1.本发明涉及一种用于确定车辆的环境传感器的额定位置的方法。本发明此外涉及一种用于确定车辆的环境传感器的额定位置的设备。
背景技术:
2.现代车辆通常拥有大量驾驶员辅助系统,所述驾驶员辅助系统具有用于监控车辆的环境的环境传感器。这种系统例如在停车时、在变换车道时进行辅助或实现如acc(自适应巡航控制(adaptive cruise control))功能、轮辙保持功能、紧急制动功能等的其他功能。然而,对于系统的安全和正确的作用方式需要由环境传感器提供的数据表示真实情况的尽可能精确的映像。
3.为了保证这一点,环境传感器通常在其在车辆中的安装位置和其安装定向(取向)方面被校准。如果环境传感器此外是测量相对速度的传感器,诸如雷达或超声波传感器,则由传感器测量的相对速度也提前被校准。就此而论,术语“校准”意味着将实际的实际安装位置、实际安装定向和实际相对速度分配给期望的或假定的额定安装位置、额定定向和额定相对速度。校准确保:由环境传感器提供的数据、诸如间距、定向/位姿(lage)以及必要时对象的相对速度与真正的情况相对应。通常在交付车辆之前借助于外部校准对象执行这种校准。
4.然而已经表明,在车辆的使用寿命的过程中,可能由于各种影响而发生环境传感器的去校准(dekalibrierung)。这种去校准导致由环境传感器提供的数据不再反映实际的真实情况。换句话说,环境传感器例如提供距对象10 cm的距离,尽管所述距离实际上仅8 cm。由环境传感器提供的数据和实际上存在的数据或情况之间的这种不均衡可能例如由于环境传感器的沉降行为(setzverhalten)、由于车辆的事故(车身的损坏/变形)或也由于周围环境影响、例如石击等而出现。去校准不仅可能导致驾驶员辅助系统不再以必要的精度工作。在最坏的情况下,去校准甚至可能对于车辆乘员是增加的风险。
技术实现要素:
5.因此本发明的任务是实现一种可能性,利用所述可能性,可以以简单且成本低的方式更新或跟踪(nachf
ü
hren)环境传感器的曾经进行的校准。
6.该任务通过根据专利权利要求1的方法或根据专利权利要求15的设备来解决。本发明的有利设计方案是从属权利要求的主题。
7.根据本发明的第一方面,实现一种用于借助于用作校准对象的车辆侧附装元件确定车辆的环境传感器的额定位置或额定安装位置的方法,其中所述环境传感器和所述车辆侧附装元件能够彼此相对移动。所述方法包括以下步骤:在所述环境传感器和所述车辆侧附装元件之间的第一相对位姿中确定所述环境传感器的第一实际位置或第一实际安装位置,使所述环境传感器和/或所述车辆侧附装元件从所述第一相对位姿移动到所述环境传感器和所述车辆侧附装元件之间的第二相对位姿,在所述第二相对位姿的情况下确定所述
环境传感器的第二实际位置或第二实际安装位置,以及通过将所述第一实际位置和所述第二实际位置求平均成平均实际位置并且将所述平均实际位置分配为额定位置来确定所述环境传感器的额定位置或额定安装位置。
8.根据第一方面的方法所基于的认识尤其是在于:环境传感器的实际的安装位置或实际安装位置在车辆的使用寿命的过程中例如由于环境传感器的沉降行为、由于车辆的事故或也由于周围环境影响、例如石击和在一些情况下随之出现的车身变形而与最初的(在工厂方设定的)额定安装位置偏离。由于在环境传感器的实际安装位置或实际位置与环境传感器的额定安装位置或额定位置之间的偏差,可能发生传感器数据的去校准,其结果是,由环境传感器提供的数据不准确或有差错。本发明的思想在于在无附加的外部校准对象的情况下重新校准曾经被去校准的环境传感器,或者相应地跟踪曾经设定的校准。因此,提出使用车辆侧附装元件作为校准对象,使得不再需要外部校准对象。此外,本发明基于以下认识:通过环境传感器与车侧附装元件之间的相对运动可以获取车辆侧附装元件与环境传感器之间的多个相对位姿,然后能够对于所述相对位姿分别确定各自的实际位置,随后通过求平均将所述实际位置转化成平均实际位置并且然后将该平均实际位置用作环境传感器的额定位置或额定安装位置。
9.在本公开的范围内,术语“求平均”通常意味着从给定的值中构成另一值。术语“求平均”因此不仅指的是对实际位置进行算术、几何、二次或加权平均,而且指的是对所确定的实际位置应用其他计算准则,诸如数学过滤函数、回归等。
10.因为在根据本发明的方法中由于在车辆侧附装元件和环境传感器之间的移动而可以考虑环境传感器的多个实际位置,并且此外使用车辆侧附装元件(而不使用车辆外部对象)作为校准对象,所以实现一种简单且成本低的可能性:在车辆的使用寿命期间可靠地跟踪或更新对环境传感器在其额定位置或额定安装位置方面的曾经进行的校准。
11.在根据本发明的方法的一种优选设计方案中,该方法此外用于确定环境传感器的额定定向或额定安装定向。与本公开相结合地,术语“定向”可以被理解为环境传感器的传感器平面相对于坐标系的参考平面的取向或角位置。环境传感器的定向是重要的,以便不仅能够正确地确定位置而且能够正确地确定环境主体相对于环境传感器的角位置。由于在车辆的使用寿命的过程中也可能发生在环境传感器的额定安装方向方面的去校准,因此根据本发明的方法在该优选设计方案中包括以下附加步骤:在第一相对位姿的情况下确定环境传感器的实际定向或实际安装定向,在第二相对位姿的情况下、也即在环境传感器和/或车辆侧附装元件已经彼此相对移动之后存在的相对位姿的情况下,确定确定环境传感器的第二实际定向或第二实际安装定向,并且最后通过将第一实际定向和第二实际定向求平均成平均实际定向并且将平均实际定向分配为额定定向来确定环境传感器的额定定向或额定安装定向。通过这些附加步骤可能的是,例如也在环境传感器的传感器平面的角位置方面重新校准沉降行为,使得将环境传感器的实际的实际安装定向分配为环境传感器的额定安装定向。
12.按照根据本发明的方法的另一优选设计方案,该方法此外用于确定由环境传感器要确定的额定相对速度。这种设计方案特别是用于以下环境传感器,即所述环境传感器除了环境对象的位置和定向之外,此外可以确定车辆(或传感器)与环境对象之间的相对速度。这种环境传感器例如是雷达传感器、超声波传感器或本领域技术人员已知的其他传感
器。由于这种传感器也可能在确定相对速度方面被去校准,因此在根据本发明的方法的该优选设计方案中提出:给所述方法补充现在以下步骤:在所述第一相对位姿的情况下确定所述环境传感器和所述车辆侧附装元件之间的第一实际相对速度,在所述第二相对位姿的情况下确定所述环境传感器和所述车辆侧附装元件之间的第二实际相对速度,以及通过将所述第一实际相对速度和所述第二实际相对速度求平均成平均实际相对速度并且将所述平均实际相对速度分配为额定相对速度来确定所述额定相对速度。
13.通过根据本发明的方法的该优选设计方案,因此除了已经提到的对环境传感器的额定位置和额定定向的校准之外,还可以校准由环境传感器要确定的额定相对速度。由于可以再次外部校准对象,并且代替地车辆侧附装元件用作校准对象,因此在该优选设计方案中也可以在车辆的使用寿命期间简单且成本低地(重新)校准现代环境传感器、例如雷达或超声波传感器。
14.在根据本发明的方法的另一设计方案中,使所述环境传感器和/或所述车辆侧附装元件从所述第一相对位姿移动到所述第二相对位姿仅包括使所述车辆侧附装元件相对于所述环境传感器移动。换句话说,在该设计方案中,仅使车辆侧附装元件相对于环境传感器移动,而不使环境传感器相对于车辆侧附装元件移动。这具有以下优点:(不移动的)环境传感器在环境传感器和车辆侧附装元件之间的各种相对位姿的情况下总是具有相同的视野。由于仅校准对象、即车辆侧附装元件在环境传感器的固定视野中移动,所以在确定额定位置、额定定向和额定相对速度时出现较少的干扰影响。此外,与在各自相对位姿中改变的视野相比,这种类型的(重新)校准需要较低的计算能力。
15.如果车辆侧附装元件例如是车辆的以电动方式可调整的镜、尤其是侧镜,则优选地通过以电动方式调整镜来使车辆侧附装元件移动。在此思想是,在现代车辆中,尤其是侧镜通常原本是以电动方式可调整的。于是可以使用镜的电动调整用于使车辆侧附装元件相对于环境传感器移动,使得可以简单且快速地确定环境传感器的额定位置、额定定向和额定相对速度。镜的电动调整此外具有以下优点:对于镜和环境传感器之间的每个相对位姿,镜的位置、定向/角位置和速度是已知的,并且由此用于在环境传感器的安装位置、安装定向和由所述环境传感器要确定的相对速度方面校准所述环境传感器的固定的或预定的参考数据是可能的。在本公开的范围中,术语“镜”此外不表示反射表面,而是相反地表示车辆的可移动附装元件。就此而言,镜像表面现在是玻璃表面还是摄像机是无关紧要的。就此而言,术语镜的“电动”调整也可以指的是借助于压电电机系统(piezomotorik)调整镜。可替代地,可设想的是,代替镜的电动调整,手动地调整镜并且借助于相应的传感器检测其时间变化过程。
16.在根据本发明的方法的另一设计方案中,使所述环境传感器和/或所述车辆侧附装元件从所述第一相对位姿移动到所述第二相对位姿的步骤仅包括使所述环境传感器相对于所述车辆侧附装元件移动。换句话说,在这种设计方案中,仅使环境传感器相对于车辆侧附接元件移动,而不使车辆侧附接元件相对于环境传感器移动。虽然这具有以下缺点,即由于环境传感器的移动,环境传感器的视野在环境传感器和车辆侧附接元件之间的各自相对位姿中发生变化。然而,可以使用每个适宜的车辆侧附接元件来校准环境传感器。除了已经谈及的镜之外,车辆的其他显著特征、诸如门把手、a柱、b柱、c柱、头枕、后视镜等也属于此,因此车辆的所有位于内部或位于外部的附接元件属于此,所述附接元件表示环境传感
器的视野中的显著点。
17.如果如通常而言情况那样环境传感器此外安置在以电动方式可调整的盖处、诸如安置在车辆的后盖处、安置在车门处或安置在油箱盖处,则可以优选地通过以电动方式调整盖使环境传感器相对于车辆侧附接元件移动。由于在现代车辆中,盖、诸如后盖、车门等通常原本是以电动方式可调整的,所以可以使用这种电动调整用于使环境传感器相对于车辆侧附接元件移动,使得可以再次简单且快速地完成对环境传感器的额定位置、额定定向和额定相对速度的确定。盖的“电动”调整不仅可以被理解为盖的主动电动调整,而且可以被理解为以电动方式抵抗盖的手动移动的盖制动/减速。
18.在该特别优选的设计方式中也利用以下事实:由于盖的电动调整,在环境传感器和车辆侧附接元件之间的每个相对位姿中环境传感器相对于车辆侧附接元件的速度和定向/角位置、位置都是已知的,并且由此用于在环境传感器的安装位置、安装定向和由所述环境传感器要确定的相对速度方面校准环境传感器的固定的或预定的参考数据是可能的。
19.也可设想的是,(例如,借助于为此专门设立的导向装置)使环境传感器沿着附加的预定校准轨迹移动。
20.在根据本发明的方法的另一设计方案中,使所述环境传感器和/或所述车辆侧附装元件从所述第一相对位姿移动到所述第二相对位姿的步骤包括使环境传感器以及所述附装元件移动。换句话说,在该设计方案中,不仅使环境传感器移动而且使附接元件移动。由于环境传感器和附接元件的移动,可以执行环境传感器的更高的精度或更精确的校准。
21.在根据本发明的方法的另一设计方案中,使用位于所述车辆的环境中的另一校准对象来确定额定位置或额定定向或额定相对速度。例如,该校准对象可以是地面、路名牌、车道划线或车辆的可以用作校准对象的其他显著环境对象。尤其是,该车辆外部的其他校准对象也可以是前方行驶的或后方行驶的车辆的显著点。借助于现在也可以存在于车辆外部的附加的校准对象,例如也通过环境传感器和附加校准对象之间的可能的动态相对运动,可以进一步提高校准的精度。
22.在根据本发明的方法的另一设计方案中,环境传感器是第一环境传感器并且车辆具有至少一个其他第二环境传感器,其中借助于第一环境传感器的额定位置确定至少一个其他(第二)环境传感器的额定位置。
23.在另一设计方案中,此外借助于第一环境传感器的额定定向来确定至少一个其他(第二)环境传感器的额定定向。
24.在另一设计方案中,此外借助于第一环境传感器的额定相对速度来确定至少一个其他(第二)环境传感器的额定相对速度。
25.由此可以借助于(第一)环境传感器的额定位置、额定定向和额定相对速度来确定车辆的其他环境传感器的额定位置、额定定向以及额定相对速度。换句话说可能的是,可以彼此校准多个环境传感器。
26.在另一设计方案中,环境传感器是雷达传感器,并且可以借助于合成孔径来确定环境传感器的第一实际位置和/或第二实际位置。这种方法基于以下思想,即由环境传感器的所接收的雷达回波的强度和相位角值合成环境传感器的大天线的孔径(apertur)。由此,可以实现用于确定第一和/或第二实际位置的更高空间分辨率。
27.根据本发明的第二方面,实现一种用于借助于用作校准对象的车辆侧附装元件确
定车辆的环境传感器的额定位置的设备,其中所述环境传感器和所述车辆侧附装元件能够相对彼此移动。根据第二方面的设备尤其是具有用于执行根据第一方面或其设计方案所述的方法的计算单元。由此实现一种设备,利用所述设备可以即使在车辆的使用寿命期间也更新或跟踪曾经设定的校准。
28.在根据本发明的设备的一种设计方案中,该设备此外具有环境传感器和车辆侧附接元件。
29.只要该方法的有利设计方案可以应用于设备,所述设计方案也可以被视为设备的有利设计方案。
附图说明
30.通过实施本教导并且考虑所附附图,本发明的其他特征和任务对于本领域技术人员变得显而易见。其中:图1示出具有根据本发明的设备的一种实施方式的车辆的俯视图,图2示出车辆的侧图用于更好地阐明本教导,图3示出具有根据本发明的设备的另一实施方式的车辆的另一俯视图,图4示出具有根据本发明的设备的另一实施方式的车辆的另一俯视图,图5示出具有根据本发明的设备的另一实施方式的车辆的另一俯视图,图6示出根据本发明的方法的一种实施方式的流程图的示意图,以及图7示出根据本发明的方法的另一实施方式的流程图的示意图。
具体实施方式
31.相同构造或功能的元件跨越图地配备有相同的附图标记。
32.首先应该参照图1,所述图1示出用于确定车辆14的环境传感器12的额定位置、额定定向和额定相对速度的设备10。为此,设备10除了环境传感器12之外还具有用作校准对象的车辆侧附装元件16,所述附装元件16在图1的具体示例中是车辆14的以电动方式(motorisch)可调整的镜、尤其是侧镜。设备10此外具有计算单元18,所述计算单元18根据运行(betriebsm
äß
ig)与车辆侧附装元件或侧镜16和环境传感器12连接。环境传感器12例如是雷达传感器或超声波传感器。
33.如在图1中可看出的,可以使以电动方式可调整的侧镜16在第一位置20和第二位置22之间移动。通过移动侧镜16,得出侧镜16和环境传感器12之间的第一相对位姿,所述相对位姿由侧镜16的第一位置20相对于环境传感器12的位置定义,以及得出侧镜16和环境传感器12之间的第二相对位姿,所述第二相对位姿由侧镜16的第二位置22相对于环境传感器12的位置定义。位置20、22以及环境传感器的位置在x、y和z坐标中借助于在图1中具有附图标记24的笛卡尔坐标系来说明,所述环境传感器的位置例如可以是环境传感器12的安装位置。
34.从而,侧镜16例如在第一位置具有笛卡尔坐标x0、y0、z0,而在第二位置22具有笛卡尔坐标x1、y1和z1。在此,笛卡尔坐标系的x轴表示关于车辆14的前后方向,笛卡尔坐标系的z轴表示关于车辆14的上下方向,并且y轴表示垂直于x轴并且垂直于z轴且远离车辆指向的方向。
35.坐标系不必须是笛卡尔坐标系,而是相反地可以任意地被选择。在图1中所示的坐标系24仅用于阐明本教导。
36.由于在图1的具体示例中侧镜16在xy平面中移动,所以位置22中的z坐标具有与位置20中的z坐标相同的值。这也仅仅是示范性的而不应被解释为限制性的。
37.如此外在图1中所示的,侧镜16在第一位置20具有速度v0,而侧镜在第二位置22具有速度v1。与此相对地,环境传感器12具有在工厂方曾经设定的安装位置,所述安装位置由笛卡尔坐标xsens、ysens和zsens定义。此外,环境传感器12的传感器平面在xy平面中具有角度alphasens。如在图2中为了进一步阐明所表明的,环境传感器12的传感器平面此外在xz平面中具有角度betasens。环境传感器12此外可以确定相对于环境对象、诸如侧镜16的相对速度。这通常在图1中由标记vsens表明。
38.环境传感器12不仅可以确定位置(示范性地由x、y、z坐标给出)以及侧镜16相对于环境传感器12的传感器平面的空间位姿或定向(示范性地由相对于xy和xz平面的角度给出),而且也可以确定侧镜16和环境传感器12之间的相对速度,并且在侧镜16和环境传感器12之间的每个相对位姿、也即在每个位置20和22如此做(das)。
39.换句话说,环境传感器12例如在侧镜16的第一位置20确定坐标x0、y0和z0以及侧镜16相对于xy或xz平面(为了更好地清楚性未示出)的角度以及侧镜16和环境传感器12之间的相对速度v0。在侧镜16的第二位置22,环境传感器12确定例如坐标x1、y1和z1,侧镜16相对于xy或xz平面(为了更好的清楚性未示出)的角度以及侧镜16和环境传感器12之间的相对速度v1。
40.对于侧镜16和环境传感器12之间的这些相对位姿中的每一个(即对于每个位置20、22),环境传感器12因此提供数据组,所述数据组描述侧镜16相对于环境传感器12的位姿/定向和位置以及侧镜16和环境传感器12之间的相对速度。因为侧镜16由于以电动方式调整而沿预先给定的轨迹移动,并且因此在移动的每个时间点不仅速度而且位姿/定向以及侧镜16相对于环境传感器12的位置都是已知的,所以计算单元18可以基于由环境传感器12提供的数据组针对位置20、22中的每一个确定环境传感器12的实际的位置或定向、即实际位置和实际定向以及侧镜16和环境传感器12之间的实际的相对速度、即实际相对速度。随后,计算单元18将所获得的实际位置求平均成平均实际位置,计算单元18将所获得的实际定向求平均成平均实际定向,并且计算单元18将所获得的实际相对速度求平均成平均实际相对速度。平均实际位置最终作为实际的位置或作为环境传感器12的额定位置(以坐标xsens、ysens和zsens的形式)被分配或存储。类似地,平均实际定向作为实际的定向或环境传感器12的额定定向(以角度alphasens、betasens的形式)被分配或存储。类似地,平均实际相对速度作为额定相对速度(以vsens的形式)被分配或存储。
41.因为环境传感器12的实际的安装位置被分配为额定安装位置,所以以这种方式,环境传感器12的例如在工厂方曾经存储的安装位置被更新或跟踪。类似地,因为环境传感器12的实际的安装定向被分配为额定安装定向,所以环境传感器12的例如在工厂方曾经存储的安装定向被更新或跟踪。类似地,例如在工厂方曾经存储的和由环境传感器12要确定的相对速度被更新或跟踪,其方式是由环境传感器12确定的实际的相对速度被分配为额定相对速度。更新提高由环境传感器12提供的数据的精度,并且改善环境传感器12的可靠性或与环境传感器12连接的驾驶员辅助系统的可靠性。
42.现在应该参照图3,所述图3示出用于确定环境传感器12的额定位置、额定定向和额定相对速度的另一设备10。然而,与图1的设备10相比,在图3的设备10中,不使车辆侧附装元件移动,而是使环境传感器12移动。如对于大多数现代车辆而言的情况那样,环境传感器12布置在车辆14的盖(klappe)24处。在图3的具体示例中,盖24是车辆14的侧门。在未示出的其他实施方式中,盖24也可以是车辆14的后盖、油箱盖或其他可移动盖。
43.盖或侧门24此外是以电动方式可调整的。通过以电动方式调整盖24,环境传感器12可以沿着预先给定的轨迹移动。通过移动侧门24,又得出环境传感器12和车辆侧附装元件之间的相对位姿的变化。因此,图3中的环境传感器12示范性地在两个位置26、28示出。在第一位置26,盖或侧门24显示处于关闭状态并且环境传感器12具有坐标xsensl、ysensl、zsensl以及速度vsensl。在第二位置28,盖或侧门24处于打开状态并且环境传感器12具有坐标xsens2、ysens2、zsens2以及速度vsens2。
44.图3中的设备10与图1中的设备10的另一区别在于,车辆侧附装元件不是(如图1中所示的)侧镜,而是用附图标记30表示的车辆14的a柱。从而,在图3的具体示例中a柱30被用作用于环境传感器12的校准对象。
45.环境传感器12现在可以对于位置26、28中的每一个或对于环境传感器12和a柱30之间的每个相对位姿提供数据组,所述数据组描述a柱30相对于环境传感器12的位姿/定向和位置以及a柱30和环境传感器12之间的相对速度。因为盖24以及从而环境传感器12由于以电动方式调整盖24而沿着预先给定的轨迹移动并且因此在移动的每个时间点,不仅速度而且位姿/定向以及环境传感器12相对于a柱30的位置是已知的,所以计算单元18可以基于由环境传感器12提供的数据组针对位置26、28中的每一个或针对相对位姿中的每一个确定环境传感器12的实际的位置或定向、即实际位置和实际定向以及a柱30和环境传感器12之间的实际的相对速度、即实际相对速度。
46.类似于已经结合图1描述的操作方式,计算单元18随后将所获得的实际位置求平均成平均实际位置或者计算单元18将所获得的实际定向求平均成平均实际定向或者计算单元18将所获得的实际相对速度求平均成平均实际相对速度,并且将平均实际位置存储为环境传感器12的实际的位置或额定位置(以xsens、ysens、zsens的形式)或将平均实际定向存储为环境传感器12的实际的定向或额定定向(以角度alphasens、betasens的形式)或将环境传感器12和a柱30之间的平均实际相对速度存储为额定相对速度(以vsens的形式)。
47.环境传感器12相对于车辆侧附装元件或相对于a柱30移动的优点尤其是在于,现在也可以使用不可移动的车辆侧附装元件作为校准对象。因此,例如也可设想的是,代替a柱30可以使用后视镜、b柱、c柱、头枕或其他适宜的位于内部或也位于外部的车辆侧附装元件作为校准对象。
48.现在应该参照图4,所述图4示出用于确定环境传感器12的额定位置、额定定向和额定相对速度的另一设备10。与图1的设备10相比并且与图3的设备10相比,在图4的设备10中,不仅使在图4的具体示例中安置在以电动方式可调整的盖32或后侧门上的环境传感器12移动而且使在图4的具体示例中是盖或前侧门24的内部门把手34的车辆侧附装元件移动。
49.为了更好的总览,在图4的具体示例中仅在单个位置示出后侧门32或环境传感器12(由坐标xsens、ysens、zsens和速度vsens表示)并且也仅在单个位置示出车辆侧附装元
件或内部门把手34(由坐标xat、yat、zat和速度vat表示)。
50.通过可以以电动方式调整后侧门32以及前侧门24,并且通过由此可以使环境传感器12以及车辆侧附装元件或内部门把手34沿着分别预先给定的轨迹移动,对于环境传感器12和车辆侧附装元件34之间的每个相对位姿,环境传感器12和车辆侧附装元件34之间的相对速度以及车辆侧附装元件34相对于环境传感器12的位置和位姿/定向是已知的。因此,计算单元18又可以基于由环境传感器12提供的数据组针对车辆侧附装元件34和环境传感器12之间的每个相对位姿确定环境传感器12的实际的位置或定向、即实际位置和实际定向以及车辆侧附装元件34和环境传感器12之间的实际的相对速度、即实际相对速度。计算单元18随后又将所获得的实际位置求平均成平均实际位置,或者计算单元18将所获得的实际定向求平均成平均实际定向,或者计算单元18将所获得的实际相对速度求平均成平均实际相对速度,并且计算单元18将平均实际位置分配为环境传感器12的额定位置或将平均实际定向分配为环境传感器12的额定定向或将环境传感器12和车辆侧附装元件34之间的平均实际相对速度分配为额定相对速度。
51.环境传感器12和车辆侧附装元件34的移动的优点尤其是在于,在使环境传感器12和车辆侧附装元件34移动时可以产生更多的并且更不同的相对位姿并且由此在确定额定位置或额定定向或额定相对速度时可以实现更高的精度。
52.现在应该参照图5,所述图5示出用于确定环境传感器12的额定位置、额定定向和额定相对速度的另一设备10。与迄今为止描述的设备相比,在图5的设备10中,除了车辆侧附装元件(a柱30)之外还使用位于车辆14的环境中的另一校准对象36用于确定环境传感器12的额定位置、额定定向或额定相对速度。在图5的具体示例中,另一或附加的校准对象36是前方行驶的车辆38的显著点(markante stelle),该显著点例如可以是前方行驶的车辆38的牌照。然而在未示出的其他实施方式中,附加的校准对象36也可以是地面、路名牌、车道划线或车辆14的其他显著环境对象。
53.因为校准对象36可以被用作用于确定环境传感器12的额定位置、额定定向和额定相对速度的附加参考对象,所以借助于附加的校准对象36可以进一步提高校准的精度。如果如在图5的具体示例中那样,附加的校准对象36例如是前方行驶的车辆38的显著点,则可以例如借助于车辆14的另一环境传感器40确定位置(由坐标xk、yk、zk说明)以及在附加的校准对象36和该另一环境传感器40之间的相对速度(由vk说明)并且可以借助于计算单元18除了由环境传感器12获取的数据组之外使用由另一环境传感器40获取的数据组来确定环境传感器12的额定位置、额定定向和额定相对速度。环境传感器40也可以是车辆14的上级计算和接收单元,所述上级计算和接收单元可以与环境传感器12双向地交换数据。
54.但是也可能的是,另一环境传感器40借助于环境传感器12的已经确定的额定位置、额定定向和额定相对速度在其自身的额定位置、额定定向和额定相对速度方面被校准。为此,计算单元18可以例如考虑环境传感器12、40的相对位置、环境传感器12、40的相对定向和以及由环境传感器12、40分别确定的相对速度。
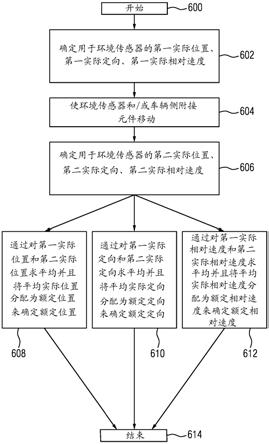
55.现在应该参照图6,所述图6示出根据本发明的用于确定环境传感器的额定位置、额定定向或额定相对速度的方法的流程图的示意图。
56.该方法在步骤600处开始。
57.随后接着是步骤602,其中例如借助于计算单元18确定用于环境传感器、例如环境
传感器12的第一实际位置、第一实际定向和第一实际相对速度。
58.在下一步骤604中,现在使环境传感器12和/或车辆侧附装元件移动。根据设计方案,为此如例如结合图1已经描述的那样,可以使车辆侧附装元件(侧镜)16相对于环境传感器12移动。然而,如结合图3已经描述的那样,也可以使环境传感器12相对于车辆侧附装元件(a柱30)移动。也可设想的是,如结合图4已经提及的那样,使环境传感器12以及车辆侧附装元件(内部门把手)34移动。通过使环境传感器12和/或车辆侧附装元件移动,存在于环境传感器12和车辆侧附装元件之间的第一相对位姿变为第二相对位姿。
59.在紧接着的步骤606中,现在在车辆侧附装元件和环境传感器12之间的第二相对位姿中例如借助于计算单元18确定用于环境传感器12的第二实际位置、第二实际定向和第二实际相对速度。
60.在下一步骤608中,(例如再次借助于计算单元18)将第一实际位置和第二实际位置求平均成平均实际位置并且将该平均实际位置最后分配给环境传感器12的额定位置。
61.类似地,在步骤610中,将第一实际定向和第二实际定向求平均成平均实际定向并且将该平均实际定向最后分配给环境传感器12的额定定向。
62.类似地,在步骤612中,将第一实际相对速度和第二实际相对速度求平均成平均实际相对速度,并且将该平均实际相对速度最后分配给额定相对速度。
63.最后,该方法在步骤614处结束。
64.最后,还应该参照图7,该图7示出图6的方法的变型方案。
65.正如与图6的方法一样地,图7的方法具有步骤600至612。然而,在该方法的该变型方案情况下,在附加的步骤700中,借助于用于环境传感器12的已经确定的额定位置来确定另一环境传感器(例如图5的环境传感器40)的额定位置。类似地,在附加步骤702中,利用环境传感器12的已经确定的额定定向来确定另一环境传感器(例如环境传感器40)的额定定向。类似地,在附加的步骤704中,利用环境传感器12的已经确定的额定相对速度来确定另一环境传感器(例如环境传感器40)的额定相对速度。
66.最后,方法在步骤706处结束。
67.利用结合图1至图5描述的设备以及利用结合图6和图7描述的方法可能的是,用于车辆的环境传感器的曾经设定的校准可以被更新或跟踪,而不必使用外部校准对象。由于可以使环境传感器和用作校准对象的车辆侧附装元件彼此相对地移动的事实,因此可能的是,针对环境传感器和车辆侧附装元件之间的不同相对位姿获取不同的数据组,并且从而获得对用于车辆的环境传感器的额定位置或额定定向或额定相对速度的可靠和安全的确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。