用于sar实时成像的处理方法及处理芯片
技术领域
1.本发明涉及合成孔径雷达技术,具体涉及一种用于sar实时成像的处理方法及处理芯片。
背景技术:
2.合成孔径雷达(sar)具有全天时、全天候的遥感数据获取能力,成像不受光线、气候和云雾限制,目前已经成为高分辨率对地观测的重要手段之一。具有实时成像能力的无人机载sar系统,因为无人机平台作业灵活,可对目标实现低延时地实时成像,有效地动态监测,在应急和灾害等领域具有很高的实际应用价值。然而,由于小型无人机受其“体能”的限制,平台对载荷的重量、体积和功耗有着严格限制。因此,轻量化、微型化和低功耗成为无人机载sar系统的发展趋势。
3.将天线、射频前端、信号采集存储进行一体化集成的芯片sar,能够极大地降低合成孔径雷达系统的重量、体积、功耗和成本,在无人机载平台方面有巨大优势。近年来,基于半导体技术和异质封装技术的发展,国内外已有一些sar相关产品上市。
4.除了对sar系统的天线、射频前端和采集存储进行小型化轻量化研究,科研人员对实时成像处理方法也投入了大量研究。本发明的发明人申请过名称为“一种无人机sar成像方法及装置”的专利,授权号为“cn09655831b”,正是一种实时成像方法。目前已有的sar实时成像系统均是基于dsp(digital signal processing,dsp)或fpga(field programmable gate array,fpga)等通用处理芯片等实现。虽然通用信号处理芯片具有设计灵活性,但是功耗较大,且资源有限,计算能力满足不了高质量实时成像的需求,损失了图像信噪比使实时成像输出的图像质量远低于“计算机后处理”输出的图像质量,这极大地遏制了实时成像领域的发展。其次,通用芯片搭建的处理系统无法与sar进行芯片级别的集成,目前主流的sar实时成像处理系统,其处理算法都是基于dsp和fpga等通用信号处理芯片实现,体积大、功耗高、成本高,不能与芯片sar进行片上集成,不利于机载平台载荷体积的减小;且计算资源和计算速度受限较大,实时输出的图像质量差,分辨率低。另外,fpga和dsp芯片供应商均为国外厂商,芯片的供应没有保障,不利于芯片sar系统的发展。
技术实现要素:
5.(一)要解决的技术问题
6.基于此,本发明提出了一种用于sar实时成像的处理方法及处理芯片,能够对sar回波数据进行实时处理,再配合地面计算中心,实现高质量实时成像。
7.(二)技术方案
8.根据本发明的一个方面,提供了一种用于sar实时成像的处理方法和处理芯片,包括:
9.根据基于sar回波信号生成的一景图像中处理的方位向点数,确定积累的距离向脉冲个数;
10.针对每个距离向脉冲,根据无人机sar的飞行高度和天线俯仰向波束宽度,计算一景图像的有效幅宽;对sar回波信号进行去斜,得到去斜信号,确定去斜信号的频率中心及范围,通过cortex m0 模块对处理芯片进行配置,得到频谱搬移频率;
11.采用时域卷积对去斜信号进行处理,并基于所述频谱搬移频率将处理后的去斜信号搬移至中心,得到中心信号;
12.采用滤波器对中心信号进行滤波,生成第一脉冲信号;
13.根据距离向压缩比例对第一脉冲信号进行距离向抽取,以生成第二脉冲信号;
14.采用时域卷积将第二脉冲信号的生成图像搬移至最近斜距处,进行一景图像数据的累计;
15.将一景图像数据方位向傅立叶变换至方位频域,得到方位数据;
16.根据方位数据计算多普勒带宽,与sar的发射脉冲重复频率进行比较,计算sar的发射脉冲重复频率的过采样倍数数据;
17.根据过采样倍数数据进行方位截取,得到处理数据;
18.对处理数据进行量化,得到成像数据。
19.还包括:通过处理器启动sar程序的预载程序,执行启动sar程序进行应用程序搬移以及芯片自动初始化配置;
20.根据sar程序的系统参数,计算相关处理参数,并对处理算法asic进行参数配置。
21.芯片自动初始化配置包括时钟配置、管脚复用配置、中断配置及外设配置。
22.距离向压缩比例根据数据压缩需求、硬件传输和处理能力确定。
23.方位数据包括平台速度、方位波束宽度、雷达中心下视角、雷达发射信号的波长。
24.距离向压缩比例大于一景图像有效带宽与采样率的比值。
25.根据本发明的一个方面,提供了一种用于sar实时成像的处理方法的处理芯片,包括:
26.adc模块,对sar回波信号进行采集,将模拟信号形式的sar回波转化为数字信号形式,基于一景图像中处理的方位向点数,确定积累的距离向脉冲个数,将方位向点数记为na,则积累的距离向脉冲个数为na,将每一个距离向脉冲依序传输至循环模块;
27.循环模块,包括复数转换单元、第一移位复乘单元、fir滤波单元、抽取单元和第二移位复乘单元;
28.其中,复数转换单元用于针对每个距离向脉冲,将整形数据转化为单精度浮点型数据;根据无人机sar的飞行高度和天线俯仰向波束宽度,计算一景图像的有效幅宽;对sar回波信号进行去斜,得到去斜信号,确定去斜信号的频率中心及范围,通过cortex m0 模块对处理芯片进行配置,得到频谱搬移频率;
29.第一移位复乘单元用于通过时域卷积对去斜信号进行处理,并基于频谱搬移频率将处理后的去斜信号搬移至中心,得到中心信号;
30.fir滤波单元用于采用滤波器对中心信号进行滤波,生成第一脉冲信号;
31.抽取单元用于根据距离向压缩比例对第一脉冲信号进行距离向抽取,以生成第二脉冲信号;
32.第二移位复乘单元用于采用时域卷积将第二脉冲信号的生成图像搬移至最近斜距处,进行一景图像数据的累计,并将一景图像数据存入ddr中,计算存入ddr的列的个数;
若存入ddr的列个数等
33.于na时,进入fft模块,否则重复循环模块;
34.fft模块,用于读取ddr中存储的一景图像数据,并将一景图像数据进行fft计算,根据方位数据计算多普勒带宽,与sar的发射脉冲重复频率进行比较,计算sar的发射脉冲重复频率的过采样倍数数据;以及用于对过采样倍数数据进行方位截取,得到处理数据,并将处理数据存入ddr中;
35.量化及tcp传输模块,用于读取ddr中存储的处理数据并对处理数据进行量化得到成像数据,将成像数据发送至tcp传输模块。
36.循环模块,用于循环计算adc模块中积累的距离向脉冲,循环次数等于na;
37.其中,复数转换单元,还用于采用fifo缓存器积累距离向脉冲,将每个距离向脉冲的数据点数分别记作nr点数据;
38.复数转换单元,还用于将nr点数据转化为单精度浮点型;
39.第一移位复乘单元,并通过位移寄存器与两路余弦函数相乘,输出中心信号;
40.fir滤波单元,还用于对中心信号进行fir滤波,并转为单精度浮点型,输出第一脉冲信号;
41.第二移位复乘单元,还用于将第二脉冲信号通过位移寄存器与两路余弦函数相乘,得到一景图像数据;以及用于对一景图像数据进行计数产生对应的图像地址,将图像地址按列存入ddr中。
42.fft模块,还用于将一景图像数据的每行的数据点数记为na;对na点进行fft计算,得到方位数据;对方位数据输出并计数,计数的结果作为数据地址,按数据地址进行数据搬移,即每行先输出的(na/2)点数据存入的数据地址为(na/2)至na,后输出的(na/2)点数据存入的数据地址为0至(na/2-1),输出过采样倍数。
43.量化及tcp传输模块,包括:
44.量化单元,用于读取ddr中存储的处理数据,并对处理数据进行量化,将每个处理数据的虚实部转换为16位有符号数,得到成像数据;
45.tcp传输单元,用于将成像数据发送至tcp传输模块,将成像数据传出。
46.(三)有益效果
47.本发明通过小型无人机的芯片上设置的处理模块进行图像的采集和初步处理,能够保证实时传输过程中的图像精度,保留更多有用的图像特征,提高传输数据的有效性,提高分辨率,为实时输出质量好、分辨率高的sar图像提供数据保障;能够便于后续的进一步处理。
附图说明
48.图1是本发明用于sar实时成像的处理芯片的处理算法图;
49.图2是本发明用于sar实时成像的处理芯片的工作流程图;
50.图3是本发明用于sar实时成像的处理芯片的数据流程图;
51.图4是本发明用于sar实时成像的处理芯片的芯片架构图;
52.图5是本发明用于sar实时成像的处理芯片实时成像质量与计算机后成像质量对比图。
具体实施方式
53.为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明作进一步的详细说明。
54.图1是本发明用于sar实时成像的处理芯片的处理算法图。
55.图2是本发明用于sar实时成像的处理芯片的工作流程图。
56.图3是本发明用于sar实时成像的处理芯片的数据流程图。
57.如图1所示,根据本发明的一个方面,提供了一种用于sar实时成像的处理方法,包括:
58.根据基于sar回波信号生成的一景图像中处理的方位向点数,确定积累的距离向脉冲个数。
59.合成孔径雷达(synthetic aperture radar,sar)被装载在无人机上,向被探测物体发送脉冲信号,脉冲信号被将反射回sar,即sar回波信号,预处理端接收sar回波信号、及无人机sar系统的参数等数据,以对这些数据进行处理。
60.针对每个距离向脉冲,根据无人机sar的飞行高度和天线俯仰向波束宽度,计算一景图像的有效幅宽;对sar回波信号进行去斜,得到去斜信号,确定去斜信号的频率中心及范围,通过cortex m0 模块对处理芯片进行配置,得到频谱搬移频率。
61.采用时域卷积对去斜信号进行处理,并基于频谱搬移频率将处理后的去斜信号搬移至中心,得到中心信号。
62.采用滤波器对中心信号进行滤波,生成第一脉冲信号。
63.根据距离向压缩比例对第一脉冲信号进行距离向抽取,以生成第二脉冲信号。
64.采用时域卷积将第二脉冲信号的生成图像搬移至最近斜距处,进行一景图像数据的累计。
65.将一景图像数据方位向傅立叶变换至方位频域,得到方位数据。
66.根据方位数据计算多普勒带宽,与sar的发射脉冲重复频率进行比较,计算sar的发射脉冲重复频率的过采样倍数数据。
67.根据过采样倍数数据进行方位截取,得到处理数据。
68.对处理数据进行量化,得到成像数据。
69.在sar成像算法中,例如距离多普勒算法,利用距离向处理和方位向处理在一定条件下的可去耦性,将成像处理简化为两个一维脉冲的压缩过程,即距离压缩和方位压缩。
70.本发明实现sar回波数据的实时处理,并且将处理后数据转发至无线数据传输模块,然后可传回地面控制计算中心进行成像,能够有效地压缩sar回波数据,使其传输数据速率达到无线数据传输实时传输的要求,同时不过分丢失sar回波图像特征,保证成像质量,处理算法简洁,减少复杂计算,使其容易基于asic实现。
71.本发明通过小型无人机的芯片上设置的处理模块进行图像的采集和初步处理,能够保证实时传输过程中的图像精度,保留更多有用的图像特征,提高传输数据的有效性,提高分辨率,为实时输出质量好、分辨率高的sar图像提供数据保障。
72.根据本发明的实施例,地面还设有精处理端,用于接收无人机上传回的数据包,数据包中包含系统参数、p0s数据和处理数据,地面高精度成像单元首先进行数据解包,然后针对这些数据,采用高精度的成像处理方法,生成清晰的sar图像。
73.根据本发明的实施例,通过处理器启动sar程序的预载程序,执行启动sar程序进行应用程序搬移以及芯片自动初始化配置;
74.根据sar程序的系统参数,计算相关处理参数,并对处理算法asic进行参数配置。
75.根据本发明的实施例,芯片自动初始化配置包括时钟配置、管脚复用配置、中断配置及外设配置。
76.在芯片实际工作的过程中,cortex m0 处理器可以通过apb总线对预处理算法asic内部寄存器进行配置,从而实现对预处理关键参数的动态配置。同时处理器与预处理算法asic内部的tcp传输模块通过总线及中断信号进行交互,实现处理器与远程主机的通信功能。系统可以通过uart、gpio等外设与片外其它设备进行交互与控制。
77.根据本发明的实施例,距离向压缩比例根据数据压缩需求、硬件传输和处理能力确定。
78.处理芯片设于无人机上,主要用于对sar回波信号进行处理,在满足sar系统分辨率和成像质量的前提下,通过数据压缩和硬件传输,降低其传输速率。
79.根据本发明的实施例,方位数据包括平台速度、方位波束宽度、雷达中心下视角、雷达发射信号的波长。
80.通过平台速度(v)、方位波束宽度(θ
bw
)、雷达中心下视角(θ
rc
)、雷达发射信号的波长(λ)等方位数据能够计算多普勒带宽(δf
dop
),计算公式为δf
dop
=2*v*cos(θ
rc
)*θ
bw
/λ,然后与雷达发射脉冲重复频率(prf)进行比较,计算prf过采样倍数(α
os
),α
os
=prf/δf
dop
。再以多普勒频率为中心,进行方位向截取,截取的点数与原数据的比例大于过采样倍数的倒数。
81.根据本发明的实施例,距离向压缩比例大于一景图像有效带宽与采样率的比值。
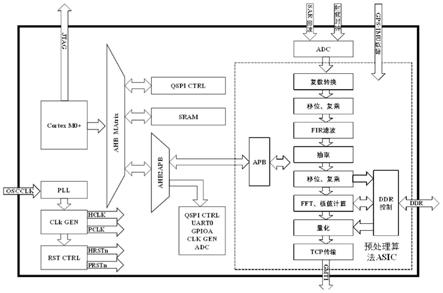
82.图4是本发明用于sar实时成像的处理芯片的芯片架构图。
83.本发明设计的芯片架构如图4所示,主要部分实现的功能描述如下:
84.处理算法asic
‑‑‑
实现图1所示的sar实时成像处理算法;
85.adc
‑‑‑
模数转化器,对sar回波进行采集和量化,将其转换为数字信号;
86.cortex m0
‑‑‑
实现芯片时钟管理、系统外设控制、算法模块配置与控制;
87.pll
‑‑‑
提供与片外晶振相参的时钟信号;
88.clk gen
‑‑‑
生成各个时钟域的时钟,并进行时钟门控管理;
89.rst ctrl
‑‑‑
对片外复位信号在各个时钟域进行同步,异步复位同步释放;
90.qspi ctrl
‑‑‑
对片外flash芯片进行控制;
91.sram
‑‑‑
存放代码段及数据段程序;
92.uart
‑‑‑
实现串口收发;
93.gpio
‑‑‑
通用输入输出;
94.ahb
‑‑‑
总线互联;
95.adc
‑‑‑
实现sar回波信号的采集。
96.在芯片实际工作的过程中,cortex m0 处理器可以通过apb总线对处理算法asic内部寄存器进行配置,从而实现对处理关键参数的动态配置。同时处理器与处理算法asic内部的tcp传输模块通过总线及中断信号进行交互,实现处理器与远程主机的通信功能。系统可以通过uart、gpio等外设与片外其它设备进行交互与控制。
97.如图4所示,根据本发明的另一个方面,还提供了一种用于sar实时成像的处理芯片,包括:adc模块、循环模块、fft模块和量化及tcp传输模块。
98.adc模块,对sar回波信号进行采集,将模拟信号形式的sar回波转化为数字信号形式,基于一景图像中处理的方位向点数,确定积累的距离向脉冲个数,将方位向点数记为na,则积累的距离向脉冲个数为na,将每一个距离向脉冲依序传输至循环模块。
99.合成孔径雷达(synthetic aperture radar,sar)被装载在无人机上,向被探测物体发送脉冲信号,被将脉冲信号反射回sar,即sar回波信号,预处理端接收sar回波信号、及无人机sar系统的参数等数据,以对这些数据进行处理。
100.循环模块,包括复数转换单元、第一移位复乘单元、fir滤波单元、抽取单元和第二移位复乘单元;
101.其中,复数转换单元用于针对每个距离向脉冲,将整形数据转化为单精度浮点型数据;根据无人机sar的飞行高度和天线俯仰向波束宽度,计算一景图像的有效幅宽;对sar回波信号进行去斜,得到去斜信号,确定去斜信号的频率中心及范围,通过cortex m0 模块对处理芯片进行配置,得到频谱搬移频率;
102.第一移位复乘单元用于通过时域卷积对去斜信号进行处理,并基于频谱搬移频率将处理后的去斜信号搬移至中心,得到中心信号;
103.fir滤波单元用于采用滤波器对中心信号进行滤波,过滤掉超过设定临界值的高频信号,生成第一脉冲信号;
104.抽取单元用于根据距离向压缩比例对第一脉冲信号进行距离向抽取,以生成第二脉冲信号;
105.若脉冲重复频率过采样倍数大于预设值,则需要对sar回波信号进行方位向脉冲抽取,若脉冲重复频率过采样倍数小于或等于预设值,则不需要对sar回波信号进行方位向脉冲抽取。
106.第二移位复乘单元用于采用时域卷积将第二脉冲信号的生成图像搬移至最近斜距处,进行一景图像数据的累计,并将一景图像数据存入ddr中,计算存入ddr的列的个数;若存入ddr的列个数等于na时,进入fft模块,否则重复循环模块;
107.fft模块,用于进行快速傅氏变换(fft)用于读取ddr中存储的一景图像数据,并将一景图像数据进行fft计算,根据方位数据计算多普勒带宽,与sar的发射脉冲重复频率进行比较,计算sar的发射脉冲重复频率的过采样倍数数据;以及用于对过采样倍数数据进行方位截取,得到处理数据,并将处理数据存入ddr中;
108.量化及tcp传输模块,用于读取ddr中存储的处理数据并对处理数据进行量化得到成像数据,将成像数据发送至tcp传输模块。
109.本发明提供的处理芯片,属于专用集成电路芯片,该芯片可以与sar进行板级或者片上集成,再配合地面计算中心,实现高质量实时成像。通过小型无人机的芯片上设置的处理模块进行图像的采集和初步处理,能够保证实时传输过程中的图像精度,保留更多有用的图像特征,提高传输数据的有效性,提高分辨率,为实时输出质量好、分辨率高的sar图像提供数据保障。
110.根据本发明的实施例,循环模块,用于循环计算adc模块中积累的距离向脉冲,循环次数等于na;
111.其中,复数转换单元,还用于采用fifo缓存器积累距离向脉冲,将每个距离向脉冲的数据点数分别记作nr点数据;
112.复数转换单元,还用于将nr点数据转化为单精度浮点型;
113.第一移位复乘单元,通过位移寄存器与两路余弦函数相乘,输出中心信号;
114.fir滤波单元,通过非递归型滤波器(fir滤波器)对中心信号进行fir滤波,并转为单精度浮点型,输出第一脉冲信号;
115.第二移位复乘单元,还用于将第二脉冲信号通过位移寄存器与两路余弦函数相乘,得到一景图像数据;以及用于对一景图像数据进行计数产生对应的图像地址,将图像地址按列存入ddr中。
116.在进入fir滤波器前,首先要将信号通过a/d器件进行模数转换,把模拟信号转化为数字信号;为了使信号处理能够不发生失真,信号的采样速度必须满足香农采样定理,首先采用数字下变频处理(ddc)技术降低中心信号的频率,进而降低后续对脉冲信号的采样率的目的,而后对其进行低通滤波以实现对中心信号的滤波。根据sar的发射距离和sar天线的俯仰向波束宽度,计算sar回波信号经过解线性调频处理后的频率范围,以对中心信号进一步压缩,得到一串序列,将该序列经过数模转换,即可得到第一脉冲信号。
117.根据本发明的实施例,fft模块,用于进行快速傅氏变换(fft)还用于将一景图像数据的每行的数据点数记为na;对na点进行fft计算,得到方位数据;对方位数据输出并计数,计数的结果作为数据地址,按数据地址进行数据搬移,即每行先输出的(na/2)点数据存入的数据地址为(na/2)至na,后输出的(na/2)点数据存入的数据地址为0至(na/2-1),输出过采样倍数。
118.对一景图像数据进行快速傅里叶变换(fft)生成压缩的距离向脉冲信号,即方位数据,实现对距离向脉冲信号的压缩。计算sar脉冲波束照射范围内sar斜距变化的范围,在方位数据中截取斜距变化范围之外的图像,累积多个方位数据,对多个方位数据的方位向进行方向向fft,重复处理,多个方位数据的方位向进行方位向fft以将多个方位数据变换到距离-多普勒域,生成处理数据。
119.根据本发明的实施例,量化及tcp传输模块,包括:
120.量化单元,用于读取ddr中存储的处理数据,并对处理数据进行量化,将每个处理数据的虚实部转换为16位有符号数,得到成像数据;
121.tcp传输单元,用于将成像数据发送至tcp传输模块,将成像数据传出。
122.计算处理数据的数据传输速率,若此时数据传输速率满足小于或等于预设传输速率,则满足向精处理端发送的要求,则将其和无人机sar装置参数一起打包发送至精处理端;若计算的数据传输速率大于预设传输速率,不满足要求向精处理端发送的要求,则需要再次通过fft模块对成像数据进行方位向截取以使成像数据小于或等于预设传输速率,进一步降低数据传输速率。
123.图5是本发明用于sar实时成像的处理芯片实时成像质量与计算机后成像质量对比图。
124.(a)原始数据计算机后处理成像结果;
125.(b)本发明处理压缩后数据成像结果。
126.如图5所示,图5为sar用无人机挂载实际飞行得到的数据,本实施例采用的sar系
统,发射波形的prf为2500,回波的采样率为50mbps/s,则一个距离向脉冲点数为50
×
106/2500=20000,以积累16384个距离脉冲作为一景图像,sar挂载飞行结束后,返回地面,将sar回波的原始数据传输至后端的高算力计算机,采用高算力计算机处理sar原始数据,进行后期成像,成像结果如图5(a)所示。
127.同一景图像的sar回波原始数据,用本发明提供的用于sar实时成像的处理方法进行处理,处理后一景图像数据点数压缩为4096
×
4096,相比于20000
×
16384点的原始数据,数据压缩了近20倍。处理后的成像数据实时传输到计算机进行进一步成像处理,成像结果如图5(b)所示。
128.分析两幅图的熵和对比度,本发明的成像结果相对于原始数据用计算机后处理的高精度成像结果,图像熵略微增加(变化0.6%),对比度有减小(9%),说明图像质量稍有下降,但是可以忽略,视觉几乎无法分别。说明本发明配合无线数据传输设备,可以实现无人机sar高精度实时成像。
129.本发明通过小型无人机的芯片上设置的处理模块进行图像的采集和初步处理,能够保证实时传输过程中的图像精度,保留更多有用的图像特征,提高传输数据的有效性,提高分辨率,为实时输出质量好、分辨率高的sar图像提供数据保障。
130.在发明提供的具体实施方式中,预处理芯片的距离向数据抽取比例、方位向数据截取位置可以根据sar系统参数调整;除了无人机载芯片sar外,本发明同样适用于其他测绘带宽较窄的微小型sar,车载sar等。
131.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。