1.本发明涉及无人机技术领域,具体涉及一种消防灭火用远程遥控越障无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,无人机在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途。
3.现有的用于消防灭火的无人机在升降以及飞行转弯的时候,由于其内部水箱的存在,惯性会导致水箱在无人机机身内移动,撞击无人机基体内部的元件,导致其损坏或者连接脱落无法正常使用,因此,我们提出一种消防灭火用远程遥控越障无人机。
技术实现要素:
4.本发明的目的在于提供一种消防灭火用远程遥控越障无人机,通过缓冲组件以及弹性橡胶顶块的设计,能对水箱在无人机升降以及飞行转弯时产生的惯性进行缓冲,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种消防灭火用远程遥控越障无人机,包括无人机本体,所述无人机本体包括前端控制组件、机身水箱放置组件以及后端驱动组件,所述无人机本体机身的下表面通过铰接组件铰接有升降轮;
7.所述前端控制组件包括与机身水箱放置组件相连接的球形防护罩,所述球形防护罩的内部分别安装有plc控制器、无线信号收发器和用于无人机本体机械组件的驱动控制器,所述无线信号收发器与驱动控制器分别通过连接线与plc控制器电性连接;
8.所述机身水箱放置组件包括机身外壳、水箱、水箱放置组件和缓冲组件,所述机身外壳的内底部开设有凹槽,所述水箱放置组件安装于凹槽的内部,所述缓冲组件安装于机身外壳的内部,且所述缓冲组件的一端与水箱放置组件相连接;
9.所述后端驱动组件包括喷气式发动机以及用于控制喷气式发动机启停的发动机控制器。
10.优选的,所述水箱放置组件包括导轨、滑块和支撑板,所述导轨安装于凹槽的内部,所述滑块滑动安装于导轨上,所述支撑板安装于导轨上表面。
11.优选的,所述机身外壳的内部对称设置有两组挡板,两组所述挡板上均设置有弹性橡胶顶块,所述弹性橡胶顶块的一端均抵触于水箱的外壁上,所述缓冲组件安装于挡板的侧壁上。
12.优选的,所述缓冲组件包括内杆、套管和压缩弹簧,所述内杆滑动插接于套管的内部,所述内杆位于套管内部的一端固定有限位块,所述压缩弹簧设置于套管的内部,所述压
缩弹簧的两端分别抵触于限位块的侧壁上以及套管的内底部。
13.优选的,所述水箱的内部对称设置有两组倾斜导流板,所述倾斜导流板的最低端连通有出水管,所述出水管的一端设置有波纹管,所述波纹管下端连通有输送管,所述输送管上安装有电磁阀,且所述输送管的一端连通有喷水管,所述喷水管的下端呈线性等间距设置有喷头。
14.优选的,所述前端控制组件还包括摄像头以及用于对摄像头防护的半球形透明罩体,所述半球形透明罩体安装于球形防护罩的上,所述括摄像头的拍摄端贯穿球形防护罩位于半球形透明罩体的内部。
15.优选的,所述铰接组件包括凹形块、旋转阻尼器、插接柱和升降轮安装杆,所述旋转阻尼器安装于凹形块的内壁上,所述插接柱插接于旋转阻尼器的内圈,所述升降轮安装杆固定于插接柱的一端。
16.优选的,所述凹形块的一侧安装有驱动马达,凹形块的侧壁上开设有通孔,所述通孔的内部内嵌有转动轴承,所述驱动马达输出轴的一端连接有传动杆,所述传动杆固定插接于转动轴承内部,且所述传动杆的一端固定于升降轮安装杆的侧壁上。
17.优选的,所述水箱的侧壁上连通有加水管,所述加水管的一端连通有软管,所述机身外壳上固定有用于连接水源的连通管,所述软管与连通管呈连通设置。
18.综上所述,由于采用了上述技术,本发明的有益效果是:
19.本发明中,通过缓冲组件的设计,配合水箱固定组件使用,能在无人机升降或者转弯时,通过缓冲组件缓冲惯性,并且由于水箱固定组件的可移动设计,配合缓冲组件使用能进一步提升缓冲效果,而且弹性橡胶顶块在具有固定效果的同时也具有一定的缓冲效果;
20.本发明中,通多在球形防护罩的内部分别安装有plc控制器、无线信号收发器、摄像头和用于无人机本体机械组件的驱动控制器,所述无线信号收发器与驱动控制器分别通过连接线与plc控制器电性连接,能通过无线信号收发器将摄像头采集到的信息传输至人工端,通过人工端将驱动命令回传至无线信号收发器,至无线信号收发器将命令发送至plc控制器,通过plc控制器对驱动控制器、发动机控制器和电磁阀进行控制,实现飞行航道的调整以及喷水灭火的实施。
附图说明
21.图1为本发明消防灭火用远程遥控越障无人机的结构示意图;
22.图2为本发明消防灭火用远程遥控越障无人机的侧视图;
23.图3为本发明机身水箱放置组件的结构示意图;
24.图4为本发明水箱的结构示意图;
25.图5为本发明铰接组件的结构示意图;
26.图6为本发明前端控制组件的结构示意图;
27.图7为本发明缓冲组件的结构示意图。
28.图中:1、无人机本体;2、前端控制组件;3、机身水箱放置组件;4、后端驱动组件;5、球形防护罩;6、plc控制器;7、无线信号收发器;8、驱动控制器;9、机身外壳;10、水箱;11、水箱固定组件;12、缓冲组件;13、凹槽;14、发动机控制器;15、导轨; 16、滑块;17、支撑板;18、挡板;19、弹性橡胶顶块;20、内杆; 21、套管;22、压缩弹簧;23、限位块;24、倾斜导流板;25、
出水管;26、波纹管;27、输送管;28、电磁阀;29、喷水管;30、摄像头;31、半球形透明罩体;32、旋转阻尼器;33、插接柱;34、升降轮安装杆;35、凹形块;36、驱动马达;37、转动轴承;38、传动杆;39、加水管;40、软管;41、连通管;42、铰接组件;43、升降轮;44、喷气式发动机。
具体实施方式
29.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
30.本发明提供了如图1-7所示的一种消防灭火用远程遥控越障无人机,包括无人机本体1,其特征在于:无人机本体1包括前端控制组件2、机身水箱放置组件3以及后端驱动组件4,无人机本体1机身的下表面通过铰接组件42铰接有升降轮43;铰接组件42包括凹形块35、旋转阻尼器32、插接柱33和升降轮安装杆34,旋转阻尼器32安装于凹形块35的内壁上,插接柱33插接于旋转阻尼器32 的内圈,升降轮安装杆34固定于插接柱33的一端,凹形块35的一侧安装有驱动马达36,凹形块35的侧壁上开设有通孔,通孔的内部内嵌有转动轴承37,驱动马达36输出轴的一端连接有传动杆38,传动杆38固定插接于转动轴承37内部,且传动杆38的一端固定于升降轮安装杆34的侧壁上;
31.前端控制组件2包括与机身水箱放置组件3相连接的球形防护罩5,球形防护罩5的内部分别安装有plc控制器6、无线信号收发器7和用于无人机本体1机械组件的驱动控制器8,无线信号收发器 7与驱动控制器8分别通过连接线与plc控制器6电性连接,前端控制组件2还包括摄像头30以及用于对摄像头30防护的半球形透明罩体31,半球形透明罩体31安装于球形防护罩5的上,括摄像头 30的拍摄端贯穿球形防护罩5位于半球形透明罩体31的内部,plc 控制器6功能指令cmp可进行数据比较,mov指令可进行数据传送, call指令可实现子程序调用,segl指令可将数据寄存器存储的故障参数在数码管显示出来,srmr指令可产生闪烁控制信号,用以输出声光报警信号;
32.该plc控制器6,扩展模块的高度和深度相同,宽度不同;它们之间用扁平电缆连接,紧密拼装后组成1个长方体,适合在机电一体化中使用。内置的24vdc电源,可做输人回路的电源和传感器的电源。它有32点输入和32点输出,24v直流输入,继电器输出;
33.摄像头30设置为远红外摄像头,且监控摄像头30的波长为 1.5-400微米,监控摄像头30包括镜头、感光元件、信号处理元件,外部光线通过镜头聚焦在感光元件上,感光元件与信号处理元件电连接,信号处理模块输出端输出模拟信号、数字信号或视频流;模拟信号为cvbs、s-video、vga;数字信号为itu-r bt.656、itu-rbt.601、itu-r bt.1120、dvi、hdmi;视频流为通过ethernet、wifi、 bluetooth、rs-232、rs-485、can传输,还包括有用于检测环境光照度的光线检测模块,光线检测模块包括多个扫描线、多个读取线以及多个光感测元件,每一光感测元件耦接该多个扫描线的一者以及该多个读取线的一者,该光线检
测方法包括:同时开启该多个扫描线的至少两者,用以开启该多个光感测元件中的多个耦接的光感测元件。
34.无线信号收发器7包括wifi天线、lte天线、射频开关、频分器以及处理器,射频开关包括第一输入端口、第二输入端口以及wifi 信号输出端口,频分器包括第三输入端口、第一输出端口以及第二输出端口,wifi天线与第一输入端口连接,lte天线与第三输入端口连接,第一输出端口与第二输入端口连接,频分器用于将lte天线接收的信号中的wifi信号以及lte信号分开,并将分开后的wifi 信号以及lte信号分别通过第一输出端口以及第二输出端口输出;
35.通多在球形防护罩5的内部分别安装有plc控制器6、无线信号收发器7、摄像头30和用于无人机本体1机械组件的驱动控制器8,无线信号收发器7与驱动控制器8分别通过连接线与plc控制器6 电性连接,能通过无线信号收发器7将摄像头30采集到的信息传输至人工端,通过人工端将驱动命令回传至无线信号收发器7,至无线信号收发器7将命令发送至plc控制器6,通过plc控制器6对驱动控制器8、发动机控制器14和电磁阀28进行控制,实现飞行航道的调整以及喷水灭火的实施。
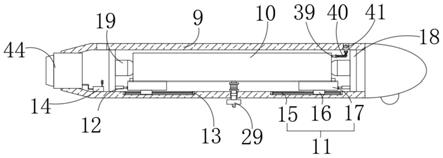
36.机身水箱放置组件3包括机身外壳9、水箱10、水箱固定组件 11和缓冲组件12,机身外壳9的内底部开设有凹槽13,水箱固定组件11安装于凹槽13的内部,缓冲组件12安装于机身外壳9的内部,且缓冲组件12的一端与水箱固定组件11相连接,水箱固定组件11 包括导轨15、滑块16和支撑板17,导轨15安装于凹槽13的内部,滑块16滑动安装于导轨15上,支撑板17安装于导轨15上表面;
37.机身外壳9的内部对称设置有两组挡板18,两组挡板18上均设置有弹性橡胶顶块19,弹性橡胶顶块19的一端均抵触于水箱10的外壁上,缓冲组件12安装于挡板18的侧壁上,缓冲组件12包括内杆20、套管21和压缩弹簧22,内杆20滑动插接于套管21的内部,内杆20位于套管21内部的一端固定有限位块23,压缩弹簧22设置于套管21的内部,压缩弹簧22的两端分别抵触于限位块23的侧壁上以及套管21的内底部;通过缓冲组件12的设计,配合水箱固定组件11使用,能在无人机升降或者转弯时,通过缓冲组件12缓冲惯性,并且由于水箱固定组件11的可移动设计,配合缓冲组件12 使用能进一步提升缓冲效果,而且弹性橡胶顶块19在具有固定效果的同时也具有一定的缓冲效果。
38.水箱10的内部对称设置有两组倾斜导流板24,倾斜导流板24 的最低端连通有出水管25,出水管25的一端设置有波纹管26,波纹管26下端连通有输送管27,输送管27上安装有电磁阀28,且输送管27的一端连通有喷水管29,喷水管29的下端呈线性等间距设置有喷头,水箱10的侧壁上连通有加水管39,加水管39的一端连通有软管40,机身外壳9上固定有用于连接水源的连通管41,软管 40与连通管41呈连通设置;
39.后端驱动组件4包括喷气式发动机44以及用于控制喷气式发动机44启停的发动机控制器14。
40.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存
在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。