1.本发明涉及一种压实压路机,该压实压路机包括:压路机滚筒装置,该压路机滚筒装置包括彼此紧挨布置的第一压路机滚筒和第二压路机滚筒;驱动装置,该驱动装置包括被布置为旋转所述第一压路机滚筒的第一驱动单元和被布置为旋转所述第二压路机滚筒的第二驱动单元。
背景技术:
2.压实压路机广泛地用于压实土壤和沥青,例如在道路和建筑物的施工中。
3.wo 2018/234844a1展示了具有彼此紧挨定位的两个圆柱形滚筒的压实压路机。该压路机由定位于圆柱形滚筒所限定的圆柱形空间内的一个或多个马达驱动。该压实压路机进一步包括定位于圆柱形滚筒所限定的圆柱形空间内的配重。
4.然而,该压路机被认为具有复杂的设计。而且,对这样的压路机进行服务和维护可能被认为是麻烦的。
技术实现要素:
5.因此,本发明的目的是提供一种改进的压实压路机。
6.通过以下的概述和描述将显而易见的该目的和其他目的通过根据所附权利要求的压实压路机实现。
7.根据本披露内容的一个方面,提供了一种压实压路机,该压实压路机包括:压路机滚筒装置,该压路机滚筒装置包括彼此紧挨布置的第一压路机滚筒和第二压路机滚筒;驱动装置,该驱动装置包括被布置为旋转所述第一压路机滚筒的第一驱动单元和被布置为旋转所述第二压路机滚筒的第二驱动单元;以及电源;其中,该压实压路机进一步包括连接到所述压路机滚筒装置的框架,其中,所述电源附接到所述框架、在该第一压路机滚筒和该第二压路机滚筒中每一个的外部上;以及电子平衡系统,用于在操作期间将该压实压路机保持在竖立位置。
8.因此提供了一种可以是自主或远程受控的自平衡压路机。该压路机可以显著减少施工现场所需的机器操作员的数量。该压路机的框架使电源能够位于压路机滚筒外部。电源的这种外部位置、即在压路机滚筒装置的压路机滚筒的外部,允许相对较大的电源。尤其是,当使用电动马达形式的驱动单元时,这是有利的,电动马达可能需要相对较大的电池组才能获得所需的范围。因此可以实现具有非常长工作周期的压实压路机,因为电源可以位于压路机滚筒外部。进一步,电源的外部位置有助于电源的充电、补充能量和/或更换。而且,这使得可以或至少更容易在压路机滚筒内部包括振动机构,因为电源的这种位置在压路机滚筒装置的压路机滚筒所限定的空间内为振动机构提供了空间。另一个优点是可以提供具有易于触及的服务点的压路机,这有助于压路机的维护和服务。此外,可以被设计成承载大量载荷的框架在压路机滚筒外部,有助于实现所需的静态线性载荷,并使压路机具有
非常高的静态线性载荷。因此,可以提供一种能够以非常高效的方式执行压实工作的压路机。
9.该电子平衡系统包括惯性测量单元和反馈控制系统。
10.根据一个实施例,惯性测量单元和/或反馈控制系统被布置在压实压路机的壳体和/或隔室内部。此实施例具有保护敏感部件免受损坏的优点。这样的壳体或隔室可以形成压实压路机的框架的一部分,或者可以由连接到压实压路机的框架的单独部分形成。
11.根据一个实施例,压实压路机是自主的,这可以很大程度上减少施工现场的施工工人的数量。
12.根据一个实施例,压实压路机包括用于动力压实的振动机构和/或振荡机构。
13.根据一个实施例,所述第一驱动单元和所述第二驱动单元中的至少一个包括电动马达,这提供了非常环境友好且有成本效益的压路机。此外,这种压路机提供了非常安静的工作环境。电池、优选锂离子电池和/或电能发生器可以用作用于驱动装置以及平衡系统的部件的电源。
14.根据一个实施例,所述第一驱动单元和所述第二驱动单元中的至少一个包括液压马达。
15.根据一个实施例,所述电源包括电池,和/或燃料电池和/或内燃发动机。
16.根据一个实施例,该压路机设置有至少一个刮板设备。优选地,所述刮板设备安装在该压路机的框架上。
17.根据一个实施例,该压路机设置有至少一个喷淋设备。优选地,所述喷淋设备安装至该压路机的框架。
18.根据一个实施例,该压路机设置有至少一个可折叠支架。优选地,所述可折叠支架安装至该压路机的框架。
19.本发明的这些和其他的方面将从下文描述的权利要求和实施例中变得清楚并且将参考其进行阐述。
附图说明
20.现在将参考附图更详细地描述本发明,在附图中:
21.图1展示了根据本披露内容的实施例的压实压路机。
22.图2是部分分解图并展示了图1所示的压实压路机的部件。
23.图3用于展示根据本披露内容的实施例的压实压路机的使用。
24.图4展示了用于将图1所示的压实压路机在不使用时保持在竖立位置的集成支撑设备。
25.图5展示了用于将根据本披露内容的振动压路机在不使用时保持在竖立位置的单独支撑设备。
具体实施方式
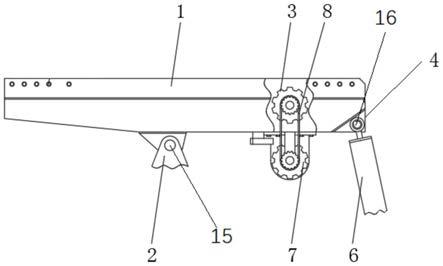
26.图1展示了根据本披露内容的实施例的自主振动压路机1的形式的压实压路机。
27.该振动压路机1包括压路机滚筒装置3、连接到压路机滚筒装置3的框架5、以及壳体7。
28.该压路机滚筒装置3包括以分离构型彼此紧挨布置的第一压路机滚筒9和第二压路机滚筒11,从而允许第一压路机滚筒9和第二压路机滚筒11独立旋转。
29.振动压路机1进一步包括用于驱动第一压路机滚筒9和第二压路机滚筒11中的每一个的驱动装置13。为此,驱动装置13包括被布置为旋转第一压路机滚筒9的第一驱动单元15和被布置为旋转第二压路机滚筒11的第二驱动单元(未示出)。第一驱动单元15和第二驱动单元中的每一个都连接到位于壳体7中的电源。
30.框架5包括箱形中心部分17、通过第一支承装置21在一侧连接到滚筒装置3的第一叉腿19、以及通过第二支承装置(未示出)在相反侧连接到滚筒装置3的第二叉腿(未示出)。从压路机滚筒装置3的纵向方向来看,叉腿19中的每个叉腿都具有倒u形状。中心框架部分17和可移除盖23一起形成振动压路机1的壳体7。
31.振动压路机1进一步包括用于动力压实的振动机构25。振动机构25包括可旋转轴27,两个相同的偏心质量块组件29安装到该可旋转轴上,并且该可旋转轴通过滚子轴承可旋转地布置。可旋转轴27和两个偏心质量块组件29一起形成通过第三驱动单元33旋转的偏心轴31。在偏心轴31旋转时,产生增加压路机滚筒装置3的压实力的循环力。每个偏心质量块组件29包括三个偏心质量块30、32、34,这三个偏心质量块中的两个偏心质量块固定至可旋转轴27,并且这三个偏心质量块中的一个偏心质量块可移动地安装在轴27上。每个可移动质量块32相对于固定质量块30、34在第一位置与第二位置之间自由旋转,在第一位置,在轴27沿一个方向旋转时该可移动质量块与两个固定质量块30、34协作,在第二位置,在轴27沿相反方向旋转时该可移动质量块部分地平衡两个固定质量块30、34。
32.当可移动质量块32位于它们相应的第一位置时,振动机构25在高幅度设置下操作,并且当可移动质量块32位于它们相应的第二位置时,振动机构27在低幅度设置下操作。
33.通过改变轴27的旋转方向,将幅度设置从一个切换到另一个。为此,每个可移动质量块32具有两个接合部分,这两个接合部分被配置成与紧固至两个固定质量块30、34的驱动销接合,以便随着轴27沿任何方向的旋转而与该轴一起旋转。因此可以通过偏心轴31的旋转方向来控制高幅度/低频率或低幅度/高频率。
34.振动压路机1进一步包括两个刮板设备35,刮板设备中的每个刮板设备都由中心框架部分17支撑。如图1所示,刮板设备35中的每个刮板设备都包括沿其长度分布的若干喷嘴37,这些喷嘴用于将液体、优选地水喷淋在压路机滚筒9、11的表面上。喷嘴37中的每个喷嘴通过液体管(未示出)连接到位于壳体7内的相应液体罐。喷嘴37、液体管、液体罐和水泵(未示出)一起形成喷淋系统,该喷淋系统被配置为保持压路机滚筒9、11湿润。
35.现在参考图2,在此实施例中为锂离子电池组39的电源位于壳体7的上部部分,在此实施例中为水箱41的液体罐位于壳体7的下部部分。因此电池组39和水箱41中的每一个都由框架5支撑在压路机滚筒装置3的压路机滚筒9、11的外部。电池组39的外部位置、在压路机滚筒9、11的外部,允许相对较大的电池组39和/或大的水箱41。进一步,这有助于电池组39的充电和/或更换,因为通过简单地移除盖23很容易触及它。
36.压实压路机1进一步包括平衡系统43,用于将振动压路机1在操作期间保持在竖立位置。平衡系统43包括惯性测量单元45、电气控制单元47和驱动控制单元49。如图2示意性所示,惯性测量单元45、电气控制单元47和驱动控制单元49中的每一个都位于框架5的中心框架部分17中并由其支撑。在此实施例中,惯性测量单元45、包括反馈控制系统的电气控制
单元47和驱动控制单元49中的每一个因此被布置在由框架5的中心框架部分17形成的隔室内部。
37.惯性测量单元45是能够测量和报告物体的比力和角速度等的电子设备。更具体地,惯性测量单元45通过使用一个或多个加速度计探测线性加速度和使用一个或多个陀螺仪探测角速率来工作的。惯性测量单元45感测框架5何时倾斜以及倾斜方向。举例来说,惯性测量单元45可以包括用于振动压路机1的横摆轴线的一个加速度计和陀螺仪以及用于振动压路机的俯仰轴线的一个加速度计和陀螺仪。然而,应当理解,惯性测量单元可以包含一个加速度计和陀螺仪,用于压实压路机的每个轴线:俯仰轴线、侧倾轴线和横摆轴线。可以使用市售的惯性测量单元(imu)。
38.电气控制单元47包括反馈控制系统,该反馈控制系统利用pid反馈控制环路通过对驱动装置13的两个驱动单元15进行控制来使振动压路机1保持在竖立位置。驱动单元15因此被控制以通过前后移动压路机来校正引起的倾斜角。驱动单元15中的每个驱动单元通过驱动控制单元49来控制。因此,在驱动单元15中的扭矩的帮助下,振动压路机1将保持其自身竖立、驱动前进、倒退或转向。为了转向,驱动控制单元49将控制驱动单元15,使得每个压路机滚筒9、11上都施加有不同方向的扭矩。
39.压路机1进一步包括位于框架5的中心框架部分17中并由其支撑的导航系统51。
40.图3展示了施工现场53,其中具有砾石的工作区域55由两个振动压路机来压实。第一压路机1a使用用于若干自主压路机的共用控制系统(未示出)自主控制,第二振动压路机1b由操作员57通过遥控器59进行远程控制。以自主振动压路机1c的形式连接到共用控制系统的第三振动压路机正在赶往工作区域55的路上,以协助第一振动压路机1a和第二振动压路机1b来压实工作区域55。连接到共用控制系统的导航系统51用于将压路机1c引导到工作区域55。
41.振动压路机1可以用于压实不同材料,比如沥青、砾石和不同类型的土壤,因此适用于多种应用。对于沥青,压路机可以跟随沥青压路机并压实由沥青压路机所铺设的区域。对于砾石,它可能会通过全球定位系统(gps)或其他导航系统而被指示压实某个区域。通过使用若干信标(至少3个)或通过学习轨迹,可以在数字地图上限制要压实的区域。
42.如图4所示,振动压路机1可以设置有支撑设备59,用于在平衡系统43未激活时将振动压路机1保持在竖立位置。支撑设备59包括两个可折叠支架61、63,这两个可折叠支架被配置为将压路机1固持在竖立位置。每个可折叠支架61、63都安装至压路机1的框架5。这种支撑设备59可以有助于在施工现场53对振动压路机进行充电和/或补充能量。此外,可以有助于压路机1往返施工现场53的运输和/或振动压路机1在不使用时的存放。应当理解,这种集成支撑设备可以包括被配置为将振动压路机固持在竖立或略微倾斜位置的一个单一可折叠支架。
43.应当理解,在所附权利要求的范围内,上述实施例的许多变体均是可能的。
44.在上文中,参考图1,已经描述了包括质量块组件的振动机构,每个质量块组件包括两个固定质量块和一个可移动质量块。应当理解,可以使用其他类型的双幅度振动机构。此外,应当理解,可以使用具有或多或少预定义幅度设定的振动机构,或具有连续可变幅度的振动机构。
45.在上文中,参考图1,已经描述了具有振动滚筒装置的压路机。应当理解,压路机可
以替代地配备有静态或振荡滚筒装置。
46.参考图4,还描述了当压路机的平衡系统未激活时,可以使用一个或多个可折叠支架将压路机保持在竖立位置。应当理解,当平衡系统未激活时,可以如图5所示使用一个或多个单独支撑结构65、67来替代这样的集成支撑设备59,以将振动压路机1保持在竖立位置。
47.在上文中,参考图2,已经描述了,惯性测量单元45和包括反馈控制系统的电气控制单元47中的每一个可以被布置在由框架5的中心框架部分17所形成的隔室内部。应当理解,惯性测量单元和/或反馈控制系统可以布置在壳体内部或由连接到压实压路机框架的单独部分形成的隔室内部。进一步,应当理解,惯性测量单元和/或反馈控制系统可以布置在压实压路机的壳体或隔室外部。惯性测量单元和/或反馈控制系统因此可以安装在压实压路机的框架上或安装在连接到框架的部件上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。