1.本发明涉及车辆控制装置、车辆控制方法以及车辆控制系统。
背景技术:
2.专利文献1公开了机动车的自动制动控制装置,其检测本车与障碍物的距离及相对速度并判断两者的接触可能性,在判断为有接触的可能性的情况下,自动地对各车轮作用制动压来将车辆制动。
3.所述自动制动控制装置在检测到驾驶员的转向操作时对每个车轮控制制动压,以提高车辆向其操作方向的转向性(turn-in ability)。
4.另外,所述自动制动装置仅在检测驾驶员的转向操作且本车和障碍物处于接近状态,而且仅通过基于制动压控制的车辆制动时无法避免本车与障碍物的接触的情况下,实施该对每个车轮的制动压控制。
5.现有技术文献
6.专利文献
7.专利文献1:(日本)特开平7-21500号公报
技术实现要素:
8.发明所要解决的技术问题
9.然而,在仅对车辆赋予制动力无法避免车辆与障碍物的接触的情况下,以驾驶员进行了转向操作为前提对每个车轮进行制动压控制的系统中,障碍物的紧急避让性有可能降低。
10.本发明的目的在于提供一种车辆控制装置、车辆控制方法和车辆控制系统,能够抑制障碍物的紧急避让性的降低。
11.用于解决技术问题的手段
12.在本发明的一方面中,取得第一碰撞风险,该第一碰撞风险是基于由外界识别部取得的所述车辆前方的障碍物与所述车辆的相对距离及相对速度的与相对于所述障碍物的碰撞风险相关的信息,基于所述第一碰撞风险,输出用于对所述车辆自动地赋予制动力的第一控制指令,在根据所述第一控制指令对所述车辆自动地赋予了制动力之后,取得将所述第一碰撞风险更新的第二碰撞风险,基于所述第二碰撞风险,输出用于对所述车辆自动地赋予与掌舵相关的力的第二控制指令,在根据所述第二控制指令对所述车辆自动地赋予了与掌舵相关的力之后,基于所述第二碰撞风险,输出用于控制在所述车辆的车轮部产生的制动力的第三控制指令。
13.根据本发明的一个实施方式,能够抑制障碍物的紧急避让性的降低。
附图说明
14.图1是车辆控制系统的构成图。
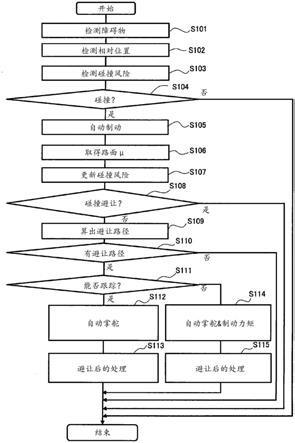
15.图2是表示碰撞避让控制的主程序的流程图。
16.图3是表示车辆与障碍物的位置关系的图。
17.图4是表示紧急自动掌舵模式中的处理内容的流程图。
18.图5是表示目标舵角与目标掌舵扭矩基准值之间的相关性的线图。
19.图6是表示碰撞富余时间ttc和修正增益kcol之间的相关性的线图。
20.图7是表示紧急自动掌舵模式和制动力矩赋予模式中的处理内容的流程图。
21.图8是表示在制动力矩赋予模式中决定制动液压(制动力)的变量α和偏差量
△
yg之间的相关性的线图。
22.图9是表示在制动力矩赋予模式中决定制动液压(制动力)的变量β和相对速度
△
vc之间的相关性的线图。
23.图10是表示在制动力矩赋予模式中的制动力的设定状态的图。
24.图11是表示制动力矩赋予模式开启
·
关闭所导致的行驶轨迹的差异的图。
25.图12是表示制动力矩赋予模式关闭状态下的偏航率、横向加速度、制动液压等的变化的时间图。
26.图13是表示在制动力矩赋予模式开启状态下的偏航率、横向加速度、制动液压等的变化的时间图。
27.图14是表示基于紧急自动掌舵模式的碰撞避让后的处理且是具备后摄像头时的处理的流程图。
28.图15是表示基于紧急自动掌舵模式的碰撞避让后的处理中返回手动驾驶时的掌舵扭矩和制动液压的变化的时间图。
29.图16是表示基于紧急自动掌舵模式的碰撞避让后的处理中直到停车为止继续紧急自动制动模式时的掌舵扭矩和制动液压的变化的时间图。
30.图17是表示基于紧急自动掌舵模式的碰撞避让后的处理中使车辆缓慢减速时的掌舵扭矩和制动液压的变化的时间图。
31.图18是表示基于紧急自动掌舵模式的碰撞避让后的处理且是不具备后摄像头时的处理的流程图。
32.图19是表示基于紧急自动掌舵模式和制动力矩赋予模式的碰撞避让后的处理且是具有后摄像头时的处理的流程图。
33.图20是表示基于紧急自动掌舵模式和制动模式赋予模式的碰撞避让后的处理中返回手动驾驶时的掌舵扭矩和制动液压的变化的时间图。
34.图21是表示基于紧急自动掌舵模式和制动模式赋予模式的碰撞避让后的处理中直到停车为止继续紧急自动制动模式时的掌舵扭矩及制动液压的变化的时间图。
35.图22是表示基于紧急自动掌舵模式和制动力矩赋予模式的碰撞避让后的处理中使车辆缓慢减速时的掌舵扭矩和制动液压的变化的时间图。
36.图23是表示基于紧急自动掌舵模式和制动力矩赋予模式的碰撞避让后的处理且是不具有后摄像头时的流程图。
具体实施方式
37.以下,基于附图说明本发明实施方式的车辆控制装置、车辆控制方法以及车辆控
制系统的实施方式。
38.图1是表示车辆控制系统20的一个方式的框图。
39.另外,图1的车辆1是四轮机动车,具备经由电动助力转向装置那样的方向盘的旋转动作来转舵前轮的掌舵装置、以及控制掌舵装置的电子控制装置,另外,还具有通过摄像头、雷达、gps(global positioning system:全球定位系统)和地图信息的并用等取得车辆前方的道路信息等外界信息的外界识别装置、取得与车辆1的行驶速度和车辆1的行驶状态相关的信息等的防侧滑装置等的装置,并且能够进行辅助驾驶或自动驾驶。
40.车辆1具有由左前轮2l、右前轮2r、左后轮3l、右后轮3r构成的车轮部。
41.各车轮2l、2r、3l、3r分别具备构成液压式制动装置21的轮缸4l、4r、5l、5r。
42.作为制动控制装置的轮缸液压控制装置6是从车辆信息取得装置7取得各种车辆信息等,并控制施加给各轮缸4l、4r、5l、5r的制动液压的以防侧滑装置为代表的电子控制装置。
43.另外,本实施方式的车辆1具备液压式制动装置21作为制动装置,但可以代替液压式制动装置21而具备电动制动装置,制动力的控制不限定于液压控制。
44.车辆信息取得装置7具备取得车辆1的行驶速度(车体速度)的速度取得部、取得车辆1的减速度的减速度取得部、取得车辆1的规格信息的规格信息取得部等。
45.电动助力转向装置8是利用作为掌舵驱动器的电动机产生的扭矩,辅助驾驶员对操作方向盘9的操作,并且通过电动机能够实现前轮2l、2r的自动掌舵的掌舵控制装置。
46.电动助力转向装置8除了电动机之外,还具备检测掌舵扭矩(转向扭矩)的掌舵扭矩传感器、驱动电动机的驱动电路、控制电动机的产生扭矩的控制电路等。
47.第一外界识别装置10a是使用摄像头或雷达等取得车辆前方的道路信息或障碍物的信息等外界信息的第一外界识别部。另外,第二外界识别装置10b是使用摄像头或雷达等取得在本车的后方行驶的其他车辆等外界信息的第二外界识别部。
48.另外,车辆1可具有获取全方位的外界信息的外界识别装置,并且不限于在前后具有外界识别装置的系统。
49.车辆控制装置11是以微型计算机11a为主体的电子控制装置,其包括处理器、存储器、i/o以及连接这些的总线,微型计算机11a作为控制部发挥作用,该控制部基于输入的各种信息进行运算并输出运算结果。
50.车辆控制装置11作为软件具备驾驶辅助功能,其基于从外界识别装置10a、10b、车辆信息取得装置7等取得的各种信息,自动地控制制动及掌舵,以避免车辆1与前方的障碍物碰撞。
51.而且,车辆控制装置11将用于碰撞避让的掌舵扭矩指令作为掌舵控制指令输出到电动助力转向装置8,并且,将用于碰撞避让的目标制动液压的指令作为制动控制指令输出到轮缸液压控制装置6。
52.以下,详细说明车辆控制装置11进行的用于碰撞避让的掌舵控制及制动控制。
53.图2是表示车辆控制装置11实施的碰撞避让控制的主程序的流程图。
54.车辆控制装置11首先在步骤s101中,基于从第一外界识别装置10a取得的车辆前方的外界信息,检测车辆前方的障碍物。
55.并且,车辆控制装置11在车辆前方检测出障碍物的情况下,在接下来的步骤s102
中,把握车辆1与障碍物的相对位置关系。
56.另外,障碍物包括静止的立体物即静止物和移动的立体物即移动物。
57.图3示例了车辆1与障碍物的相对位置关系。
58.车辆控制装置11在步骤s102中将图3所示的车辆1与障碍物的相对距离d[m]、从车辆1的行驶轨道的中心sl到障碍物的距离l[m]、以及车辆1与障碍物的相对速度
△
v[m/s]作为表示车辆1与障碍物的相对位置关系的物理量来求出。
[0059]
另外,在图3中,w是车辆1的全宽[m]。
[0060]
然后,车辆控制装置11在步骤s103中,基于相对距离d和相对速度
△
v算出到车辆1与障碍物碰撞为止的时间即碰撞富余时间ttc[s],作为表示碰撞风险的指标。
[0061]
即,车辆控制装置11在步骤s103中基于由第一外界识别装置10a取得的车辆1前方的障碍物与车辆1的相对距离d以及相对速度
△
v,取得与相对于障碍物的碰撞风险相关的信息即第一碰撞风险。
[0062]
车辆控制装置11在接下来的步骤s104中,比较在步骤s103中求出的碰撞富余时间ttc和第一阈值th1,并判断有无车辆1与障碍物碰撞的可能性。
[0063]
第一阈值th1是用于区分有无用于碰撞避让的自动制动的实施要求,换言之,用于区别是否存在驾驶辅助的介入要求的碰撞富余时间ttc的临界值。
[0064]
并且,碰撞富余时间ttc为第一阈值th1以下的状态是车辆1可能与障碍物碰撞,要求实施用于碰撞避让的自动制动的状态。
[0065]
另一方面,碰撞富余时间ttc比第一阈值th1长的状态是没有要求实施用于碰撞避让的自动制动等的紧急性的状态。
[0066]
车辆控制装置11在碰撞富余时间ttc为第一阈值th1以下且要求实施碰撞避让控制的情况下,进行到步骤s105以后,实施用于碰撞避让的自动制动。另外,在本技术中,将用于碰撞避让的自动制动控制称为紧急自动制动模式。
[0067]
另一方面,车辆控制装置11在碰撞富余时间tc比第一阈值th1长且不需要实施用于碰撞避让的自动制动的情况下,不实施自动制动即紧急自动制动模式,并结束本流程。
[0068]
车辆控制装置11在步骤s105中,作为碰撞避让控制的第一阶段执行紧急自动制动模式,向轮缸液压控制装置6输出用于碰撞避让的制动指令。
[0069]
即,紧急自动制动模式相当于aeb(autonomous emergency braking:自动紧急制动)装置。
[0070]
在紧急自动制动模式中,车辆控制装置11例如设定使车辆1不与障碍物碰撞而在障碍物的跟前停止的目标减速度,生成用于使车辆1的减速度为目标减速度的制动指令,将生成的制动指令向轮缸液压控制装置6输出。
[0071]
轮缸液压控制装置6将与从车辆控制装置11取得的制动指令对应的制动液压赋予轮缸4l、4r、5l、5r对车辆1自动地赋予制动力。
[0072]
这样,车辆控制装置11基于在步骤s103中求出的第一碰撞风险,在步骤s105中,输出用于对车辆1自动地赋予制动力的第一控制指令。
[0073]
车辆控制装置11在步骤s105中执行紧急自动制动模式时,在接下来的步骤s106中,根据输出了用于使车辆1的减速度为目标减速度的制动指令时的实际减速度,求出车辆1行驶的路面的摩擦系数μ。
[0074]
然后,车辆控制装置11在步骤s107中,求出第二碰撞风险,该第二碰撞风险是加上了在步骤s106中求出的路面的摩擦系数μ的信息的碰撞风险。
[0075]
即,车辆控制装置11在对车辆1自动地赋予了制动力之后,加上有关路面摩擦系数μ的信息,取得将第一碰撞风险更新的第二碰撞风险。
[0076]
换言之,车辆控制装置11基于对车辆1自动地赋予制动力后求出的与实际路面的摩擦系数μ相关的信息,推定在当前的行驶路面上可实现的减速度,并基于推定的减速度判断碰撞风险。
[0077]
在路面的摩擦系数μ小于基准值的情况下,与路面的摩擦系数为基准值时相比,能够实现的减速度变小,车辆1的制动距离延长。
[0078]
因此,车辆控制装置11在路面的摩擦系数μ小于基准值的情况下,以判断与路面的摩擦系数μ为基准值时相比碰撞风险更高的方式,对基于相对速度
△
v[m/s]和相对距离d[m]的碰撞富余时间ttc进行减少修正。
[0079]
另外,车辆控制装置11能够代替碰撞富余时间ttc,将碰撞富余度mtc作为碰撞风险的指标值进行运算。
[0080]
碰撞富余度mtc是表示是否本车辆即使急速减速也会与障碍物发生碰撞的指标值,在障碍物为静止物的情况下,以相对距离d除以本车制动距离后的无量纲量来定义。
[0081]
并且,碰撞富余度mtc为1以下的情况表示即使本车辆进行急减速也与障碍物发生碰撞的可能性高。
[0082]
在此,车辆控制装置11在步骤s103中求出作为碰撞风险的指标值的碰撞富余度mtc时,将作为本车制动距离基础的减速度设定为基于干燥路面的摩擦系数μ的值。
[0083]
另一方面,车辆控制装置11在步骤s107中,加上在与实际路面的摩擦系数μ相关的信息求出碰撞富余度mtc时,将作为本车制动距离的基础的减速度设定为基于在步骤s106求出的实际路面的摩擦系数μ的值。
[0084]
接着,车辆控制装置11进入步骤s108,判断在通过紧急自动制动模式的紧急制动是否能够避免车辆1与障碍物碰撞。
[0085]
在此,车辆控制装置11在步骤s107中加上与路面的摩擦系数μ相关的信息求出的碰撞富余时间ttc在第二阈值th2以下、且在用于使车辆1在障碍物跟前停止的目标减速度的绝对值大于阈值时,判断为仅通过紧急自动制动模式的紧急制动无法避免车辆1与障碍物碰撞。
[0086]
另外,车辆控制装置11在作为碰撞风险的指标值运算碰撞富余度mtc的情况下,在步骤s107中加上与实际路面的摩擦系数μ相关的信息而求出的碰撞富余度mt为1以下时,判断为仅通过基于紧急自动制动模式的紧急制动不能避免车辆1与障碍物发生碰撞。
[0087]
车辆控制装置11在步骤s108中,若判断为仅通过紧急自动制动模式的紧急制动无法避免车辆1与障碍物碰撞,则在进入步骤s109以后,将对车辆1自动地赋予与掌舵相关的力的紧急自动掌舵模式作为碰撞避让控制的第二阶段执行,并向电动助力转向装置8输出用于碰撞避让的控制指令。
[0088]
上述紧急自动掌舵模式相当于aes(autonomous emergency steering:自动应急转向)装置。
[0089]
即,车辆控制装置11基于在步骤s107中求出的第二碰撞风险,输出用于对车辆1自
动地赋予与掌舵相关的力的第二控制指令。
[0090]
另一方面,车辆控制装置11若判断为通过紧急自动制动模式的紧急制动能够避免车辆1与障碍物碰撞,则直接结束本程序,由此不执行紧急自动掌舵模式,继续进行紧急自动制动模式以实现碰撞避让。
[0091]
车辆控制装置11在步骤s109中,从车辆1与障碍物的相对位置关系和道路信息等求出作为避免与障碍物碰撞所需的车辆1的目标路径的避让路径、换言之车辆1用于绕过障碍物的目标行驶轨迹。
[0092]
接着,车辆控制装置11在步骤s110中判断是否有适合跟踪的避让路径。
[0093]
在此,车辆控制装置11例如可将能够在同一车道内绕过障碍物的路径判断为适合跟踪的避让路径,或者以在本车周围不存在其他车辆为条件允许设定避让路径。
[0094]
车辆控制装置11在没有适合的避让路径的情况下,直接结束本程序,由此不执行紧急自动掌舵模式而继续紧急自动制动模式,以减轻碰撞危害。
[0095]
另一方面,车辆控制装置11在具有适合的避让路径的情况下,进入步骤s111,基于为使车辆1跟踪避让路径行驶所需的横向加速度等来判断通过紧急自动掌舵模式的掌舵控制能否使车辆1跟踪避让路径来行驶。
[0096]
在此,在通过紧急自动掌舵模式能够使车辆1跟踪避让路径的情况下,车辆控制装置11进入步骤s112,继续紧急自动制动模式的同时,通过紧急自动掌舵模式的掌舵控制使车辆1沿着避让路径行驶,绕过障碍物,接着,在步骤s113中实施碰撞避让后的处理。
[0097]
另一方面,在通过紧急自动掌舵模式无法使车辆1跟踪避让路径的情况下,车辆控制装置11进入步骤s114及步骤s115,为了使车辆1跟踪避让路径,执行紧急自动掌舵模式及通过将转弯外轮的制动力设定得比转弯内轮的制动力低而产生转弯力矩的制动力矩赋予模式,之后,在步骤s115中实施碰撞避让后的处理。
[0098]
以下说明上述步骤s112~步骤s115中的处理内容的详细内容。
[0099]
图4是表示图2的流程图的步骤s112的处理内容、即在通过紧急自动掌舵模式使车辆1能够跟踪避让路径的情况下的紧急自动掌舵模式的掌舵控制的内容的流程图。
[0100]
车辆控制装置11在步骤s201中算出用于使车辆1沿着避让路径行驶的目标舵角θtgt[rad]。
[0101]
接着,在步骤s202中,车辆控制装置11算出使方向盘9的角度达到目标舵角θtgt所需的掌舵扭矩,作为目标掌舵扭矩基准值tref[nm]。
[0102]
在此,目标掌舵扭矩基准值tref是根据依据车身速度v及目标舵角θtgt产生的自我调整扭矩而作用于方向盘9的扭矩(转向扭矩)的目标值。
[0103]
车辆控制装置11通过设定作用于方向盘9的扭矩的目标值,在向电动助力转向装置8赋予相关的目标扭矩的指令时,能够使电动机的发生扭矩和驾驶员操作方向盘9时的掌舵扭矩并存,能够实现抑制驾驶员不适感的掌舵控制。
[0104]
图5是表示相对于车身速度v和目标舵角θtgt的目标掌舵扭矩基准值tref的特性的一例的线图。
[0105]
车辆控制装置11在目标舵角θtgt越大,将目标掌舵扭矩基准值tref设定为越高的值,并且,在车身速度v越快,将目标掌舵扭矩基准值tref设定为越高的值。
[0106]
接着,车辆控制装置11在步骤s203中,基于表示碰撞风险的碰撞富余时间ttc计算
用于修正目标掌舵扭矩基准值tref的修正值即修正增益kcol(kcol》1.0)。
[0107]
在此,车辆控制装置11在碰撞富余时间ttc越短且碰撞风险越高时,越增大修正增益kcol,以在碰撞富余时间ttc短且碰撞风险越高时,使最终的目标掌舵扭矩ttgt越大。
[0108]
如果实际的掌舵角对目标掌舵扭矩ttgt指令的响应延迟较大,则有可能无法避免与障碍物的碰撞。
[0109]
因此,车辆控制装置11在碰撞风险高时,换言之,在碰撞富余时间ttc短时,通过向电动助力转向装置8赋予比目标掌舵扭矩基准值tref高的目标掌舵扭矩ttgt的指令,减小掌舵响应的延迟,抑制碰撞避免性的降低。
[0110]
图6表示修正增益kcol相对于碰撞富余时间ttc的特性的一例。
[0111]
在碰撞富余时间ttc比第一时间t1长时,车辆控制装置1将修正增益kcol设定为最小值kcolmin即1.0。
[0112]
另外,在碰撞富余时间tc在第一时间t1以下且比第二时间t2(t1》t2)长的区域,车辆控制装置11随着碰撞富余时间ttc变短,换言之,随着碰撞风险增大,成比例地增大修正增益kcol。
[0113]
然后,当碰撞富余时间ttc为第二时间t2以下时,车辆控制装置11将修正增益kcol保持在最大值kcolmax(kcolmax》1.0)。
[0114]
车辆控制装置11在步骤s203中设定修正增益kcol时,接下来进入步骤s204,在目标掌舵扭矩基准值tref上乘以修正增益kcol算出最终的目标掌舵扭矩ttgt(ttgt=tref
×
kcol)
[0115]
然后,在接下来的步骤s205中,车辆控制装置11将目标掌舵扭矩ttgt的指令作为转向扭矩指令输出到电动助力转向装置8。
[0116]
即,车辆控制装置11除了关于路面的摩擦系数μ的信息之外,还基于更新的碰撞风险,将用于对车辆1自动地赋予与掌舵相关的力的第二控制指令输出到作为掌舵控制装置的电动助力转向装置8。
[0117]
图7是表示图2的流程图的步骤s114中的处理内容、即仅由紧急自动掌舵模式无法使车辆1跟踪避让路径,通过执行紧急自动掌舵模式及制动力矩赋予模式使车辆1跟踪避让路径时的掌舵控制及制动力控制的内容的流程图。
[0118]
在此,步骤s301至步骤s305的紧急自动掌舵模式的掌舵控制的内容与图4的步骤s201至步骤s205的处理相同,因此省略详细的说明。
[0119]
车辆控制装置11若在步骤s301~步骤s305中执行紧急自动掌舵模式下的掌舵控制,则进而在步骤s306以后,通过使转弯外轮的制动力比转弯内轮的制动力低,执行使车辆1产生转弯力矩的制动力矩赋予模式。
[0120]
即,车辆控制装置11在根据第二控制指令对车辆1自动地赋予了掌舵相关的力之后,基于第二碰撞风险,输出用于控制在车辆1的车轮部产生的制动力的第三控制指令。在此,车辆控制装置11根据车辆1相对于障碍物的避让路径,求出第三控制指令。
[0121]
车辆控制装置11在步骤s306中,将车辆1跟踪避让路径地行驶时的在避让路径的各目标点的横向加速度作为规范横向加速度laref而算出。
[0122]
在此,车辆控制装置11求出在避让路径的各目标点的横向力,根据求出的横向力和车辆质量计算各目标点的规范横向加速度laref。
[0123]
接着,车辆控制装置11进入步骤s307,将在步骤s306中求出的各目标点中的规范横向加速度laref中的最大值作为最大规范横向加速度larefmax而求出。
[0124]
然后,在接下来的步骤s308中,车辆控制装置11算出最大规范横向加速度larefmax和相当于路面的摩擦系数μ的加速度的偏差量
△
yg。
[0125]
接着,车辆控制装置11基于偏差量
△
yg确定第一变量α[%]。
[0126]
所述第一变量α是用于在通过使转弯外轮的制动液压降低来产生转弯力矩的制动力矩赋予模式中,设定转弯外轮的制动液压的降低程度的变量。
[0127]
另外,转弯外轮是指,在为了碰撞避让的掌舵所进行的车辆1的转弯行驶中,成为转弯外侧的前后轮。另外,如后所述,第一变量α的值越大,车辆控制装置11对转弯外轮的制动液压更大地减压。
[0128]
图8是表示第一变量α和偏差量
△
yg之间的相关性的一例的图。
[0129]
车辆控制装置11在偏差量
△
yg为从零到第一偏差量
△
yg1(
△
yg1>o)之间时,将第一变量α设定为零。
[0130]
另外,车辆控制装置11在偏差量
△
yg在从第一偏差量
△
yg1到第二偏差量
△
yg2(
△
yg1《
△
yg2)之间时,根据偏差量
△
yg的增大成比例地增加第一变量α,在偏差量
△
yg为第二偏差量
△
yg2以上时,将第一变量α保持为最大值(0%《最大值≤100%)。
[0131]
即,偏差量
△
yg越大,换言之,路面的摩擦系数μ越小,车辆控制装置11将第一变量α就设定为越大的值。
[0132]
接着,车辆控制装置11进入步骤s310,基于车辆1与障碍物接触时的相对速度
△
vc,确定用于设定转弯外轮的制动液压的降低程度的第二变量β[%]。
[0133]
另外,车辆控制装置11基于当前时刻的相对距离d、相对速度
△
v以及减速度来估计相对速度
△
vc。
[0134]
另外,如后所述,第二变量β的值越大,车辆控制装置11对转弯外轮的制动液压更大地减压。
[0135]
图9是表示第二变量β与相对速度
△
vc之间的相关性的一例的图。
[0136]
车辆控制装置11在相对速度
△
vc处于零到第一相对速度
△
vc1(
△
vc1》0)之间时,将第二变量α设定为零。
[0137]
另外,车辆控制装置11在相对速度
△
vc处于第一相对速度
△
vc1到第二相对速度
△
vc2(
△
vc1《
△
vc2)之间时,根据相对速度
△
vc的增大成比例地增加第二变量β,在相对速度
△
vc是第二相对速度
△
vc2以上时,将第二变量β保持为最大值(0%《最大值≤100%)。
[0138]
即,车辆控制装置11在车辆1与障碍物接触时的相对速度
△
vc越大,将第二变量β设定为越大的值。
[0139]
当确定第一变量α及第二变量β后,车辆控制装置11进入步骤s311,进行将转弯外轮的制动液压从紧急自动制动模式(aeb)下的制动液压降低与第一变量α及第二变量β对应的减少修正量的设定。
[0140]
即,车辆控制装置11基于从避让路径求出的在车辆1产生的横向加速度以及车辆1与障碍物的相对速度,求出用于减少车轮部中的转弯外轮的制动力的第三控制指令。
[0141]
在此,将紧急自动制动模式下的制动液压设为p0,将基于第一变量α及第二变量β的修正后的转弯外轮的制动液压设为p1时,根据以下的公式(1)求出转弯外轮的制动液压
p1。
[0142]
p1=p0
×
(1-α/100
·
β/100)
…
(1)
[0143]
即,车辆控制装置11相对于最大规范横向加速度larefmax路面的摩擦系数μ越小偏差量
△
yg越大,则使转弯外轮的制动液压p1进一步降低,并且,车辆1与障碍物接触时的相对速度
△
vc越快,进一步降低转弯外轮的制动液压p1。
[0144]
车辆控制装置11在制动力矩赋予模式中,如前所述地根据偏差量
△
yg和相对速度
△
vc,使转弯外轮的制动液压从紧急自动制动模式下的制动液压p0减少,关于转弯内轮的制动液压,保持在紧急自动制动模式下的制动液压p0。
[0145]
图10是示意性地表示制动力矩赋予模式中的各轮的制动力的设置状态的图。
[0146]
车辆控制装置11在制动力矩赋予模式中,将转弯内轮的制动液压保持在紧急自动制动模式下的制动液压p0,另外,使转弯外轮的制动液压从紧急自动制动模式下的制动液压p0减小,故而,使转弯外轮的制动液压比转弯内轮的制动液压低。
[0147]
换言之,在制动力矩赋予模式中,使转弯外轮的制动力比转弯内轮的制动力低。
[0148]
根据该转弯外轮的制动液压与转弯内轮的制动液压之差,产生将车辆1的方向朝向转弯内侧而改变的转弯力矩。
[0149]
因此,在通过紧急自动掌舵模式难以使车辆1跟踪避让路径时,通过执行制动力矩赋予模式,能够改善对避让路径的跟踪性,能够抑制车辆1与障碍物碰撞。
[0150]
图11表示在通过紧急自动掌舵模式难以使车辆1跟踪避让路径的状况下,执行了制动力矩赋予模式时和不执行制动力矩赋予模式时的车辆1的行驶轨迹的不同。
[0151]
车辆控制装置11在基于碰撞风险执行了紧急自动制动模式之后,从紧急自动制动模式下的减速度求出路面的摩擦系数μ并更新碰撞风险。
[0152]
而且,当推定为通过紧急自动制动模式的自动制动不能使车辆1在障碍物的跟前停止时,车辆控制装置11执行紧急自动掌舵模式,在执行了紧急自动掌舵模式之后,根据是否可通过紧急自动掌舵模式跟踪避让路径来执行制动力矩赋予模式。
[0153]
在此,车辆1在积雪路等摩擦系数μ低的路面上行驶的情况下,通过紧急自动掌舵模式无法使车辆1跟踪避让路径,车辆1有可能与障碍物接触。
[0154]
在这样的状况下,如果车辆控制装置11执行制动力矩赋予模式,则车辆1的转弯性(转向性)增加,对避让路径的跟踪性得以改善,能够避免车辆1与障碍物接触。
[0155]
图12和图13是用于说明在通过紧急自动掌舵模式难以使车辆1跟踪避让路径的状况下,执行制动力矩赋予模式时和不执行制动力矩赋予模式时的车辆1的驾驶状态、掌舵角、制动液压的差异的时间图。
[0156]
另外,图12表示不执行制动力矩赋予模式时的车辆状态,图13表示执行了制动力矩赋予模式时的车辆状态。另外,图12和图13示例为了避开障碍物而使车辆1右转弯的情况。
[0157]
在图12所示的不执行制动力矩赋予模式的情况下,即使通过紧急自动掌舵模式控制掌舵角,由于转舵轮的滑动,横向加速度也不上升,在偏航率较低的状态下推移,结果,车辆1的行驶轨迹有可能不跟踪避让路径而发生车辆1和障碍物的接触。
[0158]
另外,在图12中,各车轮的制动液压在紧急自动制动模式开始执行后发生变动,这是由于防抱死制动系统(abs)的动作引起的变动。
[0159]
另一方面,在执行图13所示的制动力矩赋予模式的情况下,制动力矩赋予模式使作为转弯外轮的左前轮2l和左后轮3l的制动液压比作为转弯内轮的右前轮2r和右后轮3r的制动液压低,产生使车辆1朝向避让路径的转弯方向的转弯力矩。
[0160]
因此,与不执行制动力矩赋予模式的情况相比,横向加速度和偏航率上升,掌舵角降低,结果使车辆1的行驶轨迹跟踪避让路径,能够抑制车辆1与障碍物的接触的发生。
[0161]
另外,车辆控制装置11作为用于控制在车轮部产生的制动力的第三控制指令,能够输出降低所有四轮的制动液压的指令。
[0162]
换言之,车辆控制装置11可代替减少车轮部中转弯外轮的制动力的制动力矩赋予模式,执行使车轮部的所有车轮的制动力全部减少的模式。
[0163]
如果车辆控制装置11使全轮的制动力从紧急自动制动模式下的制动液压p0降低,则在各车轮产生的横向力增加,改善了对避让路径的跟踪性,能够避让障碍物。
[0164]
但是,与减少全轮制动力的模式相比,制动力矩赋予模式使横向加速度和偏航率提高,车辆的转向性进一步提高。另外,制动力矩赋予模式能够充分确保避开障碍物时的路面环境的稳健性,避开障碍物的成功率比减少全轮制动力的模式高。
[0165]
图14是表示图2的流程图的步骤s113中的处理内容、即在不执行制动力矩赋予模式而通过紧急自动掌舵模式使车辆1跟踪避让路径时的障碍物避让后的处理。
[0166]
另外,图14的流程图所示的处理是车辆1具有取得车辆后方的外界信息的后置摄像头等第二外界识别装置10b的系统的处理。
[0167]
车辆控制装置11首先在步骤s401中判断障碍物的避让是否完成。
[0168]
然后,在障碍物的避让未完成的情况下,车辆控制装置11进入步骤s402,通过紧急自动掌舵模式的继续,使车辆1沿着避让路径行驶。
[0169]
另一方面,当障碍物的避让完成的情况下,车辆控制装置11进入步骤s403,判断作为车辆1的乘员的驾驶员是否进行了方向盘9或制动踏板等的驾驶操作。
[0170]
当驾驶员进行了驾驶操作时,车辆控制装置11进入步骤s404,解除紧急自动制动模式及紧急自动掌舵模式,使车辆1回归到手动驾驶状态。
[0171]
图15是示例车辆控制装置11在图2的步骤s112中执行紧急自动掌舵模式,在接下来的步骤s113中,在避让完成后使之回归到手动驾驶时的掌舵扭矩和制动液压的变化的时间图。
[0172]
车辆控制装置11在时刻t1开始紧急自动制动模式时,首先使四轮的制动液压预增压,然后在时刻t2使之增压至用于紧急停止的制动液压p0。
[0173]
在通过紧急自动制动模式设定为制动液压p0的状态的时刻t3,车辆控制装置11基于碰撞风险开始紧急自动掌舵模式,赋予用于使车辆1跟踪避让路径的掌舵扭矩。
[0174]
并且,通过执行紧急自动制动模式及紧急自动掌舵模式,当在时刻t4车辆1避开了障碍物时,车辆控制装置11将四轮的制动液压在从时刻t4到时刻t5之间从基于紧急自动制动模式的压力液压p0返回到零。
[0175]
另外,车辆控制装置11在紧急自动掌舵模式下使掌舵电动机产生的掌舵扭矩在从时刻t4到时刻t5的期间返回到零,解除紧急自动制动模式及紧急自动掌舵模式,使车辆1恢复到手动驾驶状态。
[0176]
车辆控制装置11在图14的流程图的步骤s403中,判断为没有驾驶员的驾驶操作
时,进入步骤s405,判断车辆1是否在同一车道内避让了障碍物。
[0177]
在此,在车辆1在同一车道内避让了障碍物的情况下,车辆控制装置11进入步骤s406,解除紧急自动掌舵模式的掌舵控制,另一方面,在车辆1停止之前,继续进行紧急自动制动模式的制动控制。
[0178]
在没有驾驶员的驾驶操作的情况下,有可能成为驾驶员无法进行驾驶操作的状况,并且,能够在同一车道内避让开障碍物,因此能够迅速使车辆1停止。
[0179]
因此,车辆控制装置11在障碍物的避让完成时解除紧急自动掌舵模式的掌舵控制,但在障碍物的避让完成后也继续紧急自动制动模式使车辆1停止。
[0180]
图16是示例车辆控制装置11在图2的步骤s112中执行紧急自动掌舵模式,在接下来的步骤s113中继续紧急自动制动模式直至停车为止时的掌舵扭矩和制动液压的变化的时间图。
[0181]
在时刻t4完成障碍物的避让后,车辆控制装置11在紧急自动掌舵模式下将掌舵电动机产生的掌舵扭矩恢复到零,但将四轮的制动液压保持在紧急自动制动模式下的制动液压p0,使车辆1急速减速并停止。
[0182]
另一方面,车辆控制装置11在步骤s405中判断为车辆1在同一车道内无法避开障碍物,且通过向相邻的车道移动而避开了障碍物的情况下,进入步骤s407。
[0183]
即,车辆1在单侧两车道以上的道路行驶时,通过紧急自动掌舵模式的掌舵控制,实施了为了绕过障碍物而使车辆1移动到相邻车道的车道变更的情况下,换言之,在避让路径跨越了划分车道的区间线(白线)的情况下,车辆控制装置11进入步骤s407。
[0184]
车辆控制装置11在步骤s407中,基于由第二外界识别装置10b取得的车辆后方的外界信息,判断在为了碰撞避让而移动的车道上在本车的后方是否有后续车。
[0185]
然后,在没有后续车的情况下,车辆控制装置11前进到步骤s408,与步骤s406同样,解除由紧急自动掌舵模式进行的掌舵控制,另一方面,在车辆1停止之前使紧急自动制动模式的自动制动继续(参照图16)。
[0186]
即使为了避开障碍物而进行了车道变更,在变更后的车道上没有后续车的情况下,即使本车紧急停止也不会造成对其他车辆的阻碍,所以车辆控制装置11使车辆1紧急停车。
[0187]
另一方面,在为了避开障碍物而进行了车道变更,且在变更后的车道上有后续车时,若车辆1紧急停止,则后续车辆有可能紧急接近车辆1。
[0188]
因此,车辆控制装置11为了避开障碍物而进行车道变更,并且,在变更后的车道上有后续车的情况下,进入步骤s409,解除紧急自动掌舵模式的掌舵控制,另外,使车辆1缓慢减速并使其停止。
[0189]
在步骤s49中,车辆控制装置11通过使各轮的制动液压从用于避开障碍物的紧急自动制动模式的制动液压p0下降来继续制动,从而使车辆1缓慢减速。
[0190]
在这种情况下,车辆1在变更车道后缓慢减速并停止,因此后续车能够保持富余地减速。
[0191]
图17是示例了车辆控制装置11在图2的步骤s112执行紧急自动掌舵模式,在接下来的步骤s113,使车辆1缓慢减速时的掌舵扭矩和制动液压的变化的时间图。
[0192]
在时刻t4完成障碍物的避让时,车辆控制装置11将在紧急自动掌舵模式下产生的
掌舵电动机的掌舵扭矩返回到零。另外,车辆控制装置11在时刻t4,使四轮的制动液压从紧急自动制动模式下的制动液压p0降低到用于使车辆1缓慢减速的规定压力p2(p0>p2>0)继续自动制动,使车辆1缓慢减速。
[0193]
图18是表示在车辆1不具有后置摄像头等第二外界识别设备10b时,换句话说,在车辆控制装置11不能判断有无后续车的系统中的、图2的流程图的步骤s113中的处理内容的流程图。
[0194]
图18的流程图的步骤s451~步骤s456的处理内容与图14的流程图的步骤s401~步骤s406相同,省略详细的说明。
[0195]
车辆控制装置11在步骤s455中判断为在车辆1在同一车道内不能避让开障碍物,通过向相邻的车道移动而避让了障碍物的情况下,进入步骤s457。
[0196]
车辆控制装置11在步骤s457中,与图14的流程图的步骤s409同样,解除紧急自动掌舵模式的掌舵控制。另外,车辆控制装置11在步骤s457中,使四轮的制动液压从紧急自动制动模式的制动液压p0降低到规定压力p2(p0>p2>0)继续自动制动,使车辆1缓慢减速(参照图17)。
[0197]
即,在车辆1不具备第二外界识别装置10b的情况下,车辆控制装置11在通过向相邻的车道移动而避让了障碍物时,无法判断有无后续车。
[0198]
因此,车辆控制装置11在为了避开障碍物而进行了车道变更的情况下,在存在后续车的情况下设置,使车辆1缓慢减速,使后续车能够有富余地减速。
[0199]
图19是表示图2的流程图的步骤s115中的处理内容的流程图,即,是通过执行制动力矩赋予模式来避让障碍物之后的处理内容的流程图。
[0200]
车辆控制装置11首先在步骤s501中判断障碍物的避让是否完成。
[0201]
而且,在障碍物的避让未完成的情况下,车辆控制装置11进入步骤s502以及步骤s503,通过继续紧急自动掌舵模式及制动力矩赋予模式而使车辆1沿着避让路径行驶。
[0202]
另一方面,在障碍物的避让完成了的情况下,车辆控制装置11进入步骤s504,判断车辆1的驾驶员是否进行了方向盘9及制动踏板等的驾驶操作。
[0203]
在驾驶员进行了驾驶操作的情况下,车辆控制装置11进入步骤s505,解除制动力矩赋予模式,取消使转弯外轮的制动力比转弯内轮的制动力低的处理。
[0204]
接着,车辆控制装置11进入步骤s506,通过解除紧急自动制动模式及紧急自动掌舵舵模式,使之恢复手动驾驶。
[0205]
也就是说,通过执行制动力矩赋予模式来避开障碍物,并且在具有驾驶员进行的驾驶操作的情况下,车辆控制装置11输出将转弯外轮和转弯内轮的制动液压均返回到零的控制指令(第四控制指令)。
[0206]
图20是示例车辆控制装置11在图2的步骤s114中执行紧急自动掌舵模式和制动力矩赋予模式,在接下来的步骤s115中,在避让完成后使其恢复手动驾驶时的掌舵扭矩和制动液压的变化的时间图。
[0207]
车辆控制装置11在时刻t1开始紧急自动制动模式时,首先使四轮制动液压预增压,然后在时刻t2增压至用于紧急停止的制动液压p0。
[0208]
在开始了紧急自动制动模式后的时刻t3,车辆控制装置11基于碰撞风险开始紧急自动掌舵模式,赋予用于使车辆1跟踪避让路径的掌舵扭矩。
[0209]
另外,车辆控制装置11在时刻t3基于对避让路径的跟踪性的判断开始制动力矩赋予模式,不从紧急自动掌舵模式下的制动液压p0变更转弯内轮的制动液压,使转弯外轮的制动液压从制动液压p0降低到与上述的第一变量α和第二变量β对应的制动液压p1。
[0210]
然后,车辆控制装置11在时刻t4,若判断车辆1避让了障碍物,则通过解除制动力矩赋予模式,使转弯外轮的制动压返回到紧急自动制动模式下的制动液压p0。
[0211]
另外,车辆控制装置11在时刻t5解除紧急自动制动模式及紧急自动掌舵模式,在时刻t5到时刻t6之间将紧急自动制动模式下的四轮的制动液压返回到零。另外,车辆控制装置11在时刻t5到时刻t6之间将在紧急自动掌舵模式下掌舵电动机发生的掌舵扭矩返回到零,使车辆1恢复到手动驾驶状态。
[0212]
车辆控制装置11在图19的流程图的步骤s504中判断为没有驾驶员的驾驶操作时,进入步骤s507,判断车辆1是否在同一车道内避让了障碍物。
[0213]
在此,在车辆1在同一车道内避让了障碍物的情况下,车辆控制装置11进入步骤s508解除制动力矩赋予模式。
[0214]
另外,车辆控制装置11进入步骤s509,解除紧急自动掌舵模式的掌舵控制,另外,在车辆1停止之前,使紧急自动制动模式的制动控制、即将四轮的制动液压保持在紧急自动制动模式下的制动液压p0的控制继续。
[0215]
在制动力矩赋予模式中,使转弯外轮的制动液压从紧急自动制动模式下的制动液压p0下降到与变量α、β对应的制动液压p1,然后车辆控制装置11在步骤s509中,使转弯外轮的制动液压从制动力矩赋予模式下的制动液压p1增大到紧急自动制动模式下的制动液压p0。
[0216]
即,车辆控制装置11在制动力矩赋予模式开始后,判断为车辆1在同一车道内避让了障碍物,并且在没有驾驶员的驾驶操作的情况下,输出用于增大转弯外轮的制动液压的控制指令(第五控制指令)。
[0217]
图21是示例车辆控制装置11在图2的步骤s114中执行紧急自动掌舵模式和制动力矩赋予模式,在接下来的步骤s115中,在避让完成后使紧急自动制动模式持续到停车时的掌舵扭矩和制动液压的变化的时间图。
[0218]
在时刻t4完成障碍物的避让后,车辆控制装置11使在紧急自动掌舵模式下掌舵电动机发生的掌舵扭矩在从时刻t4到时刻t5之间回到零。
[0219]
另外,若在时刻t4,完成障碍物的避让,则车辆控制装置11以规定速度
△
p将转弯外轮的制动液压从制动力矩赋予模式下的制动液压p1恢复到紧急自动制动模式下的制动液压p0,将转弯外轮及转弯内轮的制动液压保持在紧急自动制动模式下的制动液压p0,由此使车辆1急速减速并停止。
[0220]
车辆控制装置11在步骤s507中判断为车辆1在同一车道内不能避让障碍物,且通过向相邻的车道移动避让了障碍物的情况下,进入步骤s510。
[0221]
车辆控制装置11在步骤s510中,基于由第二外界识别装置10b取得的车辆后方的外界信息,判断在为了碰撞避让而移动的车道上在本车的后方是否有后续车。
[0222]
然后,在没有后续车的情况下,车辆控制装置11进入步骤s511,解除制动力矩赋予模式。
[0223]
另外,车辆控制装置11进入步骤s512,解除紧急自动掌舵模式的掌舵控制,并且,
在车辆1停止之前继续紧急自动制动模式的制动控制。
[0224]
另外,步骤s511和步骤s512中的处理内容与步骤s508和步骤s509中的处理内容相同,因此省略对步骤s511和步骤s512中的处理内容的详细说明。
[0225]
另外,车辆控制装置11实施步骤s511和步骤s512的处理时的制动液压和掌舵扭矩如图21的时间图那样地变化。
[0226]
另一方面,为了避开障碍物而进行车道变更,且在变更后的车道上有后续车时,如果本车紧急停止,则要求后续车紧急停止。
[0227]
因此,车辆控制装置11为了避开障碍物而进行车道变更,并且,在变更后的车道上有后续车的情况下,进入步骤s513。
[0228]
车辆控制装置11在步骤s513中解除制动力矩赋予模式。
[0229]
另外,车辆控制装置11进入步骤s514,解除紧急自动掌舵模式的掌舵控制,并且,使转弯外轮及转弯内轮的制动压变为用于使车辆1缓慢减速的规定压力p2(p0>p2>0)并保持在规定压力p2,由此使车辆1缓慢减速。
[0230]
在这种情况下,本车在车道变更后缓慢减速并停止,故而后续车可从容地减速。
[0231]
图22是示例车辆控制装置11在图2的步骤s114中执行紧急自动掌舵模式及制动力矩赋予模式,在接下来的步骤s115中,在避让完成后使车辆1缓慢减速时的掌舵扭矩及制动液压的变化的时间图。
[0232]
在时刻t4完成了障碍物的避让后,车辆控制装置11将在紧急自动掌舵模式下掌舵电动机产生的掌舵扭矩返回到零。
[0233]
另外,当在时刻t4完成了障碍物的避让时,车辆控制装置11使转弯内轮的制动液压在时刻t4到时刻t5之间从紧急自动制动模式下的制动液压p0降低到缓慢减速用的规定压力p2(p0>p2>0),进而使转弯外轮的制动液压以规定速度
△
p从基于制动力矩赋予模式的制动液压p1增加到所述规定压力p2,将左右轮的制动液压保持在规定压力p2,使车辆1缓慢减速。
[0234]
通过上述步骤s510~步骤s514的处理,车辆控制装置11在开始了制动力矩赋予模式之后,判断为车辆1通过向相邻的车道移动而避让障碍物,且没有车辆1的驾驶员进行的驾驶操作的情况下,如果在车辆1的后方不能确认其他车辆,则输出用于增加转弯外轮的制动力的控制指令(第六控制指令)。
[0235]
另外,车辆控制装置11在开始了制动力矩赋予模式后,判断为车辆1通过向相邻的车道移动而避让了障碍物,并且在没有车辆1的驾驶员进行的驾驶操作的情况下,在能够在车辆1的后方确认其他车辆时,输出用于增加转弯外轮的制动力且减少转弯内轮的制动力的控制指令(第七控制指令)。
[0236]
图23是表示在车辆1不具备后置摄像头等第二外界识别装置10b的情况下,换言之,车辆控制装置11无法判断有无后续车的系统中的图2的流程图的步骤s115中的处理内容的流程图。
[0237]
图23的流程图的步骤s511~步骤s557的处理内容与图19的流程图的步骤s501、步骤s504~步骤s509相同,省略详细的说明。
[0238]
另外,车辆控制装置11在步骤s551中判断为障碍物避让未完成的情况下,在不具备后置摄像头等第二外界识别装置10b的状态下,由于基于自动掌舵、制动力矩的横向移动
量的赋予导致自后方的碰撞风险增大,故而不进行相当于图19的步骤s502~s503的自动掌舵及控制力矩的处理。
[0239]
车辆控制装置11在步骤s555中判断为车辆1在同一车道内不能避让开障碍物,通过向相邻车道的移动而避让了障碍物ob的情况下,进入步骤s558。
[0240]
车辆控制装置11在步骤s558中解除制动力矩赋予模式。
[0241]
然后,车辆控制装置11进入步骤s559,解除基于紧急自动掌舵模式进行的掌舵控制,另外,通过使转弯外轮及转弯内轮的制动压转移到用于缓慢减速的规定压力p2(p0>p2>0)并保持在规定压力p2,由此使车辆1缓慢减速。
[0242]
即,在车辆1不具备第二外界识别装置10b的情况下,车辆控制装置11不能判断有无后续车辆。
[0243]
因此,车辆控制装置11在为了避让开障碍物而进行了车道变更的情况下,为了应对存在后续车的情况而设置,使车辆1缓慢减速并且使后续车能够从容地减速。
[0244]
在上述实施方式中说明的各技术思想只要不产生矛盾,就能够适合地组合使用。
[0245]
另外,虽然参照优选实施方式具体地说明了本发明的内容,但显然本领域技术人员根据本发明的基本技术思想和教导能够采用各种变形方式。
[0246]
例如,车辆控制装置11在车辆1的前方检测到障碍物时,基于此时已取得的路面摩擦系数μ的信息及/或绕过障碍物所需的横向移动量(交错率,overlap),能够变更紧急自动制动模式的开始定时。
[0247]
在此,车辆控制装置11在路面的摩擦系数μ越小时,就越提早紧急自动制动模式的开始定时,用于绕过障碍物所需的横向移动量越大时,就越能提早紧急自动制动模式的开始定时。
[0248]
另外,车辆控制装置11在避让了障碍物后使车辆1缓慢减速时,根据与后续车辆的相对速度及/或车间来调整缓慢减速用的制动液压p2,能够变更车辆1的减速度。
[0249]
即,车辆控制装置11在后续车接近本车为止的时间长的情况下使本车急减速,在后续车接近本车为止的时间短的情况下使本车缓慢减速。
[0250]
另外,车辆控制装置11在开始执行制动力矩赋予模式之后,判断为难以使车辆1跟踪避让路径的情况下,解除制动力矩赋予模式,能够使转弯外轮的制动压回到紧急自动制动模式下的制动液压p0。
[0251]
另外,车辆控制装置11可经由无线通信从外部获取关于路面的摩擦系数μ的信息,或者根据降雨、降雪、气温、湿度等信息来估计路面的摩擦系数μ。
[0252]
另外,车辆控制装置11能够在制动力矩赋予模式中增加转弯内轮的制动液压,并且减少转弯外轮的制动液压。
[0253]
另外,车辆控制装置11能够在制动力矩赋予模式中控制施加给后轮的制动力以锁定后轮并使之滑动。
[0254]
另外,车辆控制装置11即使在同一车道内能够避开障碍物的情况下,也能够根据有无后续车,选择使紧急自动制动模式继续或缓慢减速直至停车。
[0255]
另外,车辆控制装置11可通过脸识别或瞳孔检测等判断驾驶员是否处于正常进行驾驶动作(手动驾驶)的状态,并根据相关的判断结果变更避让了障碍物后的处理模式。
[0256]
例如,车辆控制装置11在驾驶员正常地进行驾驶动作的状态的情况下,或者驾驶
员正常地进行驾驶动作的状态且实际进行了驾驶动作的情况下,使其恢复为手动驾驶,除此以外能够根据有无车道变更或有无后续车来选择在停车之前继续紧急自动制动模式或缓慢减速。
[0257]
此外,在完成了障碍物的避让,并且,具有由驾驶员进行的驾驶操作,车辆控制装置11解除紧急自动制动模式和紧急自动掌舵模式时(参照图15),通过将制动液压返回零的定时和掌舵扭矩返回零的定时接近,能够减轻给驾驶员带来的不适感。
[0258]
但是,也可以使制动液压回到零的定时和掌舵扭矩回到零的定时不一致。
[0259]
另外,车辆控制装置11能够基于在紧急自动制动模式和紧急自动掌舵模式的碰撞避免动作中实际发生的横向加速度等车辆动作来判断是否执行制动力矩赋予模式。
[0260]
即,车辆控制装置11在没有产生为了碰撞避让而要求的横向加速度时,能够判断执行制动力矩赋予模式。
[0261]
另外,车辆控制装置11在通过紧急自动制动模式和紧急自动掌舵模式使车辆1跟踪避让路径时,基于车辆1相对于避让路径的横向偏移量的检测值等避让路径与实际行驶轨迹的偏差,能够判断是否执行制动力矩赋予模式。
[0262]
即,车辆控制装置11在产生了避让路径与实际的行驶轨迹的偏差时,能够判断执行制动力矩赋予模式。
[0263]
另外,本发明不限于上述的实施方式,包括各种变形例。例如,上述实施方式是为了容易理解本发明而详细说明的,不一定限定于具备所说明的全部结构的方式。另外,可将一实施方式的构成的一部分置换为其他实施方式的结构,并且也可以在某个实施方式的构成中追加其他实施方式的结构。另外,对于各实施方式的结构的一部分,可追加、删除、置换其他结构。
[0264]
本技术主张基于2109年9月27日提出申请的日本专利申请第2019-177003号的优先权。包含2019年9月27日申请的日本专利申请第2019-177003的说明书、权利要求书、附图和摘要的全部公开内容通过参照整体编入本技术中。
[0265]
附图标记说明
[0266]
1:车辆
[0267]
2l、2r、3l、3r:车轮(车轮部)
[0268]
4l、4r、5l、5r:轮缸
[0269]
6:轮缸液压控制装置(制动控制装置)
[0270]
7:车辆信息取得装置
[0271]
8:电动助力转向装置(掌舵控制装置)
[0272]
9:方向盘
[0273]
10a:第一外界识别装置(外界识别部)
[0274]
10b:第二外界识别装置(外界识别部)
[0275]
11:车辆控制装置
[0276]
11a:微型计算机(控制部)
[0277]
20:车辆控制系统
[0278]
21:液压式制动装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。