踏板模式下操纵车辆时,有时操作制动器踏板,即,从加速器踏板换踩到制动器踏板来对车辆进行制动。当在基于制动器踏板的操作的制动时车速发生变化时,起因于该情况,如上所述的减速附加率有可能会被变更。当在这样的情形下减速附加率被变更时,会在驾驶员未意图的期间减速度被校正,之后,驾驶员再次在单踏板模式下操纵车辆时,有可能会对驾驶员造成不协调感。
13.本发明是着眼于上述技术课题而完成的,其目的在于提供即使在驾驶员在使用了加速器踏板的所谓的“单踏板模式”下操纵车辆时进行基于制动器踏板的操作的制动,之后恢复为“单踏板模式”而操纵车辆的情况下,也不对驾驶员造成不协调感,能够得到遵照驾驶员的意图的适当的减速度的车辆的控制装置。
14.为了达到上述目的,本发明提供一种车辆的控制装置,其特征在于,所述车辆具备由驾驶员操作的加速器踏板、对车辆进行制动的制动装置、由所述驾驶员操作并使所述制动装置工作的制动器踏板以及检测与由所述驾驶员进行的所述车辆的操作状态以及所述车辆的行驶状态关联的数据的检测部,在由所述驾驶员进行的所述加速器踏板的操作量处于从0至小于预定的切换操作量的减速区域的情况下,所述加速器踏板的操作量越减少,则越增大所述车辆的减速度,在所述加速器踏板的操作量处于从所述切换操作量至最大操作量为止的加速区域的情况下,所述加速器踏板的操作量越增加,则越增大所述车辆的加速度,能够通过由所述驾驶员进行的仅针对所述加速器踏板的操作来进行加速以及制动,且能够通过由所述驾驶员进行的所述制动器踏板的操作来进行制动,其中,所述车辆的控制装置具备控制器,该控制器根据由所述检测部检测到的所述数据来控制所述加速度以及所述减速度,所述控制器在所述驾驶员通过仅针对所述加速器踏板的操作来操作所述车辆时,在所述减速区域,基于根据车速而设定的减速等级(或者目标减速度)控制所述减速度,并且在进行了基于所述制动器踏板的操作的制动的情况下,根据所述制动器踏板的操作内
容(例如,操作量、操作速度、操作时间等),更新所述减速等级(或者,校正所述减速等级的值)。此外,本发明中的“加速度”定义为车辆的正方向的前后加速度,即,使车辆加速的方向的加速度,本发明中的“减速度”定义为车辆的负方向的前后加速度,即,使车辆减速的方向的加速度。另外,本发明中的“制动器踏板”例如也可以是由驾驶员手动操作的“制动器杆”、“制动器把手”等。
15.另外,本发明中的所述控制器也可以构成为在进行基于所述制动器踏板的操作的制动之后,在所述制动器踏板的操作量为预定的微小操作量以下的情况下,更新所述减速等级。
16.另外,本发明中的所述控制器也可以构成为以所述制动器踏板的操作量越小则设定越大的所述减速等级的方式,更新所述减速等级。
17.另外,本发明中的所述控制器也可以构成为在更新所述减速等级的情况下,所述制动器踏板的操作量越小,则越减小更新所述减速等级时的切换幅度(或者,所述减速等级的变更幅度)。此外,上述“切换幅度”包括“0”。即,包括在更新所述减速等级时不切换所述减速等级或者不校正所述减速等级的值的情况。
18.另外,本发明中的所述控制器也可以构成为在将所述减速等级切换为不同的值而更新的情况下,所述制动器踏板的操作量接近0的返回操作时的制动器返回速度越慢,则使切换所述减速等级时的切换速度越慢。
19.而且,本发明中的所述控制器也可以构成为在所述制动器踏板的操作量为预先决定的预定值以下的情况下,开始所述制动器返回速度的估算。
20.本发明的车辆的控制装置作为一个例子,在通过由驾驶员进行的仅针对加速器踏板的操作(在说明上设为“单踏板模式”)来操纵车辆时,在减速区域,根据针对每个车速以车速越低则使在加速器踏板的操作量为0的状态下产生的最大减速度越小的方式设定的减速等级(目标减速度)来控制车辆的减速度,在根据车速和加速器踏板的操作量确定的所需驱动力小于预定的阈值的情况下,根据在该时间点已经设定的减速等级来控制车辆的减速度,在所需驱动力为阈值以上的情况下,根据与之后所需驱动力再次小于阈值的时间点的车速对应的减速等级来控制车辆的减速度。因此,在本发明的车辆的控制装置中,针对每个车速区域设定不同的减速等级(或者,目标减速度)。例如,减速等级以车速越低则使减速度越小的方式被设定。当在“单踏板模式”下使车辆减速时,根据与驾驶员返回加速器踏板时的车速对应的减速等级,控制车辆的减速度。在“单踏板模式”下,当在加速器踏板频繁地被操作的低车速时产生的减速度大时,与踏板操作对应的减速度的变化也变大,难以进行减速操作。相对于此,在本发明的车辆的控制装置中,在低车速时,设定所产生的减速度变小的减速等级,从而能够在“单踏板模式”下进行平滑的减速。另外,在基于加速器踏板的操作量的所需驱动力小于阈值的情况即被判断为驾驶员没有加速意图或者加速意图弱的情况下,根据在该时间点已经设定的减速等级来控制减速度。即,维持驾驶员返回前次加速器踏板时的减速等级,根据该已设的减速等级来控制减速度。在该情况下,只要驾驶员不意图进行加速器踏板的操作、制动器操作等,就维持相同的减速等级,继续进行车辆的减速。因此,能够避免违反驾驶员的意图而变更减速等级或者校正减速度的情形。另一方面,在基于加速器踏板的操作量的所需驱动力为阈值以上的情况即被判断为驾驶员有加速意图或者加速意图强的情况下,例如,根据与之后所需驱动力再次小于阈值的时间点的车速对应的减
速等级来控制减速度。即,在该情况下,能够推测为驾驶员在踩踏加速器踏板之后,在返回该加速器踏板的踩踏时感受到车辆的加速,所以切换为与返回加速器踏板的踩踏的时间点的车速对应的减速等级。总之,在本发明的车辆的控制装置中,当在“单踏板模式”下使车辆减速时,在被判断为驾驶员没有加速意图的情况下,成为重视平滑的减速控制性的控制,在被判断为驾驶员有加速意图的情况下,成为重视减速感觉的控制。因而,根据本发明的车辆的控制装置,能够当在“单踏板模式”下控制车辆的制动力时得到遵照驾驶员的意图的适当的减速度。
21.进而,在本发明的车辆的控制装置中,在驾驶员在“单踏板模式”下操纵车辆时,进行了基于驾驶员的制动器踏板的操作的制动(例如,制动器开关成为接通)的情况下,根据该制动器踏板的操作内容,更新上述减速等级。或者,校正上述减速等级的值。当在“单踏板模式”的中途操作制动器踏板,对车辆进行制动时,由于该制动而车速下降,其结果,有时实际的车速区域与和在该时间点设定的减速等级对应的车速区域背离。在这样的情况下,当假设由于车速发生变化而减速等级被更新时,与由驾驶员进行的制动器踏板的操作不对应地车辆的减速度发生变化,有可能会对尚处于对制动器踏板进行操作的过程中的驾驶员造成不协调感。另外,在驾驶员未意图的期间减速等级会被更新,之后驾驶员再次在“单踏板模式”下操纵车辆时,有可能会对驾驶员造成不协调感。因而,在本发明的车辆的控制装置中,如上所述,当在“单踏板模式”的中途进行了基于制动器踏板的操作的制动的情况下,根据此时的制动器踏板的操作内容,更新减速等级。例如,根据制动器踏板的操作量(踩踏量)来判断由驾驶员进行的制动器踏板的操作状况,在该制动器踏板的操作结束之后,更新减速等级。或者,根据制动器踏板的操作量的大小,变更减速等级的切换幅度(减速等级的值的校正量),更新减速等级。或者,根据制动器踏板的操作速度,变更减速等级的切换速度,更新减速等级。因此,即使是“单踏板模式”,也成为考虑了制动器踏板的操作内容的减速度的控制。因而,根据本发明的车辆的控制装置,即使在驾驶员在使用了加速器踏板的“单踏板模式”下操纵车辆时进行了基于制动器踏板的操作的制动,之后恢复为“单踏板模式”而操纵车辆的情况下,也不对驾驶员造成不协调感,能够得到遵照驾驶员的意图的适当的减速度。
22.另外,在本发明的车辆的控制装置中,如上所述,当在驾驶员在“单踏板模式”下操纵车辆时,进行了基于驾驶员的制动器踏板的操作的制动的情况下,在该制动器踏板的操作量为预定的微小操作量以下(例如,制动器开关成为关断)的情况下,更新上述减速等级。因此,在驾驶员操作制动器踏板的期间,维持与通常同样的操作感,在由驾驶员进行的制动器踏板的操作结束之后,更新减速等级。因而,根据本发明的车辆的控制装置,能够避免在驾驶员操作制动器踏板的期间对驾驶员造成由于违反驾驶员的意图地减速度发生变化而引起的不协调感的情形。
23.另外,在本发明的车辆的控制装置中,如上所述,在驾驶员在“单踏板模式”下操纵车辆时,进行了基于驾驶员的制动器踏板的操作的制动的情况下,以该制动器踏板的操作量越小则设定越大(越高)的减速等级的方式,更新减速等级。换言之,在减速等级被切换(减速等级的值被变更)而更新时,制动器踏板的操作量越小,则更新减速等级时的切换幅度或者减速等级的变更幅度越小。上述切换幅度(或者,变更幅度)包括“0”。即,包括不切换减速等级或者维持减速等级的值的情况。因此,在制动器踏板的操作量小的情况下,减速等
级的切换幅度(变更幅度)被限制。因而,根据本发明的车辆的控制装置,能够抑制当在“单踏板模式”下进行了基于驾驶员的制动器踏板的操作的制动的情况下减速度发生超出驾驶员意图的变化、制动器踏板的操作量与和其对应的减速度的变化量背离的情形。
24.另外,在本发明的车辆的控制装置中,如上所述,在驾驶员在“单踏板模式”下操纵车辆时进行了基于驾驶员的制动器踏板的操作的制动的情况成为契机,将减速等级切换为不同的值而更新的情况下,制动器踏板的返回操作速度越慢,则切换上述减速等级时的切换速度越慢。即,反映由驾驶员进行的制动器踏板的返回操作的状态来切换减速等级。因此,能够使由驾驶员进行的制动器踏板的操作与车辆的减速度的变化成比例地对应。因而,根据本发明的车辆的控制装置,当在“单踏板模式”下进行了基于驾驶员的制动器踏板的操作的制动的情况下,能够进行平滑的制动操作,能够抑制驾驶员受到的不协调感。
25.而且,在本发明的车辆的控制装置中,如上所述,在根据制动器踏板的返回操作速度来切换减速等级时,在制动器踏板的操作量为预定值以下的情况下,开始制动器踏板的返回操作速度的估算。关于该情况下的预定值,为了反映最近的驾驶员的减速意图(减速梯度),在驾驶员能够感觉到减速度的变化的制动器踏板的操作量的范围内,将操作量最小的值预先设定为阈值。从低于该阈值的时间点即制动器踏板的操作量为预定值以下的时间点起,开始制动器踏板的返回操作速度的估算。由此,能够在驾驶员返回制动器踏板的过程中,使用从驾驶员能够感觉到通过制动器踏板的操作而产生的减速度的期间的结束时至成为制动器关断(例如,操作量为“0”)为止的期间,计算制动器踏板的返回操作速度。因而,在成为制动器关断时,当进行与制动器踏板的操作量相应的减速度等级的更新时,与和根据上述期间而计算出的制动器踏板的返回操作速度相应的变化量相匹配地,进行减速度等级的变更。因此,能够抑制在从并用制动器踏板的操作的减速恢复到仅用加速器踏板控制加速及减速的行驶(即,“单踏板模式”)时以与驾驶员的意图相背的速度进行减速度的更新的情形。
附图说明
26.图1是示出在本发明的车辆的控制装置中作为控制的对象的车辆的结构以及控制系统的一个例子的图。
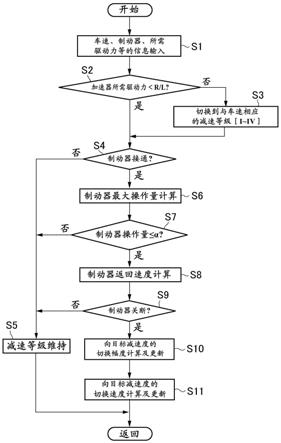
27.图2是用于说明由本发明的车辆的控制装置执行的控制内容的一个例子的流程图。
28.图3是用于说明由本发明的车辆的控制装置执行的控制中的“减速等级”与车速的关系的图。
29.图4是用于说明由本发明的车辆的控制装置执行的控制中的“减速等级”与加速器踏板的操作量(加速器操作量)的关系的图,另外,是示出“单踏板模式”下的“减速区域”、“加速区域”以及“切换操作量”等的图。
30.图5是用于说明由本发明的车辆的控制装置执行的控制中的“微小踩踏”、“中间踩踏”以及“深度踩踏”等制动器踏板的操作状态的图,另外是用于说明与各操作状态对应的减速等级的“切换幅度”的图。
31.图6是用于说明按照与图5所示的各操作状态对应的“切换幅度”更新减速等级的控制内容的一个例子的图。
32.图7是用于说明由本发明的车辆的控制装置执行的控制中的“制动器返回速度”以及与该“制动器返回速度”成比例的减速等级的“切换速度”的时序图。
33.图8是用于说明图7所示的“切换速度”的获取方法的其它实施方式的图,是示出根据“制动器返回速度”从三个水准的变化速度求出“切换速度”的例子的时序图。
34.图9是用于说明由本发明的车辆的控制装置执行的控制的具体的实施方式的时序图。
35.符号说明
36.1:驱动力源(pwr);2:驱动轮;3:加速器踏板;4:制动装置(bk);5:制动器踏板;6:检测部:;6a:(检测部的)车轮速传感器;6b:(检测部的)加速器位置传感器;6c:(检测部的)制动器冲程传感器(或者,制动器开关);6d:(检测部的)加速度传感器;7:控制器(ecu);8:变速器;9:差动齿轮;10:驱动轴;ve:车辆。
具体实施方式
37.参照图,说明本发明的实施方式。此外,以下所示的实施方式只不过是使本发明具体化的情况的一个例子,并不限定本发明。
38.图1示出了在本发明的实施方式中作为控制对象的车辆ve的驱动系统以及控制系统的一个例子。图1所示的车辆ve作为代表而具备驱动力源(pwr)1、驱动轮2、加速器踏板3、制动装置(bk)4、制动器踏板5、检测部6以及控制器(ecu)7。
39.驱动力源1例如是汽油引擎、柴油引擎等内燃机,构成为电控制输出的调整及起动以及停止等的工作状态。如果驱动力源1是汽油引擎,则电控制节流阀的开度、燃料的供给量或者喷射量、点火的执行以及停止及点火时期等。另外,如果驱动力源1是柴油引擎,则电控制燃料的喷射量、燃料的喷射时期或者例如egr系统中的节流阀的开度等。或者,本发明的实施方式中的驱动力源1例如也可以是永久磁铁式的同步马达或感应马达等电动马达。该情况下的电动马达例如也可以是所谓的电动发电机,该电动发电机兼具作为通过供给电力而被驱动从而输出马达转矩的原动机的功能和作为通过接受来自外部的转矩而被驱动从而产生电力的发电机的功能。如果是电动发电机,则电控制转速、转矩或者作为原动机的功能与作为发电机的功能的切换等。
40.驱动轮2通过传递驱动力源1输出的驱动转矩,从而产生车辆ve的驱动力。在图1所示的实施方式中,驱动轮2经由变速器8、差动齿轮9以及驱动轴10连结于驱动力源1。此外,本发明的实施方式中的车辆ve也可以是如图1所示的实施方式那样将驱动转矩传递给前轮,在前轮产生驱动力的前轮驱动车。或者,车辆ve例如也可以是经由传动轴(未图示)等将驱动转矩传递给后轮,在后轮产生驱动力的后轮驱动车。或者,车辆ve也可以是设置传动机构(未图示),将驱动转矩传递给前轮以及后轮这两方,在前轮以及后轮这两方产生驱动力的四轮驱动车。
41.在本发明的实施方式中作为控制对象的车辆ve是以往普通的结构,具备用于驾驶员调整驱动力而进行车辆ve的加速操作的加速器踏板3。通过踩踏加速器踏板3,从而与该加速器踏板3的操作量(踩踏量或加速器开度或者加速器位置)对应地,节气门位置(例如,汽油引擎的节流阀的开度或者柴油引擎的燃料喷射量)增大。其结果,驱动转矩增大,车辆ve的驱动力增大。相反,通过返回加速器踏板3的踩踏(操作量降低,或加速器开度或者加速
器位置下降),从而与该加速器踏板3的操作量对应地,节气门位置下降。其结果,驱动转矩减少,车辆ve的驱动力减少。另外,与驱动力减少相伴地,车辆ve的制动力增大。即,通过返回加速器踏板3的踩踏,从而所谓的引擎制动器进行作用,车辆ve的制动力增大。例如,内燃机的摩擦转矩、泵气损失成为对抗驱动转矩的阻力(制动转矩),在车辆ve中产生制动力。或者,在作为驱动力源1而搭载有电动马达的情况下,电动马达作为再生制动器发挥功能,在车辆ve中产生再生制动力。
42.如上所述,加速器踏板3通过驾驶员的操作来调整车辆ve的驱动力以及制动力。如后所述,该加速器踏板3设置有加速器位置传感器6b,该加速器位置传感器6b用于检测由驾驶员进行的加速器踏板3的踩踏操作中的操作量、操作速度。能够利用加速器位置传感器6b来检测加速器踏板3的操作量(即,加速器开度或者加速器位置)。另外,通过利用加速器位置传感器6b来检测加速器踏板3的操作速度,能够判断由驾驶员进行的加速器踏板3的操作状态以及操作方向。即,能够判断是由驾驶员踩踏加速器踏板3的状态,还是由驾驶员返回加速器踏板3的踩踏的状态。
43.制动装置4是产生车辆ve的制动力的装置,例如使用油压式的盘形制动器、圆筒式制动器等以往普通的结构。在本发明的实施方式中的车辆ve中,制动装置4由控制器7控制而工作。另外,在如后所述的“单踏板模式”下,以根据由驾驶员进行的加速器踏板3的操作状态以及操作量来产生制动力的方式进行工作。此外,车辆ve具备用于驾驶员操作制动装置4,调整由制动装置4产生的制动力而进行车辆ve的制动操作的制动器踏板5。因而,制动装置4通过由驾驶员进行的制动器踏板5的踩踏操作来工作,产生车辆ve的制动力。因而,车辆ve能够设定如后所述的“通常模式”以及“单踏板模式”这两个驾驶模式。另外,如后所述,制动器踏板5设置有制动器冲程传感器6c,该制动器冲程传感器6c用于检测由驾驶员进行的制动器踏板5的踩踏操作中的操作量、操作速度。通过利用该制动器冲程传感器6c来检测制动器踏板5的操作速度,能够判断由驾驶员进行的制动器踏板5的操作状态以及操作方向。即,能够判断是由驾驶员踩踏制动器踏板5的状态还是由驾驶员返回制动器踏板5的踩踏的状态。
44.此外,还能够代替上述制动器冲程传感器6c而使用检测由驾驶员进行的制动器踏板5的操作状态(制动装置4的接通及关断或者制动器踏板5的操作量)的制动器开关(未图示)。另外,在本发明的实施方式中的车辆ve的控制装置中,也可以代替如上所述的制动器踏板5而例如使用由驾驶员手动操作的“制动器杆”(未图示)或者“制动器把手”(未图示),与制动器踏板5同样地发挥功能。
45.检测部6是用于获取在控制车辆ve时所需的各种数据、信息的设备或者装置,例如包括电源部、微型计算机、传感器以及输入输出接口等。特别是,本发明的实施方式中的检测部6具有分别检测车轮的转速的车轮速传感器6a以及检测加速器踏板3的操作量(即,加速器位置或者加速器开度)以及操作速度的加速器位置传感器6b。除此之外,例如,还具有检测制动器踏板5的操作量、踩踏力的制动器冲程传感器(或者,制动器开关)6c以及检测车辆ve的前后加速度的加速度传感器6d等。然后,检测部6与后述控制器7电连接,将与如上所述的各种传感器、设备、装置等的检测值或者计算值相应的电信号作为检测数据而输出到控制器7。
46.控制器7例如是将微型计算机作为主体而构成的电子控制装置,特别是,本发明的
实施方式中的控制器7主要分别控制驱动力源1、制动装置4以及变速器8等的动作。由上述检测部6检测到或者计算出的各种数据被输入到控制器7。控制器7使用所输入的各种数据以及预先存储的数据、计算式等来进行运算。与此一起,控制器7构成为将其运算结果作为控制指令信号而输出,分别控制如上所述的驱动力源1、制动装置4或者变速器8等的动作。
47.例如,控制器7基于根据由加速器位置传感器6b检测到的加速器踏板3的操作量以及车轮速传感器6a的检测值而计算出的车速,计算驱动力源1的目标驱动转矩。然后,根据该目标驱动转矩,控制驱动力源1的输出。另外,控制器7控制在变速器8中设定的变速比(或,变速档)。另外,控制器7与由加速器位置传感器6b检测到的加速器踏板3的操作量以及操作速度对应地,控制在车辆ve中产生的驱动力以及制动力。或者,与制动器踏板5的操作量、踩踏力对应地,控制在车辆ve中产生的制动力。此外,在图1中,示出了设置有一个控制器7的例子,但控制器7例如也可以针对每个控制的装置、设备,或者针对每个控制内容而设置多个。
48.本发明的实施方式中的车辆ve能够作为由驾驶员进行的车辆ve的驱动力以及制动力的控制的方式而在根据由驾驶员进行的加速器踏板3的操作量来控制驱动力以及制动力这两方的所谓的“单踏板模式”下行驶。另外,本发明的实施方式中的车辆ve具备与以往普通的车辆同样的制动器踏板5,能够在根据加速器踏板3以及制动器踏板5各自的操作量来控制驱动力以及制动力的“通常模式”下行驶。因而,能够设定“通常模式”以及“单踏板模式”这两个驾驶模式。然后,能够选择性地适当地切换这些“通常模式”和“单踏板模式”而行驶。
49.在“通常模式”下,与以往普通的车辆同样地,通过由驾驶员进行的加速器踏板3以及制动器踏板5的操作,进行车辆ve的加速以及减速。此外,在本发明的实施方式中作为控制的对象的车辆ve未必构成为能够设定“通常模式”、“单踏板模式”等多个驾驶模式。例如,也可以是基本上通过仅针对加速器踏板3的操作使车辆ve行驶的结构,辅助性地或者作为紧急用而设置有如上所述的制动器踏板5的结构。
50.在“单踏板模式”下,通过由驾驶员进行的仅针对加速器踏板3的操作,进行车辆ve的加速以及减速。具体而言,在本发明的实施方式中的车辆ve中,例如针对加速器踏板3的操作量的范围,设定有与相对大的操作量对应的加速区域和与相对小的操作量对应的减速区域。在本发明的实施方式中的车辆ve的控制装置中,设定有划分针对加速器踏板3的操作量的减速区域和加速区域的切换操作量。如后述图4所示,加速器踏板3的操作量为0至切换操作量的区域是减速区域。在加速器踏板3的操作量处于减速区域的状态下,操作量越减少,则车辆ve的制动力越增大。加速器踏板3的操作量为切换操作量至最大操作量的区域是加速区域。在加速器踏板3的操作量处于加速区域的状态下,操作量越增加,则车辆ve的驱动力越增大。加速器踏板3的最大操作量例如在用加速器开度表示加速器踏板3的操作量的情况下,成为加速器全开的状态即加速器开度是100%的状态。
51.因而,在“单踏板模式”下的加速区域,加速器踏板3作为通常的状态(即,“通常模式”的状态)的加速器踏板而发挥功能。即,在加速区域,以与加速器踏板3的操作量的增加对应地使车辆ve的驱动力增大的方式控制。换言之,以加速器踏板3的操作量越大则使车辆ve的加速度越增大的方式控制。
52.另一方面,在“单踏板模式”下的减速区域,以与加速器踏板3的操作量的减少对应
地使车辆ve的制动力增大的方式控制。换言之,以加速器踏板3的操作量越小则使车辆ve的减速度越增大的方式控制。该情况下的制动力包括如前所述的引擎制动器力以及通过使制动装置4工作而产生的制动力这两方。另外,在作为驱动力源1而具备电动发电机的情况下,还包括基于由电动发电机产生的再生转矩的制动力。以满足所需的制动力的方式,分别协调地控制如上所述的各种制动力。此外,在本发明的实施方式的说明中,“减速度”定义为车辆ve的负方向的前后加速度,即,使车辆ve减速的方向的加速度。
53.本发明的实施方式中的车辆的控制装置能够以能够在如上所述的“单踏板模式”下行驶的车辆ve为对象,在驾驶员在“单踏板模式”下操纵车辆ve时,得到遵照驾驶员的意图的适当的减速度。进而,本发明的实施方式中的车辆的控制装置的目的如前所述是即使在驾驶员在使用了加速器踏板3的“单踏板模式”下操纵车辆ve时进行基于制动器踏板5的操作的制动的情况下,也不对驾驶员造成不协调感,适当地控制减速度。图2的流程图示出了为了实现这样的目的而由控制器7执行的控制的一个例子。
54.图2的流程图所示的控制在车辆ve的驾驶模式处于“单踏板模式”的情况下被执行。在车辆ve是能够设定“通常模式”以及“单踏板模式”这两个驾驶模式的结构的情况下,在被判断为车辆ve的驾驶模式处于“单踏板模式”的情况下被执行。
55.首先,在步骤s1中,检测与由驾驶员进行的车辆ve的操作状态以及车辆ve的行驶状态关联的数据,这些检测到的各种数据被输入到控制器7。例如,车速、加速器踏板3的操作量(或者,加速器开度、加速器位置)、制动器踏板5的操作量及所需驱动力等各种数据被输入到控制器7。所需驱动力例如根据加速器踏板3的操作量以及车速来计算。
56.在步骤s2中,判断加速器所需驱动力是否小于阈值r/l。加速器所需驱动力是基于驾驶员的加速器踏板3的操作内容的所需驱动力,如上所述,在步骤s1中,根据由驾驶员进行的加速器踏板3的操作量以及车速而求出。阈值r/l是为了判断驾驶员的加速意图而决定的判断基准值。例如,阈值r/l被设定为与和行驶阻力(所谓的road load,路面载荷)相匹配的车辆ve的驱动力同等的值。在加速器所需驱动力为阈值r/l以上的情况下,被判断为驾驶员有加速意图,或者驾驶员的加速意图强。在加速器所需驱动力小于阈值r/l的情况下,被判断为驾驶员没有加速意图,或者,驾驶员的加速意图弱。
57.在加速器所需驱动力为阈值r/l以上,从而在该步骤s2中被判断为否定的情况、即被判断为驾驶员有加速意图或者驾驶员的加速意图强的情况下,进入到步骤s3。
58.在步骤s3中,设定减速等级,并且切换为与车速相应的减速等级。在此,减速等级是在“单踏板模式”的减速区域控制减速度时的目标减速度(控制的目标值),以车速越低则使在加速器踏板3的操作量为0的状态下产生的最大减速度越小的方式设定。例如,如图3所示,减速等级针对每个预定的车速而设定。在图3所示的例子中,
59.(1)车速区域:25km/h以下
→
减速等级iv
60.(2)车速区域:25~35km/h
→
减速等级iii
61.(3)车速区域:35~50km/h
→
减速等级ii
62.(4)车速区域:50km/h以上
→
减速等级i
63.如上那样,针对四个车速区域的每个车速区域设定四个级别的减速等级。此外,这是针对多个车速区域的每个车速区域设定的减速等级的一个例子,也可以针对划分为两个或者三个的车速区域的每个车速区域设定两个级别或者三个级别的减速等级。或者,也可
以针对划分为五个以上的车速区域的每个车速区域设定五个级别以上的减速等级。
64.另外,如上述图3以及图4所示,减速等级i是产生最大的减速度的目标减速度,接着是按照减速等级ii、减速等级iii的顺序产生大的减速度的目标减速度。因而,减速等级iv是产生最小的减速度的目标减速度。此外,如图3所示,关于在50km/h以上的高车速区域设定的减速等级i,考虑基于作为驱动力源1而搭载有电动发电机的情况下的电动发电机的再生动力界限,以车速越高则使目标减速度越小(即,在图3中表示减速等级i的线成为右上升的斜线)的方式设定。
65.在车辆ve的启动时,该图2的流程图所示的控制的开始当初是车辆ve是停止的(车速为0的)状态,所以作为初始值而设定减速等级iv。在下次以后的例程中,维持在前次例程中最终设定的减速等级,设定为本次例程的初始值。
66.另外,当在加速器所需驱动力增大的过程中成为阈值r/l以上的情况下,减速等级切换为与之后加速器所需驱动力再次小于阈值r/l的时间点的车速对应的减速等级而设定。然后,将该切换后的减速等级作为目标减速度而控制减速度。
67.这样,在本发明的实施方式中的车辆ve的控制装置中,针对每个车速区域设定不同的减速等级(目标减速度)。减速等级以车速越低则使减速度越小的方式设定。当在“单踏板模式”下使车辆ve减速时,根据与驾驶员返回了加速器踏板3时的车速对应的减速等级,控制车辆ve的减速度。在本发明的实施方式中的车辆ve的控制装置中,在低车速时,设定所产生的减速度变小的减速等级(例如,在图3、图4所示的例子中是减速等级iii、减速等级iv),从而能够在“单踏板模式”下进行平滑的减速。
68.另外,在基于加速器踏板3的操作量的所需驱动力为阈值r/l以上的情况即被判断为驾驶员有加速意图或者加速意图强的情况下,根据与之后所需驱动力再次小于阈值r/l的时间点的车速对应的减速等级来控制减速度。即,在该情况下,能够推测为驾驶员在踩踏加速器踏板3之后,在返回该加速器踏板3的踩踏时感觉到车辆ve的加速,所以切换为与返回了加速器踏板3的踩踏的时间点的车速对应的减速等级。总之,在本发明的实施方式中的车辆ve的控制装置中,当在“单踏板模式”下使车辆ve减速时,在被判断为驾驶员没有加速意图的情况下,成为重视平滑的减速控制性的控制,在被判断为驾驶员有加速意图的情况下,成为重视减速感觉的控制。因而,根据本发明的实施方式中的车辆的控制装置,能够当在“单踏板模式”下控制车辆ve的制动力时,得到遵照驾驶员的意图的适当的减速度。
69.另一方面,在驾驶员在使用了加速器踏板3的“单踏板模式”下操纵车辆ve时,进行了基于制动器踏板5的操作的制动的情况下,起因于在基于该制动器踏板5的操作的制动时车速发生变化,如上所述的减速等级有可能会被切换。当在这样的情形下切换减速等级时,在驾驶员未意图的期间,减速度发生变化,有可能会对驾驶员造成不协调感。因而,在本发明的实施方式中的车辆ve的控制装置中,在进行了基于驾驶员的制动器踏板5的操作的制动的情况下,根据该制动器踏板5的操作内容(例如,操作量、操作速度、操作时间等),更新减速等级。
70.具体而言,在图2的流程图中,如上所述,当在步骤s3中设定减速等级时,进入到步骤s4。另外,加速器所需驱动力小于阈值r/l,从而当在前述步骤s2中被判断为肯定的情况即被判断为驾驶员没有加速意图或者驾驶员的加速意图弱的情况下,进入到步骤s4。
71.在步骤s4中,判断是否是制动器接通。即,判断是否进行了基于驾驶员的制动器踏
板5的操作的制动。具体而言,判断由制动器冲程传感器6c检测的制动器踏板5的操作量(踩踏量)是否为微小操作量(或者,下限操作量)以上。微小操作量是为了判断由驾驶员进行的制动器踏板5的操作状态而决定的判断基准值。例如,微小操作量被设定为制动器开关(未图示)成为接通的最少的制动器踏板5的操作量的值。在该步骤s4中,在制动器踏板5的操作量小于微小操作量的情况下,被判断为尚未进行基于驾驶员的制动器踏板5的操作的制动。因而,在制动器踏板5的操作量从小于微小操作量的状态成为微小操作量以上的情况下,被判断为进行了基于驾驶员的制动器踏板5的操作的制动,即成为了制动器接通。
72.制动器踏板5的操作量小于微小操作量,尚不是制动器接通的状态,从而当在该步骤s4中被判断为否定的情况下,进入到步骤s5。
73.在步骤s5中,维持减速等级。即,接着设定在该时间点已经设定的减速等级(基础的减速等级),将该维持的减速等级作为目标减速度而控制减速度。之后,暂且结束该图2的流程图所示的例程。
74.这样,在上述步骤s5中,在基于加速器踏板3的操作量的所需驱动力小于阈值r/l的情况且未进行基于驾驶员的制动器踏板5的操作的制动的情况下,根据作为基础的减速等级来控制减速度。即,维持驾驶员以前返回加速器踏板3时的减速等级的设定,根据该已设的减速等级来控制减速度。在该情况下,只要驾驶员不意图进行加速器踏板3的操作、制动器操作等,就维持相同的减速等级,继续车辆ve的减速。因此,能够避免违反驾驶员的意图地变更减速等级的情形,或者违反驾驶员的意图地校正减速度的情形。
75.另一方面,在制动器踏板5的操作量为微小操作量以上,成为制动器接通的状态,从而在前述步骤s4中被判断为肯定的情况下,进入到步骤s6。
76.在步骤s6中,求出制动器最大操作量。制动器最大操作量是从开始制动器踏板5的操作起至结束为止(即,从暂且成为制动器接通起至成为制动器关断为止)的期间的制动器踏板5的操作量的最大值。例如,根据由制动器冲程传感器6c检测的制动器踏板5的操作量以及操作速度等,计算制动器最大操作量即制动器踏板5的操作量的最大值。
77.接着,在步骤s7中,判断制动器踏板5的操作量是否为预定值α以下。预定值α是用于判断计算后述制动器返回速度时的起点(经过时间的测定开始时间点)的阈值。预定值α在驾驶员能够感觉到减速度的变化的制动器踏板5的操作量的范围内被设定为最小的制动器踏板5的操作量。为了将最近的驾驶员的减速意图(减速梯度)反映到控制,例如,根据利用实车进行的行驶实验、仿真等的结果而预先设定预定值α。因而,在该步骤s7中,在制动器踏板5的操作量为预定值α以下的情况下,被判断为是开始制动器踏板5的返回操作速度的估算的定时。在制动器踏板5的操作量比预定值α大的情况下,被判断为尚不是开始制动器返回速度的估算的定时。
78.在制动器踏板5的操作量比预定值α大,即尚不是开始制动器返回速度的估算的定时,从而在该步骤s7中被判断为否定的情况下,进入到步骤s5。
79.在步骤s5中,与以前同样地,维持减速等级。即,在该情况下,不进行如减速等级的值(减速度)变小那样的减速等级的更新,维持已经设定的减速等级(即,减速度最大的基础的减速等级)的设定。然后,将该维持的减速等级作为目标减速度而控制减速度。之后,暂且结束该图2的流程图所示的例程。
80.相对于此,在制动器踏板5的操作量为预定值α以下,即到达开始制动器返回速度
的估算的定时,从而在步骤s7中被判断为肯定的情况下,进入到步骤s8。
81.在步骤s8中,求出制动器返回速度。制动器返回速度是在由驾驶员进行的制动器踏板5的踩踏操作中制动器踏板5的操作量接近0的返回操作时的操作速度。例如,根据由制动器冲程传感器6c检测的制动器踏板5的操作量以及操作速度等,计算制动器返回速度。如后述图7所示,制动器返回速度例如作为与由驾驶员控制的制动转矩的变化梯度(变化速度)相当的值而计算出。
82.接着,在步骤s9中,判断是否是制动器关断。即,判断基于驾驶员的制动器踏板5的操作的制动是否结束。具体而言,判断由制动器冲程传感器6c检测的制动器踏板5的操作量是否小于微小操作量。微小操作量是为了判断由驾驶员进行的制动器踏板5的操作状态而决定的判断基准值,是与用于在前述步骤s4中判断是否是制动器接通的微小操作量相同的判断基准值。或者,也可以是针对在步骤s4中使用的微小操作量设置有与预定的磁滞误差相当的差分的判断基准值。在该步骤s9中,在制动器踏板5的操作量为微小操作量以上的情况下,判断为尚未进行基于驾驶员的制动器踏板5的操作的制动,即是制动器接通的状态。因而,在制动器踏板5的操作量从微小操作量以上的状态成为小于微小操作量的情况下,被判断为基于驾驶员的制动器踏板5的操作的制动结束,即成为制动器关断。
83.在制动器踏板5的操作量为微小操作量以上,尚不是制动器关断的状态,从而在该步骤s9中被判断为否定的情况下,进入到步骤s5。
84.在步骤s5中,与以前同样地维持减速等级。即,在该情况下,基于驾驶员的制动器踏板5的操作的制动尚未结束,所以不进行减速等级的更新,而维持已经设定的减速等级的设定。然后,将该维持的减速等级作为目标减速度而控制减速度。之后,暂且结束该图2的流程图所示的例程。
85.相对于此,在制动器踏板5的操作量小于微小操作量,成为制动器关断,从而在步骤s9中被判断为肯定的情况下,进入到步骤s10。
86.在步骤s10中,计算减速等级向目标减速度的切换幅度。切换幅度是为了设定目标减速度而更新减速等级时的减速等级的变化量或者减速等级的值(减速度)的校正量。该情况下的切换幅度也可以包括“0”。即,也可以包括“不切换减速等级”或者“不校正减速等级的值”的更新的状态。另外,在该步骤s10中,如上所述计算减速等级的切换幅度,并且根据该计算出的切换幅度,更新减速等级。然后,根据在该步骤s10中更新后的减速等级,控制减速度。
87.在本发明的实施方式中,作为由驾驶员进行的制动器踏板5的操作状态,例如设置有“微小踩踏”、“中间踩踏”以及“深度踩踏”这三个级别的划分。这三个级别的划分是根据制动器踏板5的操作量来判别的。例如,将制动器踏板5的操作量成为从“0”至预定的第1操作量为止的范围内的操作状态判别为“微小踩踏”。第1操作量是接近“0”的、相对小的预定值。另外,将制动器踏板5的操作量成为从第1操作量至预定的第2操作量为止的范围内的操作状态判别为“中间踩踏”。第2操作量是常用的操作量区域内的值,是比上述第1操作量大的、相对大的预定值。然后,将制动器踏板5的操作量为第2操作量以上的操作状态判别为“深度踩踏”。这些第1操作量以及第2操作量是例如根据利用实车进行的行驶实验、仿真等的结果而分别预先设定的。
88.然后,在本发明的实施方式中,针对如上所述划分的各操作状态(制动器踏板5的
踩踏状态)设定有切换减速等级而更新时的切换幅度。例如,以制动器踏板5的操作量越大则使减速等级的切换幅度越大的方式,针对各操作状态的划分分别设定预定的切换幅度。即,以按照“微小踩踏”、“中间踩踏”、“深度踩踏”的顺序使减速等级的切换幅度变大的方式,设定与各操作状态的划分对应的切换幅度。
89.例如,如图5所示,针对“微小踩踏”,减速等级的切换幅度被设定为“0”。因而,在由驾驶员进行的制动器踏板5的操作状态是“微小踩踏”的情况下,减速等级不被切换而被更新。即,维持减速等级的值(减速度)而更新。具体而言,如图6所示,在当前状况的减速等级是减速等级ii的情况下,在减速等级的更新后,仍维持减速等级ii的设定。另外,针对“中间踩踏”,减速等级的切换幅度被设定为“ 1”。因而,在由驾驶员进行的制动器踏板5的操作状态是“中间踩踏”的情况下,减速等级切换为高一个级别的减速等级而更新。具体而言,如图6所示,在当前状况的减速等级是减速等级ii的情况下,切换为高一个级别的减速等级iii。然后,针对“深度踩踏”,减速等级的切换幅度被设定为“ 2”。因而,在由驾驶员进行的制动器踏板5的操作状态是“深度踩踏”的情况下,减速等级切换为高两个级别的减速等级而更新。具体而言,如图6所示,在当前状况的减速等级是减速等级ii的情况下,切换为高两个级别的减速等级iv。
90.接着,在步骤s11中,计算向目标减速度的减速等级的切换速度。切换速度是为了设定目标减速度而将减速等级切换为不同的值而更新时的减速等级的变化速度或者减速等级的值(减速度)的变化速度。
91.在本发明的实施方式中,在将减速等级切换为不同的值而更新的情况下,制动器踏板5的操作量接近0的返回操作时的制动器返回速度越慢,则使减速等级的切换速度越慢。即,减速等级的切换速度与制动器返回速度处于比例关系。
92.如图7的时序图所示,制动器返回速度例如作为与时刻t1至时刻t2的期间中的制动转矩的变化梯度(变化速度)相当的值而计算出。在该图7的时序图所示的实施方式中,时刻t1是减速度变化的测定开始点,是制动转矩超过预定值a而接近“0”的时刻。该情况下的减速度变化的测定开始点(时刻t1)是通过图2的流程图中的步骤s7的控制而制动器踏板5的操作量成为预定值α以下的时间点。因而,在该图7的时序图所示的实施方式中,由驾驶员控制的制动转矩向接近“0”的方向减少,在超过预定值a之后,开始制动器踏板5的返回操作速度的估算。具体而言,开始后述期间t的测量。时刻t2是制动转矩成为“0”的时刻,即基于驾驶员的制动器踏板5的操作的制动结束(成为制动器关断)的时刻。然后,在该图7的时序图所示的实施方式中,以制动转矩超过预定值a的时刻t1为起点,测量直至成为制动器关断的时刻t2为止的期间t。因而,制动器返回速度成为与“a/t”相当的值。
93.另外,计算从时刻t1至时刻t2为止的期间t中的减速度的变化梯度(变化速度)。因而,该情况下的减速度的变化梯度(变化速度)是与上述制动器返回速度相当的值,与制动器返回速度成比例。另外,以与该期间t中的减速度的变化梯度(变化速度)成比例的方式,计算减速等级的切换速度(变化速度)。因而,该情况下的减速等级的切换速度(变化速度)也与上述制动器返回速度成比例。然后,根据计算出的减速等级的切换速度(变化速度),切换减速等级。即,更新减速等级。在该图7的时序图所示的实施方式中,以成为制动器关断的时刻t2为起点,在如上所述计算出的减速等级的切换速度(变化速度)下,减速等级从减速等级ii切换到减速等级iv的结果,在时刻t3,减速等级的切换(转移)即减速等级的更新完
成。
94.此外,本发明的实施方式中的“制动器返回速度”未必如上所述作为“期间t”中的减速度的变化梯度(变化速度)而计算。本发明的实施方式中的“制动器返回速度”也可以在进行了由驾驶员进行的制动器踏板5的操作(踩踏操作)的情况下,作为该制动器踏板5的操作返回时的任意的期间中的减速度的变化梯度而计算。即,“制动器返回速度”也可以作为从估算制动器最大操作量的时间点至成为制动器关断的时间点(时刻t2)为止的期间的任意的期间中的减速度的变化梯度而计算出。例如,也可以将从估算制动器最大操作量的时间点至时刻t2为止的期间中的减速度的变化梯度作为“制动器返回速度”而计算。
95.另外,在本发明的实施方式中,也可以如图8所示,从根据制动器返回速度预先设定的多个水准的变化速度求出减速等级的切换速度(变化速度)。在该图8所示的实施方式中,作为成比例地进行区域划分的三个水准的切换速度,设定有“0.5m/s3((m/s2)/s)”、“1.5m/s3((m/s2)/s)”以及“2.5m/s3((m/s2)/s)”。例如,在测定出的减速度的变化速度是“0.8m/s
3”的情况下,选择“0.5m/s
3”的切换速度,根据该切换速度,更新减速等级。或者,在测定出的减速度的变化速度是“2.3m/s
3”的情况下,选择“2.5m/s
3”的切换速度,根据该切换速度,更新减速等级。
96.在图2的流程图中的步骤s11中,如上所述计算减速等级的切换速度,并且以该计算出的切换速度更新减速等级。然后,根据在该步骤s11中更新后的减速等级,控制减速度。之后,暂且结束该图2的流程图所示的例程。
97.在图9的时序图中示出了如上所述控制器7执行的控制的具体的实施方式。在该图9的时序图所示的实施方式中,当前状况的减速等级被设定为减速等级ii。当在时刻t11,开始由驾驶员进行的制动器踏板5的踩踏操作(成为制动器接通)时,与其相应地,制动转矩增大(在图9所示的实施方式中,向图9的下方即负的方向增大)。与此一起,车辆ve的减速度增大(在图9所示的实施方式中,向图9的下方即负的方向增大)。在该图9的时序图所示的实施方式中,在“中间踩踏”的状态下,进行由驾驶员进行的制动器踏板5的操作。因而,在更新减速等级时,减速等级从当前状况的减速等级ii切换到高一个级别的减速等级iii。
98.从时刻t12附近开始返回制动器踏板5的踩踏,之后,在时刻t14,结束由驾驶员进行的制动器踏板5的踩踏操作(成为制动器关断)。在即将成为制动器关断的时刻t14之前的时刻t13,成为制动转矩超过预定值(“-60nm”)而接近“0”的状态,在该时刻t13与时刻14之间的期间,计算制动器返回速度。与该制动器返回速度对应地,计算相当于与制动器返回速度成比例的前述减速度的变化速度的、指示转矩的变化率。进而,与该指示转矩的变化率对应地,计算与制动器返回速度成比例的减速等级的切换速度。然后,在成为制动器关断的时刻t14以后,在如上所述计算出的减速等级的切换速度下,减速等级从减速等级ii切换到减速等级iii。
99.如该图9的时序图所示,通过由本发明的实施方式中的车辆ve的控制装置执行的控制,在“单踏板模式”下,即使在从时刻t11到时刻t14进行了制动器踏板5的踩踏操作的情况下,车辆ve的减速度也平滑地发生变化。特别是,在成为制动器关断的时刻t14的前后,车辆ve的减速度平滑地变化。
100.这样,在本发明的实施方式中的车辆ve的控制装置中,在驾驶员在“单踏板模式”下操纵车辆ve时,进行了基于驾驶员的制动器踏板5的操作的制动(制动器开关成为接通)
的情况下,根据此时的制动器踏板5的操作内容,更新用于设定目标减速度的减速等级(校正根据减速等级设定的减速度的值)。例如,根据制动器踏板5的操作量(踩踏量)来判断由驾驶员进行的制动器踏板5的操作状况,在该制动器踏板5的操作结束之后,更新减速等级。或者,根据制动器踏板5的操作量的大小,变更减速等级的切换幅度(减速等级的值的校正量),更新减速等级。或者,根据制动器踏板5的操作速度(制动器返回速度),变更减速等级的切换速度,更新减速等级。因而,根据本发明的实施方式中的车辆ve的控制装置,即使是“单踏板模式”,也能够进行考虑了制动器踏板5的操作内容的减速度的控制。因此,即使在驾驶员在使用了加速器踏板3的“单踏板模式”下操纵车辆ve时进行了基于制动器踏板5的操作的制动的情况下,也不对驾驶员造成不协调感,能够得到遵照驾驶员的意图的适当的减速度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。