托盘传送机
1.本技术是2020年2月6日提交的、名称为“托盘传送机”、申请号为202010081995.4的中国专利申请的分案申请。
技术领域
2.本发明的示例性实施方案整体涉及材料处理系统,并且更具体地涉及用于处理托盘的自动化存储和取回系统。
背景技术:
3.在高容量分配和履行中心,托盘处理方法和系统在分配中心的整体效率中起重要作用。托盘通常与拾取和放置系统一起使用,以存储和/或传送货物,诸如搬运箱、盒子、包裹等等。用于拾取和/或放置操作的托盘的自动取回、传送和放置对于提高分配中心的效率是必要的。
4.申请人已识别出与托盘处理相关联的若干技术挑战以及其他相关联的系统和方法。通过所付努力、智慧和创新,包括在本发明的实施方案中的开发解决方案已经克服了许多这些识别的挑战,本文详细描述了这些解决方案的许多示例。
技术实现要素:
5.下文给出了简要发明内容,以提供对所公开的托盘传送机的一些方面的基本理解。该发明内容不是详尽综述,并且既非旨在识别关键元件或重要元件,亦非描写此类元件的范围。其目的在于作为后文所提供的具体实施方式的序言,以简化形式给出所述特征的一些概念。
6.本公开的示例性实施方案涉及用于在材料处理环境中处理托盘的系统和方法。根据本公开的至少一个方面,提供了一种基于托盘的自动化存储和取回系统。基于托盘的自动化存储和取回系统可包括用于沿传送平面传送多个托盘的传送机系统。所述多个托盘可作为具有第一尺寸的第一组定位在一起,并且所述多个托盘中的至少一个托盘可包括形成在所述至少一个托盘的表面中的一个或多个狭槽。基于托盘的自动化存储和取回系统还可包括至少一个托盘定位器组件,所述托盘定位器组件被定位成与具有一个或多个导销组件的传送平面相邻。所述一个或多个导销组件可包括一个或多个导销以接合所述至少一个托盘的所述一个或多个狭槽。所述至少一个托盘定位器组件可包括至少一个平移致动器,所述至少一个平移致动器可操作地联接到所述一个或多个导销组件并且被配置为移动插入到所述一个或多个狭槽中的所述一个或多个导销,以便平移所述至少一个托盘,使得所述至少一个托盘的平移可以将具有第二尺寸的第二组托盘沿着传送平面从第一组托盘分离到第二位置,以便减小与第一组托盘相关联的公差累积。
7.根据本公开的一个或多个实施方案,所述至少一个平移致动器可以通过将插入到所述一个或多个狭槽中的所述一个或多个导销从起始位置移动到结束位置来将所述多个托盘分离成具有第二尺寸的第二组。此外,在一个实施方案中,第二组可以小于第一组。
8.根据本公开的一个或多个实施方案,基于托盘的自动化存储和取回系统可以包括周期性地定位在传送平面下面的至少两个托盘定位器组件,所述至少两个托盘定位器组件分开预定距离,使得所述预定距离可以与所述至少一个托盘的尺寸的倍数成比例。此外,在一个实施方案中,第一托盘定位器组件可以在第一方向上移动第一托盘定位器组件的一个或多个导销,并且第二托盘定位器组件可以在第二方向上移动第二托盘定位器组件的一个或多个导销,使得第二方向与第一方向相反。
9.根据本公开的一个或多个实施方案,基于托盘的自动化存储和取回系统还可以包括一个或多个传感器,以检测所述多个托盘中的每一个在传送机系统上的位置。
10.根据本公开的一个或多个实施方案,基于托盘的自动化存储和取回系统还可包括控制器。所述控制器可以检测用于致动所述至少一个托盘定位器组件的触发事件,将所述一个或多个导销垂直地延伸到所述至少一个托盘的所述一个或多个狭槽中,以及致动平移致动器以平移所述至少一个托盘,使得所述至少一个托盘的平移可以将具有第二尺寸的第二组托盘沿着传送平面从第一组托盘分离到第二位置,以便减小与第一组托盘相关联的公差累积。
11.根据本公开的另一方面,提供了用于在基于托盘的自动化存储和取回系统中对准一个或多个托盘的托盘定位器组件。所述托盘定位器组件可以包括一个或多个导销组件,所述一个或多个导销组件具有一个或多个导销,用于与形成在所述一个或多个托盘中的至少一个托盘的表面中的一个或多个狭槽接合。所述托盘定位器组件还可包括至少一个平移致动器,所述至少一个平移致动器可操作地联接到所述一个或多个导销组件,用于移动插入到所述一个或多个狭槽中的所述一个或多个导销,以便平移所述至少一个托盘,使得所述至少一个托盘的平移可以将具有第二尺寸的第二组托盘沿着传送平面从具有第一尺寸的第一组托盘分离到第二位置,以便减小与第一组托盘相关联的公差累积。
12.根据本公开的一个或多个实施方案,所述托盘定位器组件还可包括活动联接到平移致动器的安装板。所述安装板可安装所述一个或多个导销组件,使得平移致动器可移动安装板以将插入到所述一个或多个狭槽中的所述一个或多个导销从起始位置移动到结束位置。在一个实施方案中,所述安装板可包括至少两个导销组件,所述至少两个导销组件安装在安装板的每个端部处,具有将被插入到所述至少一个托盘的至少两个狭槽中的至少两个导销。
13.根据本公开的一个或多个实施方案,所述平移致动器可包括由驱动组件驱动的带式致动器。
14.根据本公开的一个或多个实施方案,所述平移致动器可以在第一方向和第二方向上移动所述一个或多个导销,使得第二方向与第一方向相反。
15.根据本公开的一个或多个实施方案,所述一个或多个导销组件还可包括至少一个致动器,用于将所述一个或多个导销延伸到所述一个或多个狭槽中,并且用于将所述一个或多个导销回缩到初始位置。
16.根据本公开的一个或多个实施方案,所述托盘定位器组件还可包括一个或多个接近传感器,用于检测所述至少一个托盘的所述一个或多个狭槽的位置和/或所述一个或多个导销的延伸和/或回缩位置。
17.根据本公开的另一方面,提供了一种操作基于托盘的自动化存储和取回系统的方
法。所述方法可包括沿传送平面传送多个托盘,使得所述多个托盘作为具有第一尺寸的第一组定位在一起,并且所述多个托盘中的至少一个托盘包括形成在所述至少一个托盘的表面中的一个或多个狭槽。所述方法还可包括由基于托盘的自动化存储和取回系统的控制器检测用于致动定位在传送机系统下方的托盘定位器组件的触发事件。所述方法还可包括使托盘定位器组件的一个或多个导销组件的一个或多个导销与所述至少一个托盘的所述一个或多个狭槽接合,以及通过可操作地联接到所述一个或多个导销组件的平移致动器平移所述至少一个托盘,使得所述至少一个托盘的平移可以将具有第二尺寸的第二组托盘沿着传送平面从第一组托盘分离到第二位置,以便减小与第一组托盘相关联的公差累积。
18.根据本公开的一个或多个实施方案,所述方法还可包括通过将插入到所述一个或多个狭槽中的一个或多个导销从起始位置移动到结束位置从而将所述多个托盘分离成具有第二尺寸的第二组,使得第二组小于第一组。
19.根据本公开的一个或多个实施方案,触发事件可包括由基于托盘的自动化存储和取回系统的一个或多个传感器提供的所述至少一个托盘被定位成与托盘定位器组件相邻的指示。
20.根据本公开的一个或多个实施方案,触发事件可包括由基于托盘的自动化存储和取回系统的一个或多个传感器提供的在传送机平面上接收所述多个托盘的指示。
21.根据本公开的一个或多个实施方案,触发事件可包括由基于托盘的自动化存储和取回系统的一个或多个传感器提供的所述至少一个托盘与所确定的位置不对准的指示。
22.根据本公开的一个或多个实施方案,所述方法还可包括由控制器至少基于所述至少一个托盘与所确定的位置的不对准程度来确定结束位置。
23.提供上述发明内容仅是为了概述一些示例性实施方案的目的,以提供对本公开一些方面的基本了解。因此,应当理解,上述实施方案仅为示例并且不应理解为以任何方式缩小本公开的范围或实质。应当理解,除了这里总结的那些,本公开的范围还涵盖了很多可能的实施方案,这些实施方案中的一些实施方案将在下面进一步描述。
附图说明
24.可结合附图阅读例示性实施方案的描述。应当理解,为了说明的简单和清晰,图中所示的元件不一定按比例绘制。例如,元件中的一些元件的尺寸相对于其他元件被夸大。结合本公开的教导的实施方案相对于文中给出的附图示出和描述,在附图中:图1示出了根据本公开的实施方案的基于托盘的自动化存储和取回系统的透视图;图2示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统的另一个透视图;图3a示出了根据本公开的一个或多个实施方案的托盘定位器组件的透视图;图3b示出了根据本公开的一个或多个实施方案的托盘定位器组件的剖视图;图4示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统的又一个透视图;图5示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统的控制器的示意性框图;并且
图6示出了根据本公开的一个或多个实施方案的用于操作基于托盘的自动化存储和取回系统的示例性方法。
具体实施方式
25.在下文中将参考附图更全面地描述本发明的一些实施方案,附图中示出了本发明的一些实施方案,但未示出全部实施方案。实际上,本公开可以以许多不同的形式体现,并且不应该被解释为限于本文阐述的实施方案;相反,提供这些实施方案是为了使本公开满足适用的法律要求。除非另外指明,否则术语“或”和“任选地”在另选和结合意义上均用于本文。术语“例示性”和“示例性”用于是没有质量水平指示的示例。在全篇内容中,类似的标号指代类似的元件。
26.附图中示出的部件表示在本文描述的本发明的各种实施方案中可以存在或可以不存在的部件,使得实施方案可以包括比图中所示的部件更少或更多的部件,而不脱离本发明的范围。
27.现在转到附图,下文结合附图示出的具体实施方式旨在描述各种构型并且不旨在表示其中可实践本文所述概念的唯一构型。具体实施方式包括具体细节,以用于提供对各种概念的全面理解,其中类似的附图标记表示在整个几个视图中类似的部件。然而,对于本公开领域的技术人员显而易见的是,可以在没有这些具体细节的情况下实践这些概念。
28.如上所述,在传统的分配和/或订单履行中心中,托盘通常用于存储物品、用于临时处理和/或用于传送到拾取和/或放置站。通常,分配和/或订单履行中心可包括基于托盘的存储和取回系统。基于托盘的存储和取回系统可具有在传送机上的多个托盘,所述多个托盘彼此抵靠推动以针对每个拾取和/或放置循环偏移位置。传统的拾取和/或放置系统可以包括一组夹持器,该组夹持器被编程为自动地从托盘拾取物品和/或将物品放置到托盘中。因此,该组夹持器可以以取决于托盘尺寸和/或位置的节距定位。托盘尺寸、位置和/或取向的任何偏差都可能导致托盘的堵塞或其他碰撞和/或托盘上物品的错位。
29.此外,在分配和/或订单履行中心的典型存储系统中,温度和/或其他环境条件可能变化。因此,托盘的尺寸可能易于由于托盘材料的至少热膨胀或压缩而发生变化。当一排若干个托盘在传送机系统上被推动到一起时,每个托盘尺寸的这些变化可能导致与期望的托盘位置的非常大的差异(例如,因托盘的数量而复合)。如上所述,这些差异可导致夹持器或其他元件与托盘的对应元件不对准,从而导致托盘的堵塞和/或物品的错位。因此,本技术的设备提供一种外部设备,该外部设备可重新定位托盘以减小这些差异(例如,公差累积),以提供精确对准、可重复的拾取和放置处理。
30.根据本公开的一个或多个实施方案,本文所述的基于托盘的存储和取回系统包括托盘定位器组件,所述托盘定位器组件用于重新定位托盘以校正与期望托盘位置的任何不对准和/或将托盘从大尺寸的一组托盘分离成一个或多个小尺寸组。
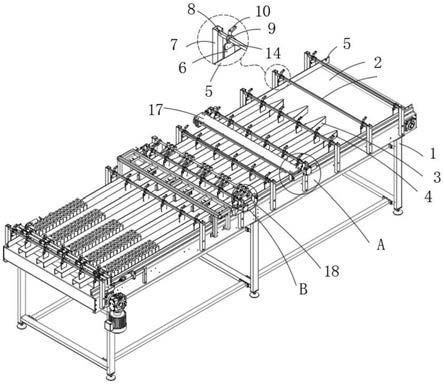
31.图1示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统100的透视图。如图1所示,基于托盘的自动化存储和取回系统100可包括用于传送托盘105的传送机系统110。在一个实施方案中,传送机系统105可以接收从存储单元(未示出)取回的托盘110以用于拾取和/或放置操作。也就是说,传送机系统105可以将托盘110传送和/或定位在特定的拾取和放置位置,使得拾取器(例如,机器人臂)可以从托盘110拾取物品
和/或将物品放置到托盘中。附加地或另选地,机器人臂可以抓取和/或提升一个或多个托盘110和/或产品而离开定位在特定位置的托盘110的表面。传送机系统105可包括用于传送托盘110的任何装置,诸如但不限于带式传送机、辊式传送机、滑动导轨、惰辊导轨等。在示例性实施方案中,传送机系统105可包括传送机框架和沿着传送机框架的至少一侧设置的多个辊,使得所述多个辊可以支撑并且在传送方向上向前移动托盘110。因此,托盘110可由传送机系统105支撑并沿传送平面115传送。
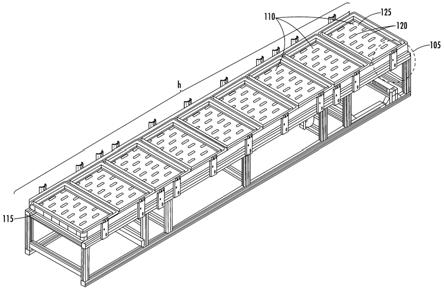
32.此外,如图1所示,传送机系统105可以将一组托盘110以料块的形式接收在一起(例如,基本上端对端定位的托盘110的集合)。在一个实施方案中,传送机系统105可以沿着传送平面115接收和/或传送具有第一尺寸n的第一组中的托盘110,如图1所示。在示例性实施方案中,尺寸为n的第一组可包括由传送机系统105接收和/或推动在一起的九个托盘110(例如,以料块的形式)。应当指出的是,如上所述的术语尺寸可以指取决于系统应用的任何尺寸。如上所述,推动和/或传送托盘110的料块可导致一个或多个托盘110的当前位置与期望位置(诸如预定的拾取和放置位置)之间的一定程度的不对准。根据本公开,对于本领域普通技术人员来说显而易见的是,归因于每个托盘110的差异的不对准的可能性在本文中可以被称为公差累积(例如,公差不对准的复合)。
33.此外,托盘110可包括由托盘110的表面125(例如,底表面)限定的一个或多个狭槽120。如本文所用,术语“狭槽”可指托盘表面中的任何开口、凹陷和/或任何其他接合特征部。由于托盘110可以由传送机系统105支撑在托盘110的侧面,因此可以从托盘110的任一侧触及底表面125和/或底表面125处的狭槽120。为了方便描述,这里参考底表面125和可从传送平面115下方触及的狭槽。
34.图2示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统100的透视图。如图2所示,基于托盘的自动化存储和取回系统100还可包括定位在托盘110下方(例如,与托盘的表面相邻)并在传送平面115下面的托盘定位器组件200。根据本公开的一个或多个实施方案,托盘定位器组件200可重新定位托盘110,以将它们定位在期望的拾取和/或放置位置。另外,托盘定位器组件200可将推动到一起的大尺寸的一组托盘110(例如,具有第一尺寸的第一组)分离成小尺寸的各组托盘110(例如,具有第二尺寸的第二组),以便减小由一个托盘尺寸和/或位置的变化而导致的差异,所述变化引起该组中所有托盘的位置差异。
35.如图2所示,第一组托盘110可以包括托盘110a-110i。托盘定位器组件200可以周期性间隔定位在传送平面115下方。在示例性实施方案中,托盘定位器组件200可以分开预定距离d,如图2所示。在一个实施方案中,预定距离d可基于托盘110的一个或多个尺寸来确定。例如,预定距离d可与托盘110的尺寸诸如宽度w的倍数成比例。例如,如果托盘110的宽度w是x个单位,则如果三个托盘的间隔是期望的,相邻托盘定位器组件200之间的预定距离d可以是3x。如图2所示,托盘定位器组件200可被定位在托盘110c和110g下方。
36.在示例性实施方案中,托盘定位器组件200可以与托盘110c和110g接合,如下文将描述的,以将托盘110c和110g从第一位置推动到第二(即期望的)位置。在一个实施方案中,当托盘110c和110g正在被托盘定位器组件200推动时,托盘110c和110g可以随后推动其他托盘。例如,托盘110c可以由托盘定位组件在第一方向205上推动,如图2所示。托盘110c可以推动相邻于110c的托盘110b,托盘110b可以进一步在第一方向205上推动托盘110a。类似
地,托盘定位组件可以在第二方向210上推动托盘110g,如图2所示。托盘110g可以推动相邻于110g的托盘110h,托盘110h可以进一步在第二方向210上推动托盘110i。因此,大尺寸的一组托盘110可以被分成第二组或一个或多个较小尺寸的组n1、n2、n3,如图2所示。因此,如上所述,托盘定位器组件200可以重新定位托盘110,以减小第一位置和第二位置之间的不对准程度。此外,托盘定位器组件200可以将托盘110从大尺寸组分离成一个或多个小尺寸组,如图2所示。
37.图3a示出了根据本公开的一个或多个实施方案的托盘定位器组件200的透视图。如上所述,托盘定位器组件200可以与定位在托盘定位器组件200上方的托盘110接合,以重新定位托盘110。如图3a所示,托盘定位器组件200可以包括一个或多个导销组件305。在示例性实施方案中,托盘定位器组件200可以包括第一导销组件305a和第二导销组件305b。导销组件305a、305b还可以包括用于与托盘110接合的一个或多个导销310。在如图3a所示的示例性实施方案中,第一导销组件305a可以包括第一导销310a,并且第二导销组件305b可以包括第二导销310b。第一导销组件305a和第二导销组件305b中的每一个还可包括轴承块307,该轴承块容纳以套筒形式定位到导销310的轴承308,如图3a所示。第一导销组件305a和第二导销组件305b还可包括安装支架309,该安装支架用于将第一导销组件305a和第二导销组件305b安装到托盘定位器组件200的安装板320。安装板320可以包括适于安装一个或多个导销组件305的板和/或任何其他结构。在示例性实施方案中,安装板320可以包括安装在安装板320第一端的第一导销组件305a和安装在安装板320第二端的第二导销组件305b。第一导销组件305a和第二导销组件305b之间的间距可以基于托盘110的两个狭槽之间的间距。
38.此外,托盘定位器组件200可以包括平移致动器315,该平移致动器可操作地联接到导销组件305,用于移动与托盘110接合的导销组件305,从而推动托盘110。在示例性实施方案中,具有第一导销组件305a和第二导销组件305b的安装板320可以活动联接到平移致动器315。平移致动器315可包括用于在联接到平移致动器315的安装板320中引起平移运动的任何装置。例如,平移致动器315可以包括联接到驱动组件330的带式致动器325,如图3a所示。安装板320可以联接到带式致动器325,并且带式致动器325可以由驱动组件330驱动以在第一方向327或与第一方向327相反的方向上移动。具体地,驱动组件330可以包括驱动器(未示出)诸如但不限于马达,从而驱动辊(未示出)。皮带340可由辊驱动,如图3a所示。带式致动器325可以联接到皮带340,使得当皮带340在第一方向327上被驱动时,带式致动器325以及随后安装板320在第一方向327上移动。在示例性实施方案中,平移致动器315可包括用于带式致动器325的受控运动的正时皮带(未示出)。因此,平移致动器315可以将导销组件305从起始位置(例如,托盘110的当前位置)移动到结束位置(例如,托盘110的期望位置),从而将托盘110从第一位置推动到第二位置。
39.图3b示出了根据本公开的一个或多个实施方案的导销组件305的剖视图。如上所述,导销组件305可包括用于接合托盘110的一个或多个导销310。在示例性实施方案中,导销310可以插入托盘110的底表面125处的狭槽120中或者由狭槽接收,如图1所示。此外,导销310可以垂直地往复运动,也就是说,可以延伸以插入托盘110的狭槽120中,并且可以回缩到初始位置(例如,不与狭槽120接合)。
40.如图3b所示,导销组件305还可包括容纳在轴承块307中的轴承308。轴承308可以
充当围绕导销310的套筒。此外,导销组件305可包括弹簧355和致动器360,如图3b所示。弹簧355和致动器360可以可操作地联接到导销310,使得导销310可以由致动器360致动,以便向外推动导销310并将其推动到托盘110的狭槽120中。导销310在被致动时可以抵靠弹簧355推动,该弹簧可以充当用于使导销310回缩到初始位置的回位弹簧。在示例性实施方案中,致动器360可包括短冲程气缸。
41.托盘定位器组件200还可以包括簧片开关345,如图3a所示,该簧片开关用于在由平移致动器315启动推动运动之前检测致动器360的位置。具体地,致动器360可以包括由磁性和/或含铁材料制成的磁性部分,使得簧片开关345可以基于该磁性部分来检测致动器360的向上和向下运动。因此,只有当簧片开关345检测到导销310完全延伸时,平移致动器315才可以被致动,以便防止导销310的损坏和/或断裂。此外,包括安装支架309和致动器360的导销组件305可以安装在安装板320上,如图3b所示。因此,为了重新定位托盘110,托盘定位器组件200可以控制致动器360以使导销310延伸以插入托盘110的狭槽120中,并且可以控制平移致动器315以将导销310从起始位置移动到结束位置,从而将托盘110从第一位置推动到第二位置。
42.图4示出了根据本公开的一个或多个实施方案的基于托盘的自动化存储和取回系统100的透视图。图4描绘了与位于传送机系统105上的托盘110接合的托盘定位器组件200。如图所示,托盘定位器组件200被定位在托盘110下方并且在传送平面115下面。如上所述,托盘定位器组件200的导销310可以插入托盘110的狭槽120中。此外,为了重新定位托盘110,托盘定位器组件200的平移致动器315可以在传送方向上和/或逆着传送方向将可操作地联接到平移致动器315并且插入到狭槽120中的导销310从起始位置移动到结束位置。
43.在示例性实施方案中,传送机系统105和/或托盘定位器组件200可以包括一个或多个传感器,诸如但不限于光眼、相机、接近传感器等。所述一个或多个传感器可检测一个或多个托盘110的至少一个位置。此外,如下文将描述的,基于托盘的自动化存储和取回系统100的控制器(例如,图5中的控制器500)可以从一个或多个传感器接收数据。控制器还可以通信地耦接到基于托盘的自动化存储和取回系统100的一个或多个部件,诸如但不限于传送机系统105、托盘定位器组件200等。
44.在示例性实施方案中,基于托盘的自动化存储和取回系统100和/或控制器可以基于触发事件控制托盘定位器组件200的致动。如本文所使用的术语“触发事件”可以指基于托盘的自动化存储和取回系统100的功能和/或操作的变化,该变化可以被基于托盘的自动化存储和取回系统100检测为用于致动托盘定位器组件200的触发。在一些实施方案中,触发事件可以包括由所述一个或多个传感器提供的托盘110定位在托盘定位器组件200上方的指示。例如,定位在托盘定位器组件200上方的传送机系统105上的光眼传感器可以检测托盘110在托盘定位器组件200上方的位置处的存在,并且可以向基于托盘的自动化存储和取回系统100和/或控制器(例如,图5中的控制器500)提供触发事件的指示。
45.在另一个实施方案中,触发事件可以包括由所述一个或多个传感器提供的在传送机系统105上接收多个托盘110的指示。例如,一个或多个传感器和/或控制器可以检测到托盘110的料块被接收在传送机系统105上。此外,基于料块中托盘110的数量、每个托盘110的尺寸(诸如宽度)和/或传送速度,基于托盘的自动化存储和取回系统100和/或控制器可以基于托盘110行进到托盘定位器组件200上方的位置所花费的时间来检测用于致动托盘定
位器组件200的触发事件。
46.此外,在另一个实施方案中,触发事件可包括由所述一个或多个传感器提供的托盘110与所确定的位置不对准的指示。例如,所述一个或多个传感器可以确定托盘110被不准确地定位在确定的拾取和/或放置位置处,并且可以向基于托盘的自动化存储和取回系统100和/或控制器提供不对准的指示。作为响应,基于托盘的自动化存储和取回系统100和/或控制器可以检测用于致动托盘定位器组件200的触发事件。此外,托盘定位器组件200和/或控制器可以基于托盘110与所确定的位置的不对准程度来确定导销310的起始位置和结束位置。
47.在示例性实施方案中,托盘定位器组件200可包括一个或多个传感器,诸如但不限于用于检测托盘110的狭槽120的接近传感器。例如,面朝上的光眼可以安装在托盘定位器组件200上靠近导销310处,使得如果光眼未被阻挡,则可确定存在狭槽120。因此,托盘定位器组件200可以确保在致动导销310之前狭槽120存在于导销310上方。
48.此外,如上所述,参考图3a,托盘定位器组件200可以包括两个导销310,所述两个导销将被插入到托盘110的两个对应的狭槽120中。因此,将托盘110推动到一起的两个导销310可以确保托盘110在移动时保持与传送机系统105对准,以便防止托盘110偏斜。
49.图5示出了根据本公开的一个或多个实施方案的用于控制基于托盘的自动化存储和取回系统100的操作的控制器500的示意性框图。如图所示,控制器500可以包括至少一个处理器520、存储器525、通信模块530和输入/输出模块535。处理器520可以配置有处理器可执行指令,以执行本文描述的操作。处理器520可例如实现为包括具有一个或多个伴随数字信号处理器的一个或多个微处理器、不具有伴随数字信号处理器的一个或多个处理器、一个或多个协处理器、一个或多个多核处理器、一个或多个控制器、处理电路、一个或多个计算机、各种其他处理元件(包括集成电路,诸如例如asic(专用集成电路)或fpga(现场可编程门阵列))、或它们的某种组合的各种装置。因此,尽管在图5中示出为单个处理器,但在一些实施方案中,处理器520可包括多个处理器。所述多个处理器可以在单个设备上实现,或者可以分布在多个设备上。所述多个处理器彼此可操作地通信,并且可被共同配置为执行如本文所述的控制器500的一个或多个功能。在示例性实施方案中,处理器520被配置为执行存储在存储器525中或可以其他方式供处理器520访问的指令。这些指令在被处理器520执行时可使控制器500执行控制器500的功能中的一种或多种,如参考图6所描述的。
50.存储器525可包括例如易失性存储器、非易失性存储器或它们的某种组合。尽管在图5中示出为单个存储器,但存储器525可包括多个存储器部件。所述多个存储器部件可以在单个设备上实现,或者分布在多个设备上。在各种实施方案中,存储器525可包括例如硬盘、随机存取存储器、高速缓存存储器、只读存储器(rom)、可擦除可编程只读存储器(eprom)和电可擦除可编程只读存储器(eeprom)、闪存存储器、磁带盒、磁带、磁盘存储装置或其他磁存储设备、光盘只读存储器(cd-rom)、数字通用光盘只读存储器(dvd-rom)、光盘、被配置为存储信息的电路、或它们的某种组合。存储器525可被配置为存储信息、数据(包括项目数据和/或简档数据)、应用程序、指令等,用于使控制器500能够根据本发明的示例性实施方案执行各种功能。例如,在至少一些实施方案中,存储器525可缓冲输入数据以供处理器520处理。附加地或另选地,在至少一些实施方案中,存储器525可存储程序指令以供处理器520执行。存储器525可存储静态和/或动态信息形式的信息。可由控制器500在执行其
功能的过程中存储和/或使用该存储的信息。
51.通信模块530可实现为任何这样的设备或装置,其实现在包括存储在计算机可读介质(例如,存储器525)上并由处理设备(例如,处理器520)执行的计算机可读程序指令的电路、硬件、计算机程序产品或它们的组合中,并且被配置为从/向另一个设备和/或网络(诸如传感器、传送机系统105、托盘定位器组件200等)接收和/或传输数据。在一些实施方案中,通信模块530(与本文所讨论的其他部件一样)可至少部分地实现为处理器520或以其他方式受该处理器的控制。就这一点而言,通信模块530可诸如经由总线来与处理器520通信。通信模块530可包括例如用于实现与另一个设备通信的天线、发射器、接收器、收发器、网络接口卡和/或支持硬件和/或固件/软件。通信模块530可被配置为使用任何可用于设备之间的通信的协议来接收和/或传输任何可由存储器525存储的数据。通信模块530可附加地或另选地诸如经由总线来与存储器525、输入/输出模块535和/或控制器500的任何其他部件通信。
52.输入/输出模块535可与处理器520通信以接收用户输入的指示和/或向用户提供听觉输出、视觉输出、机械输出或其他输出。因此,输入/输出模块535可包括例如对键盘、鼠标、操纵杆、显示器、触摸屏显示器、麦克风、扬声器、rfid读取器、条形码读取器、生物识别扫描仪和/或其他输入/输出机构的支持。与控制器500实现为终端用户机(例如,远程工作者设备和/或雇员设备)或其他类型的被设计用于复杂用户交互的设备的实施方案相比,在其中控制器500实现为服务器或数据库的实施方案中,可减少输入/输出模块535的方面。在一些实施方案(与本文所讨论的其他部件一样)中,可甚至从控制器500消除输入/输出模块535。另选地,诸如在控制器500实现为服务器或数据库的实施方案中,输入/输出模块535的至少一些方面可实现在用户所使用的与控制器500通信的装置上。输入/输出模块535可诸如经由总线来与存储器525、通信模块530和/或任何其他部件通信。一个或多于一个输入/输出模块和/或其他部件可包括在控制器500中。
53.如上所述且基于本公开应当理解,本发明的实施方案可被配置为方法、个人计算机、服务器、移动设备、后端网络设备等。因此,实施方案可包括各种装置,这些装置完全由硬件或者软件和硬件的任何组合形成。此外,实施方案可采取至少一个非暂态计算机可读存储介质上的计算机程序产品的形式,该计算机程序产品具有体现在存储介质中的计算机可读程序指令(例如,计算机软件)。可利用任何合适的计算机可读存储介质,包括非暂态硬盘、cd-rom、闪存存储器、光存储设备或磁存储设备。
54.已在上文参考方法、装置、系统和计算机程序产品的框图和流程图图示描述了本发明的实施方案。应当理解,电路图和过程流程图的每个方框以及电路图和过程流程图中的方框组合可分别由包括计算机程序指令的各种装置实现。可将这些计算机程序指令加载到通用计算机、专用计算机或其他可编程数据处理装置,诸如上文参考图5所讨论的处理器520,以产生机器,使得计算机程序产品包括在计算机或其他可编程数据处理装置上执行的指令,该计算机或其他可编程数据处理装置形成用于实现一个或多个流程图方框中指定的功能的装置。
55.还可将这些计算机程序指令存储在计算机可读存储设备(例如,存储器525)中,该计算机可读存储设备可指示计算机或其他可编程数据处理装置以特定方式工作,使得存储在计算机可读存储设备中的指令产生一种制品,该制品包括用于实现本文所讨论的功能的
计算机可读指令。还可将计算机程序指令加载到计算机或其他可编程数据处理装置上,以使得在计算机或其他可编程装置上执行一系列操作步骤,从而产生计算机实现的过程,使得在计算机或其他可编程装置上执行的指令提供用于实现本文所讨论的功能的步骤。
56.因此,框图和流程图图示的方框支持用于执行指定功能的装置的组合、用于执行指定功能的步骤的组合以及用于执行指定功能的程序指令装置。还应当理解,电路图和过程流程图的每个方框以及电路图和过程流程图中的方框组合可由执行指定功能或步骤的基于专用硬件的计算机系统或者专用硬件和计算机指令的组合来实现。
57.图6示出了根据本公开的一个或多个实施方案的用于操作基于托盘的自动化存储和取回系统100的示例性方法600。方法600可包括在框605处沿传送平面115传送多个托盘110,使得多个托盘110作为具有第一尺寸n的第一组定位在一起,如图1所示。如上所述,在一个实施方案中,托盘110可以在托盘110的表面125上包括一个或多个狭槽120。方法600还可包括在框610,由基于托盘的自动化存储和取回系统100和/或控制器500检测用于致动定位在与传送机系统105相邻的托盘定位器组件200的触发事件。如上所述,基于托盘的自动化存储和取回系统100和/或控制器可以基于触发事件来控制托盘定位器组件200的致动。如本文所使用的术语“触发事件”可指基于托盘的自动化存储和取回系统100的功能和/或操作的变化,其可以被基于托盘的自动化存储和取回系统100检测为用于致动托盘定位器组件200的触发。在一个实施方案中,触发事件可以包括由所述一个或多个传感器提供的托盘110与托盘定位器组件200相邻的指示。在另一个实施方案中,触发事件可以包括由所述一个或多个传感器提供的在传送机系统105上接收多个托盘110的指示。此外,在另一个实施方案中,触发事件可包括由所述一个或多个传感器提供的托盘110与所确定的位置不对准的指示。
58.此外,如果在框615处,基于托盘的自动化存储和取回系统100和/或控制器500确定未检测到触发事件,则方法600可以前进到框605。然而,如果在框615处基于托盘的自动化存储和取回系统100和/或控制器500检测到触发事件,则方法600可以前进到框620。
59.在框620处,方法600可以包括通过托盘定位器组件200和/或控制器500将托盘定位器组件200的一个或多个导销310与托盘110的一个或多个狭槽120接合,如图4所示。如上所述,参考图3b,导销组件305的致动器360可以致动导销310,以垂直向上延伸到托盘110的狭槽120中。因此,使托盘定位器组件200与托盘110接合。
60.方法600还可以包括在框625处,通过托盘定位器组件200和/或控制器500致动平移致动器320以移动至少一个托盘110,使得至少一个托盘110的平移可以将具有第二尺寸的第二组托盘沿着传送平面从第一组托盘分离到第二位置,以便减小与第一组托盘相关联的公差累积。如上所述,参考图3a和图4,托盘定位器组件200的平移致动器315可以使带式致动器325并且随后使具有导销310的安装板320朝向和/或远离托盘110的传送方向移动。由此,将较小尺寸的一组(即第二组)托盘与大尺寸的一组(即第一组)托盘分离,以便减小由多个托盘110被推动到一起所引起的差异(例如,减小公差累积)。
61.因此,基于托盘的自动化存储和取回系统100可以自动重新定位托盘110,以校正与期望的拾取和/或放置位置的任何不对准。基于托盘的自动化存储和取回系统100还可以将正在以大组尺寸推动的托盘110分成一个或多个小尺寸组,以减小公差累积。
62.必须注意,如在本说明书和所附权利要求中所使用的,单数形式“一”、“一个”和“该”包括复数指示物,除非内容另有明确说明。
63.在本说明书中对“一个实施方案”、“实施方案”、“多个实施方案”或“一个或多个实施方案”的引用意在指示结合该实施方案描述的特定特征、结构或特性包括在本公开的至少一个实施方案中。此类短语在说明书中的各个地方的出现不一定都指代相同的实施方案,也不是与其他实施方案互斥的单独或另选实施方案。此外,描述了可以由一些实施方案而不是由其他实施方案呈现的各种特征。类似地,描述了各种要求,这些要求可能是一些实施方案的要求而不是其他实施方案的要求。
64.应当指出的是,当在本公开中采用时,术语“包含”、“包括”和来自根术语“包含”的其他衍生词旨在是开放式术语,其指定存在任何所述特征、元素、整数、步骤或部件,并且不旨在排除一个或多个其他特征、元素、整数、步骤、部件或其组的存在或添加。
65.根据需要,本文公开了本发明的详细实施方案;然而,应当理解,本公开的实施方案仅仅是本发明的示例性实施方案,其可以各种形式体现。因此,本文所公开的具体结构和功能细节不应解释为是限制性的,而仅仅是作为权利要求的基础,并且是教导本领域技术人员以实质上任何适当的详细结构不同地采用本发明的代表性基础。
66.虽然显而易见的是,本文所公开的本发明的例示性实施方案实现了上述目标,但应当理解,本领域的普通技术人员可设计出许多修改形式和其他实施方案。因此,应当理解,所附权利要求旨在涵盖属于本发明的实质和范围内的所有此类修改形式和实施方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。