1.本发明属于区域侦察价值评估领域,特别涉及一种基于语义认知的无人机区域侦察价值评估方法。
背景技术:
2.近年来,小型无人机作为侦察平台在局部战争与武装冲突中的应用越来越广。其中,在城市、丛林等障碍密布、视野受阻的对抗场景里进行侦察搜索是现代无人机侦查应用的主要模式之一。
3.当前对于无人机执行侦察搜索任务的研究多集中在无人机机群的指挥控制、任务与对抗资源分配、侦察搜索路径规划等无人机机群侦察能力与侦察效能的评估应用方面。对于在敌我对抗过程中根据敌我形势生成相应区域侦察需求的研究占比较少。目前对于侦察区域的决策主要依赖控制人员的实践经验,尚无成熟的模式分析与理论指导方法。因此,如何在复杂多变、障碍密布的城市对抗环境中明确侦察目标区域是一个至关重要而又亟待解决的问题。
技术实现要素:
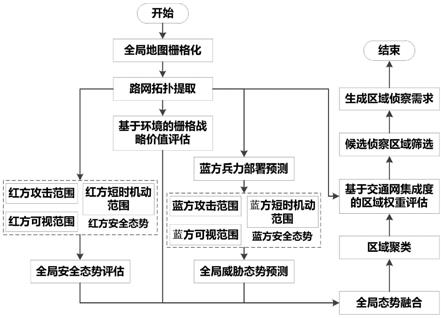
4.为此,本发明的目的在于避免背景技术中的问题提出一种基于语义认知的无人机区域侦察价值评估方法,通过将整个任务区域进行离散化,将障碍物属性、空间范围以及时空分布融入到全局交通环境语义认知体系中;然后在全局交通网络的基础上,结合敌我兵力部署、单元属性以及机动能力构建全局安全态势以及全局威胁态势理解语义认知模型,计算每个栅格位置的侦察价值;最后基于各栅格的侦察价值空间分布进行区域聚类,生成区域侦察需求,提升指挥人员对实际对抗态势的全面掌握,有利于对重点区域进行及时侦察。
5.本发明采用的技术方案为:
6.一种基于语义认知的无人机区域侦察价值评估方法,包括以下步骤:
7.(1)从红方角度出发,将全局区域范围进行栅格化处理,依据各栅格位置对应的建筑以及障碍物的分布,得到离散全局栅格集合gmap,并判断每个栅格的可通行性,在可通行栅格区域集合上提取可通行路网结构;
8.(2)假定红蓝双方只在障碍物外部进行活动,将各可通行栅格的通视性、隐蔽性、连通性以及周围障碍的抗毁损能力进行模糊化描述,然后设计模糊推理规则并进行语义推理,计算各栅格基础侦察战略价值;
9.(3)根据红方各单位的空间位置分布,基于机动能力、攻击能力以及可通行路网结构计算红方阵营的控制区域,并计算红方阵营面临的全局安全态势;
10.(4)基于当前对蓝方兵力分布的观测结果以及协同对抗先验知识,采用蒙特卡洛采样的策略模拟蓝方兵力部署方案,以每个方案对红方的威胁度作为方案被采用的概率值,计算各位置的威胁程度的期望,并作为全局威胁态势;
11.(5)综合各栅格基础侦察战略价值、全局安全态势和全局威胁态势,计算各栅格位置的侦察价值,根据侦察价值高于设定阈值的栅格的空间分布进行区域聚类得到候选侦察区域;
12.(6)依据各候选侦察区域所覆盖的实际区域的建筑、障碍物和路网的分布,计算每个候选区域的区域得分,并筛选出得分最大的所设定个数区域作为最终的区域侦察需求输出。
13.进一步的,步骤(3)包括如下步骤:
14.(301)计算每个红方单位对周围区域的控制区域:
[0015][0016]
式中,di∈d
red
,d
red
={d0,d1,...,d
n-1
},n为总的红方单位个数,g(xj,yk,di)表示红方单位di沿路网road
net
机动到位置(xj,yk)的最短距离,attack
radius
为红方单位攻击距离,α和β为常数,v0为红方单位移动速度,(xj,yk)∈gmap;
[0017]
(302)计算红方阵营全体单位的控制范围,即红方阵营的安全态势:
[0018][0019]
进一步的,步骤(4)包括如下步骤:
[0020]
(401)基于蓝方总兵力上限、蓝方初始分布区域、蓝方最大移动速度、当前推演时间以及当前已经观测到的蓝方兵力分布结合协同对抗经验,通过蒙特卡洛采样模拟得到当前蓝方可能的兵力部署方案x={x1,...,xi,...,xn},其中,},其中,表示某一种采用生成的部署方案,n表示生成的方案个数,,soldiers
blue
表示蓝方总兵力;
[0021]
(402)假设蓝方采取对红方威胁程度最大的兵力部署方案对红方进行攻击,依据蓝方单位的机动能力和攻击能力,对各可能的兵力部署方案xi的威胁区域计算方式如下:
[0022][0023]
式中,bi∈d
blue
,d
blue
={d0,d1,...,d
l-1
},l为总的蓝方单位个数,g(xj,yk,bi)表示蓝方单位bi沿路网road
net
机动到位置(xj,yk)的最短距离,attack
radius
为红方单位攻击距离,γ和δ为常数,v0为蓝方单位移动速度,(xj,yk)∈gmap;
[0024]
(403)将每种部署方案威胁度进行归一化得到蓝方采取对应方案的概率值p(xi);
[0025]
(404)综合每种部署方案的威胁度与被采用概率值,通过加权平均融合的方式得到基于当前未知蓝方单位的空间分布预测的威胁态势预测结果situation
threaten
:
[0026]
[0027]
进一步的,步骤(5)包括如下步骤:
[0028]
(501)将全局安全态势评估得分situation
safe
、全局威胁态势评估得分situation
threaten
和各栅格基础侦察战略价值评估得分situation
env
加权求和得到各栅格的侦察价值:
[0029][0030]
其中,ω
i,j
为各栅格的侦察价值;ω、θ表示各部分分值权重,且各分值权重ω、θ根据不同对抗局势、不同兵力对比、和不同对抗环境进行设定;
[0031]
(502)基于各栅格的侦察价值的空间分布进行密度聚类,得到高价值的候选侦察区域s,并对每个候选侦察区域si内各栅格的总体战略价值以及区域内的路网空间构型进行评估,得到每个候选侦察区域的区域侦察价值具体计算方式如下:
[0032][0033]
其中,m表示区域si内可通行栅格个数;ω
i,j
表示栅格a
i,j
的侦察价值且a
i,j
∈si;k表示区域si与其他全局部分连通的道路个数;表示区域的路网集成度,计算方式如下:
[0034][0035]
其中,r表示区域si内的路口集合,dist(rg,r
l
)
shortest
表示从路口rg到路口r
l
沿路网的最小加权距离;m表示区域内路口的个数。
[0036]
本发明的有益效果:
[0037]
本发明通过将全局地图离散化,将障碍物分布以及交通网络拓扑动态变化融入到全局交通环境语义认知中;基于敌我兵力属性以及机动能力构建全局安全态势以及全局威胁态势理解语义认知架构;最后基于各栅格的侦察价值空间分布进行区域聚类,生成区域侦察需求,提升指挥人员对实际对抗态势的全面掌握,对于重点区域侦察决策的自动化生成具备重要的参考与指导价值。
附图说明
[0038]
图1为本发明实施例中基于语义认知的无人机区域侦察价值评估方法流程示意图。
具体实施方式
[0039]
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
[0040]
本发明一种基于语义认知的无人机区域侦察价值评估方法针对的是现代城市对抗场景中全局区域的侦察价值语义认知的基础上实现小型无人机区域侦察任务自主生成的问题,因此需要设定全局基础建筑以及障碍物分布等基础环境信息,红蓝双方兵力以及
单元属性等兵力信息,以及红蓝双方初始分布区域等信息,具体包含以下步骤:
[0041]
(1)从红方角度出发,将全局区域范围进行栅格化处理,依据各栅格位置对应的建筑以及障碍物的分布,得到离散全局栅格集合gmap,并判断每个栅格的可通行性,在可通行栅格区域集合上提取可通行路网结构;具体包括以下步骤:
[0042]
(101)以原始全局地图size
global
左上顶点为原点,以水平方向为横轴,以垂直方向为纵轴,建立平面直角坐标系。以5m
×
5m的单元格将全局区域栅格化,得到离散全局栅格集合gmap={a
i,j
∈{0,1}},其中a
i,j
=1表示栅格a
i,j
可通行;反之,则不可通行。
[0043]
(102)在步骤(101)中,当栅格a
i,j
与障碍物ok不相交或者相交面积小于阈值area
intersect
时,判定栅格a
i,j
可通行,并将a
i,j
赋值为1。其中,当栅格a
i,j
与障碍物ok相交时,相交区域的面积通过定常积分计算。
[0044]
(103)以a
i,j
作为节点,以每个栅格与相邻栅格的可通达性为边,构建全局可通行图网络。计算每条边的介数,将介数相近的且在局部区域相连的边依据欧氏距离进行聚类,即可得到路网拓扑结构。
[0045]
(104)在(103)得到的路网拓扑上,按照连通性将各位置划分为“路口”、“路段”两类区域。其中,“路口”包含连通性、类别、面积、位置等属性;“路段”包含路宽、走向、级别、位置等属性。最终得到全局路网road
net
。
[0046]
(105)在本方法中,“路口”类型依其连通路段数又可进一步分为“丁字路口”、“十字路口”、“环岛路口”、“直角转弯路口”等;“路段”类型依该路段上的介数密度又可进一步分为“主干路”、“次干路”、“支路”等。
[0047]
(2)假定红蓝双方只在障碍物外部进行活动,将各可通行栅格的通视性、隐蔽性、连通性以及周围障碍的抗毁损能力进行模糊化描述,然后设计模糊推理规则并进行语义推理,计算各栅格基础侦察战略价值;具体包括以下步骤:
[0048]
(201)将路口或路段几点的联通路网节点数、路网节点的宽度、节点周围障碍物密度、障碍物类型、障碍物数量等作为自变量,将栅格战略价值作为因变量。依据模糊控制的一般方法,分别设定自变量与因变量的模糊集、取值等级范围以及相关隶属度矩阵。
[0049]
(202)按照一般常识经验设定对抗环境价值评估的基本模糊推理规则:
[0050]
①
某节点连通的其他区域节点越多,则该节点战略价值越高;
[0051]
②
某节点道路宽度越大、路面越平整,则该节点战略价值越高;
[0052]
③
若某节点周围存在特殊建筑(如仓库、医院等),则该节点战略价值越高;
[0053]
……
[0054]
(203)将上述模糊判断规则以“ifathanb”逻辑表达式的形式描述,并根据各栅格周围各自变量的取值及逆行模糊推理,之后根据因变量价值模糊集进行反模糊化,计算得到各栅格基础侦察战略价值的评估得分situation
env
。
[0055]
(3)根据红方各单位的空间位置分布,基于机动能力、攻击能力以及可通行路网结构计算红方阵营的控制区域,并计算红方阵营面临的全局安全态势;具体包括以下步骤:
[0056]
(301)计算每个红方单位对周围区域的控制区域:
[0057][0058]
式中,di∈d
red
,d
red
={d0,d1,...,d
n-1
},n为总的红方单位个数,g(xj,yk,di)表示红
方单位di沿路网road
net
机动到位置(xj,yk)的最短距离,attack
radius
为红方单位攻击距离,α和β为常数,v0为红方单位移动速度,(xj,yk)∈gmap;
[0059]
(302)计算红方阵营全体单位的控制范围,即红方阵营的安全态势:
[0060][0061]
(4)基于当前对蓝方兵力分布的观测结果以及协同对抗先验知识,采用蒙特卡洛采样的策略模拟蓝方兵力部署方案,以每个方案对红方的威胁度作为方案被采用的概率值,计算各位置的威胁程度的期望,并作为全局威胁态势;具体包括如下步骤:
[0062]
(401)基于蓝方总兵力上限、蓝方初始分布区域、蓝方最大移动速度、当前推演时间以及当前已经观测到的蓝方兵力分布结合协同对抗经验,通过蒙特卡洛采样模拟得到当前蓝方可能的兵力部署方案x={x1,...,xi,...,xn},其中,},其中,表示某一种采用生成的部署方案,n表示生成的方案个数;
[0063]
(402)假设蓝方采取对红方威胁程度最大的兵力部署方案对红方进行攻击,依据蓝方单位的机动能力和攻击能力,对各可能的兵力部署方案xi的威胁区域计算方式如下:
[0064][0065]
式中,bi∈d
blue
,d
blue
={d0,d1,...,d
l-1
},l为总的蓝方单位个数,g(xj,yk,bi)表示蓝方单位bi沿路网road
net
机动到位置(xj,yk)的最短距离,attack
radius
为红方单位攻击距离,γ和δ为常数,v0为蓝方单位移动速度,(xj,yk)∈gmap;
[0066]
(403)将每种部署方案威胁度进行归一化得到蓝方采取对应方案的概率值p(xi);
[0067]
(404)综合每种部署方案的威胁度与被采用概率值,通过加权平均融合的方式得到基于当前未知蓝方单位的空间分布预测的威胁态势预测结果situation
threaten
:
[0068][0069]
(5)综合各栅格基础侦察战略价值、全局安全态势和全局威胁态势,计算各栅格位置的侦察价值,根据侦察价值高于设定阈值的栅格的空间分布进行区域聚类得到候选侦察区域;具体包括如下步骤:
[0070]
(501)将全局安全态势评估得分situation
safe
、全局威胁态势评估得分situation
threaten
和各栅格基础侦察战略价值评估得分situation
env
加权求和得到各栅格的侦察价值:
[0071][0072]
其中,ω
i,j
为各栅格的侦察价值;ω、θ表示各部分分值权重,且各分值权重ω、θ根据不同对抗局势、不同兵力对比、和不同对抗环境进行设定;
[0073]
(502)基于各栅格的侦察价值的空间分布进行密度聚类,得到高价值的候选侦察
区域s,并对每个候选侦察区域si内各栅格的总体战略价值以及区域内的路网空间构型进行评估,得到每个候选侦察区域的区域侦察价值具体计算方式如下:
[0074][0075]
其中,m表示区域si内可通行栅格个数;ω
i,j
表示栅格a
i,j
的侦察价值且a
i,j
∈si;k表示区域si与其他全局部分连通的道路个数;表示区域的路网集成度,计算方式如下:
[0076][0077]
其中,r表示区域si内的路口集合,dist(rg,r
l
)
shortest
表示从路口rg到路口r
l
沿路网的最小加权距离;m表示区域内路口的个数。
[0078]
(6)依据各候选侦察区域所覆盖的实际区域的建筑、障碍物和路网的分布,计算每个候选区域的区域得分,并筛选出得分最大的所设定个数区域作为最终的区域侦察需求输出。
[0079]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。