1.本发明涉及爆破工程技术领域,特别地,涉及一种爆堆块度识别方法及系统、电子设备、计算机可读取的存储介质。
背景技术:
2.在露天矿山爆破作业中,为实现矿石的高效率、高质量地开采需要较好的台阶爆破效果,爆破效果的好坏受到爆破现场的地形地质条件、岩石的力学特性、爆破参数、装药方式等多种因素的影响,而爆破效果的好坏最为直观的表现就是爆破后的爆堆块度大小及分布。爆堆块度是爆堆形态的微观组成,块度大小不仅直接影响推土机平整的岩土量、矿石运输效率和二次破碎等工作,而且影响到后续的选矿工艺生产及其经济效益,甚至涉及矿山工作人员的施工安全。因此,对爆堆块度进行快速、准确的识别,并将爆破块度作为结果导向对爆破设计的参数进行优化,对矿山施工的各个方面都有积极影响,是目前研究迫切需要解决的问题。
技术实现要素:
3.本发明提供了一种爆堆块度识别方法及系统、电子设备、计算机可读取的存储介质,实现了对爆堆块度的多角度、全方位智能化识别,并且可以反馈于爆破参数的优化。
4.根据本发明的一个方面,提供一种爆堆块度识别方法,包括以下内容:
5.获取爆堆块度评价模型和历史爆堆块度评价数据;
6.利用无人机搭载三维激光扫描仪对爆堆进行数据采集;
7.对采集的数据进行预处理;
8.基于预处理后的数据进行爆堆块度识别;
9.将爆堆块度识别结果输入爆堆块度评价模型,获得爆堆块度评价结果,并将得到爆堆块度评价结果与历史爆堆块度评价数据进行比对,根据比对结果获得爆破参数优化分析结果。
10.进一步地,所述方法还包括以下内容:
11.基于爆堆块度识别结果生成爆堆块度级配曲线,并对爆堆块度级配曲线和爆破参数优化分析结果进行可视化展示并存储。
12.进一步地,所述对采集的数据进行预处理的过程具体包括以下内容:
13.对采集的数据进行降噪处理;
14.采用随机采集一致滤波方法对降噪处理后的数据进行滤波处理;
15.采用kd-tree结构对滤波处理后的数据进行精简处理;
16.对精简处理后的数据通过narf法进行特征聚合。
17.进一步地,所述基于预处理后的数据进行爆堆块度识别的过程具体包括以下内容:
18.从预处理后的数据中提取出爆堆特征信息;
19.采用语义分割对提取的爆堆特征信息进行分割处理;
20.采用欧式聚类方法对分割处理后的爆堆特征信息进行聚类处理;
21.采用lda算法从聚类处理结果中提取出岩体块度大小识别结果。
22.进一步地,在所述利用无人机搭载三维激光扫描仪对爆堆进行数据采集的步骤之前还包括以下内容:
23.根据所述爆堆块度评价模型的需求数据和爆破现场情况获得无人机的起飞点,并对起飞点的安全性进行校验。
24.进一步地,所述对起飞点的安全性进行校验的过程具体为:
25.获得无人机和三维激光扫描仪的设备信息、起飞点处的图像集合;
26.根据所述设备信息获得无人机和三维激光扫描仪的危险特征集合;
27.基于所述危险特征集合对起飞点处的图像集合进行危险特征遍历,获得危险特征匹配结果;
28.基于所述危险特征匹配结果评估起飞点的安全性。
29.进一步地,所述危险特征集合包括危险特征和用于标识不同危险特征对应危险等级的标识信息。
30.另外,本发明的另一实施例还提供一种爆堆块度识别系统,包括:
31.模型获取模块,用于获取爆堆块度评价模型和历史爆堆块度评价数据;
32.数据获取模块,用于获取搭载三维激光扫描仪的无人机所采集的爆堆数据;
33.数据预处理模块,用于对采集的数据进行预处理;
34.爆堆块度识别模块,用于基于预处理后的数据进行爆堆块度识别;
35.爆破参数优化模块,用于将爆堆块度识别结果输入爆堆块度评价模型,获得爆堆块度评价结果,并将得到爆堆块度评价结果与历史爆堆块度评价数据进行比对,根据比对结果获得爆破参数优化分析结果。
36.另外,本发明的另一实施例还提供一种电子设备,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器通过调用所述存储器中存储的所述计算机程序,用于执行如上所述的方法的步骤。
37.另外,本发明的另一实施例还提供一种计算机可读取的存储介质,用于存储对爆堆块度进行识别的计算机程序,所述计算机程序在计算机上运行时执行如上所述的方法的步骤。
38.本发明具有以下效果:
39.本发明的爆堆块度识别方法,通过获取爆堆块度评价模型和历史爆堆块度评价数据,在采集完爆堆的数据并经过预处理后可以实现爆堆块度的智能化识别,且识别精度高,而且,还通过爆堆块度评价模型对此次爆堆块度识别结果进行自动评价,并将此次爆堆块度评价结果与历史爆堆块度评价数据进行比对,可以基于比对结果对此次的爆破参数进行优化分析,为爆破参数的持续优化设计提供了指导性建议。同时,采用无人机搭载三维激光扫描仪对爆堆进行数据采集,可以实现多角度全方位的自动化采集,确保了数据采集的可靠性和准确性,并且对光照条件无要求,在夜晚也可以进行作业,适用性好。
40.另外,本发明的爆堆块度识别系统同样具有上述优点。
41.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。
下面将参照图,对本发明作进一步详细的说明。
附图说明
42.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
43.图1是本发明优选实施例的爆堆块度识别方法的流程示意图。
44.图2是本发明另一实施例的爆堆块度识别方法的流程示意图。
45.图3是图2中步骤s12的子流程示意图。
46.图4是图1中步骤s3的子流程示意图。
47.图5是图1中步骤s4的子流程示意图。
48.图6是本发明又一实施例的爆堆块度识别方法的流程示意图。
49.图7是本发明另一实施例的爆堆块度识别系统的模块结构示意图。
具体实施方式
50.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
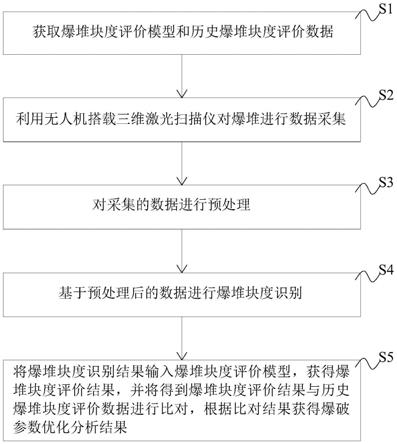
51.如图1所示,本发明的优选实施例提供一种爆堆块度识别方法,其特征在于,包括以下内容:
52.步骤s1:获取爆堆块度评价模型和历史爆堆块度评价数据;
53.步骤s2:利用无人机搭载三维激光扫描仪对爆堆进行数据采集;
54.步骤s3:对采集的数据进行预处理;
55.步骤s4:基于预处理后的数据进行爆堆块度识别;
56.步骤s5:将爆堆块度识别结果输入爆堆块度评价模型,获得爆堆块度评价结果,并将得到爆堆块度评价结果与历史爆堆块度评价数据进行比对,根据比对结果获得爆破参数优化分析结果。
57.可以理解,本实施例的爆堆块度识别方法,通过获取爆堆块度评价模型和历史爆堆块度评价数据,在采集完爆堆的数据并经过预处理后可以实现爆堆块度的智能化识别,且识别精度高,而且,还通过爆堆块度评价模型对此次爆堆块度识别结果进行自动评价,并将此次爆堆块度评价结果与历史爆堆块度评价数据进行比对,可以基于比对结果对此次的爆破参数进行优化分析,为爆破参数的持续优化设计提供了指导性建议。同时,采用无人机搭载三维激光扫描仪对爆堆进行数据采集,可以实现多角度全方位的自动化采集,确保了数据采集的可靠性和准确性,并且对光照条件无要求,在夜晚也可以进行作业,适用性好。
58.可以理解,在所述步骤s1中,所述爆堆块度评价模型是基于标准爆破效果要求的基础信息和专家评价系统进行各指标权重分析得到的,其中,所述基础信息包括爆堆的块度信息和爆堆形态信息等,块度信息包括大块率、原始级配信息,爆堆形态信息包括爆堆隆起高度、前抛距离、后冲距离等,其中,原始级配信息为爆破前的块度大小分布信息,为已知信息。另外,所述步骤s1中还获取了当次的爆破参数以及爆破现场的岩石硬度、起爆方式和装药结构,以便于后续进行爆破参数优化时,可以针对不同的爆破现场情况进行针对性优化,有利于提高爆破参数优化的合理性和科学性。其中,爆破参数具体包括延时时间、孔深、
孔径、孔距、排距、台阶高度等。
59.可选地,如图2所示,在本发明的另一实施例中,所述爆堆块度识别方法在所述步骤s2之前还包括以下内容:
60.步骤s12:根据所述爆堆块度评价模型的需求数据和爆破现场情况获得无人机的起飞点,并对起飞点的安全性进行校验。
61.可以理解,为了保证无人机的飞行安全,在根据爆堆块度评价模型的需求数据和爆破现场情况获得起飞点后,需要对起飞点的安全性进行校验,防止无人机坠落或撞击受损,若安全性校验通过,则将该起飞点作为无人机的数据采集路径起点,若安全性校验不通过,则需要根据现场情况调整起飞点,再进行安全性校验。
62.其中,如图3所示,所述步骤s12中对起飞点的安全性进行校验的过程具体为:
63.步骤s121:获得无人机和三维激光扫描仪的设备信息、起飞点处的图像集合;
64.步骤s122:根据所述设备信息获得无人机和三维激光扫描仪的危险特征集合;
65.步骤s123:基于所述危险特征集合对起飞点处的图像集合进行危险特征遍历,获得危险特征匹配结果;
66.步骤s124:基于所述危险特征匹配结果评估起飞点的安全性。
67.具体地,先获得无人机的类型、三维激光扫描仪的型号和测距等设备信息,以及在起飞点处利用三维激光扫描仪扫描得到一系列的图像。然后,根据无人机的类型、三维激光扫描仪的型号和测距等设备信息获得其危险特征集合,其中,所述危险特征集合包括危险特征和用于标识不同危险特征对应危险等级的标识信息。例如,危险特征包括存在障碍物、存在磁场干扰、存在浓云/浓雾等,而标识信息则根据不同的危险特征对设备起飞和测量所造成的不同影响程度进行等级划分,例如,障碍物的影响程度较大,其对应的等级就较高,存在磁场干扰的影响程度较小,其对应的等级相对就较低,具体的等级划分标准可以根据实际需要进行设定,在此不做具体限定。然后,利用危险特征集合在起飞点的一系列图像中进行危险特征遍历,即进行逐一的危险特征比对识别,可以得到危险特征匹配度,匹配度越高,意味着起飞点的图像中对应特征与危险特征的相似度越高,则危险程度越高。最后,将危险特征匹配度与预设的安全标准进行比对,如果超过安全标准,则判定该起飞点的安全性校验不通过,需要重新选择起飞点,若未超过安全标准,则判定该起飞点的安全性校验通过。可选地,还可以根据危险特征匹配度和标识信息计算得到一个危险特征系数,危险特征系数的值越大,风险程度越高,将计算得到的危险特征系数与预设的安全系数进行比对,如果小于安全系数,则意味着起飞点安全,否则意味着起飞点不安全。通过对无人机起飞点的安全性进行校验,可以获得安全性有保障的起飞点,能够达到数据安全采集和保障设备安全的效果,提高数据采集的可操作性、科学性和安全性。
68.可以理解,在所述步骤s2中,所述爆堆可以是任一矿山爆破作业后形成的。所述三维激光扫描仪是通过激光测距原理(包括脉冲激光和相位激光),瞬时测得空间三维坐标值的测量仪器,利用三维激光扫描技术获取的空间点云数据,可快速便捷地实现对结构复杂、不规则的爆堆场景建立三维可视化。其中,采集的数据具体包括爆堆内所有点的点云坐标、目标位置与采集点的距离、横向扫描角度和纵向扫描角度等。具体地,每个点的点云坐标通过以下公式计算得到:
[0069][0070]
其中,x,y,z表示点云坐标值,l表示测量时爆堆与三维激光扫描仪之间的距离值,θ表示测量时激光脉冲的横向扫描角度观测值,ξ表示测量时激光脉冲的纵向扫描角度观测值。三维激光扫描仪的激光发射器发出激光脉冲信号,经爆堆表面漫反射后,沿相同的路径反射传回到接收器,可以计算得到爆堆与三维激光扫描仪的距离l,并控制编码器同步测量每个激光脉冲的横向扫描角度观测值θ和纵向扫描角度观测值ζ,从而可以在复杂的现场和空间对爆堆进行快速扫描测量,准确获得爆堆内所有点的点云坐标,再现爆堆的完整形态。由于三维激光扫描仪在扫描过程中存在盲区,因此采用无人机搭载三维激光扫描仪的方式能够对爆堆进行多角度全方位的扫描,获得丰富的数据资料,提升了数据资料的准确性,且对光照条件无要求,夜晚也能进行作业。
[0071]
可以理解,如图4所示,所述步骤s3具体包括以下内容:
[0072]
步骤s31:对采集的数据进行降噪处理;
[0073]
步骤s32:采用随机采集一致滤波方法对降噪处理后的数据进行滤波处理;
[0074]
步骤s33:采用kd-tree结构对滤波处理后的数据进行精简处理;
[0075]
步骤s34:对精简处理后的数据通过narf法进行特征聚合。
[0076]
具体地,在三维激光扫描仪进行数据采集的过程中,由于外界一些偶然因素而导致形成点云数据的噪音点,例如空中漂浮的粉尘、飞虫、移动的人员、机械、植被等在三维激光扫描仪与爆堆间出现,将造成噪音数据的生成,因此,需要对采集的数据进行降噪处理,以降低这些噪声数据带来的干扰。降噪的目的在于突出信号本身而抑制噪声影响,例如给信号一个高的权重而给噪声一个低的权重,从而进行降噪处理。然后,对降噪处理后的数据进行滤波处理,采集的点云数据包括几何位置、颜色信息、强度信息,颜色信息是将对应位置像素的颜色信息赋予到点云中对应的点,强度信息是采集到的回波强度赋予到点云中对应的点,强度信息与目标的表面材质、粗糙度、入射角方向,以及仪器的发射能量、激光波长有关,通过随机采样一致滤波方法对降噪后的点云数据进行滤波处理,可以有效地过滤掉无序点云。但是,在经过滤波处理后,点云数据中依然会有较多的重叠点云存在,因此,再采用kd-tree结构精简法对点云数据进行精简处理。而精简后的点云数据呈块状,且杂乱无章,再通过narf(normal aligned radial feature法线对齐径向特征)法对点云数据进行特征聚合处理,使得爆堆被完整地还原出来。经过对三维激光扫描仪采集的点云数据进行降噪、过滤、精简和聚合处理后,能够得到清晰、完整的爆堆的三维点云数据,为后续的爆堆块度识别奠定了基础。
[0077]
可以理解,如图5所示,所述步骤s4具体包括以下内容:
[0078]
步骤s41:从预处理后的数据中提取出爆堆特征信息;
[0079]
步骤s42:采用语义分割对提取的爆堆特征信息进行分割处理;
[0080]
步骤s43:采用欧式聚类方法对分割处理后的爆堆特征信息进行聚类处理;
[0081]
步骤s44:采用lda算法从聚类处理结果中提取出岩体块度大小识别结果。
[0082]
具体地,利用三维激光扫描仪的起飞点为坐标原点构建三维直角坐标系,通过上述公式1可以计算得到爆堆所有点的空间坐标,从而可以得到爆堆隆起高度、前抛距离、后
冲距离等爆堆特征信息。然后,选择基于离散方法的语义分割对提取的爆堆特征信息进行分割处理,例如采用全卷积神经网络从所有点云数据中分层提取不同层次的几何关系,然后使用3d卷积和加权平均来提取特征及合并远程依赖关系,其处理过程大致为提取特征-特征映射-特征图压缩(降维)-全连接-分类。再利用点云中点与点之间的欧式距离进行聚类,当点与点之间的欧式距离小于设定的阈值则视为一类,采用欧式聚类方法可以有效地剔除掉过小的块度。然后,采用有监督的线性降维算法,通过线性投影将高维的数据映射到低维的空间中表示,从而使得降维后的数据点尽可能地容易被区分,从而可以准确地识别出爆堆的岩体块度大小。
[0083]
可以理解,在所述步骤s5中,将之前获得的爆堆隆起高度、前抛距离、后冲距离等输入爆堆块度评价模型,同时基于爆堆块度识别结果可以计算得到大块率,将大块率也输入爆堆块度评价模型,所述爆堆块度评价模型可自动输出本次爆破的爆堆块度评价结果。然后,将此次爆堆块度评价结果与历史爆堆块度评价数据进行比对分析,可以了解本次爆破效果与标准爆破效果的差距,从而可以获得此次爆破参数的优化分析结果,为爆破参数的持续优化设计提供了指导性建议。另外,在进行评价时,还可以结合爆破现场的岩石硬度、起爆方式和装药结构等参数选择相同或相似参数的历史数据进行比对,有利于提高爆破参数优化的准确性。
[0084]
可选地,如图6所示,在本发明的另一实施例中,所述爆堆块度识别方法还包括以下内容:
[0085]
步骤s6:基于爆堆块度识别结果生成爆堆块度级配曲线,并对爆堆块度级配曲线和爆破参数优化分析结果进行可视化展示并存储。
[0086]
具体地,将经过lda算法提取的岩体块度大小通过origin等绘图软件生成爆堆块度级配曲线,即爆堆块度大小分布曲线,并将爆堆块度级配曲线和爆破参数优化分析结果进行可视化展示并存储,便于对下次爆破进行参考,也便于工作人员进行管理。
[0087]
另外,如图7所示,本发明的另一实施例还提供一种爆堆块度识别系统,优选采用上述实施例的方法,所述系统包括:
[0088]
模型获取模块,用于获取爆堆块度评价模型和历史爆堆块度评价数据;
[0089]
数据获取模块,用于获取搭载三维激光扫描仪的无人机所采集的爆堆数据;
[0090]
数据预处理模块,用于对采集的数据进行预处理;
[0091]
爆堆块度识别模块,用于基于预处理后的数据进行爆堆块度识别;
[0092]
爆破参数优化模块,用于将爆堆块度识别结果输入爆堆块度评价模型,获得爆堆块度评价结果,并将得到爆堆块度评价结果与历史爆堆块度评价数据进行比对,根据比对结果获得爆破参数优化分析结果。
[0093]
可以理解,本实施例的爆堆块度识别系统,通过获取爆堆块度评价模型和历史爆堆块度评价数据,在采集完爆堆的数据并经过预处理后可以实现爆堆块度的智能化识别,且识别精度高,而且,还通过爆堆块度评价模型对此次爆堆块度识别结果进行自动评价,并将此次爆堆块度评价结果与历史爆堆块度评价数据进行比对,可以基于比对结果对此次的爆破参数进行优化分析,为爆破参数的持续优化设计提供了指导性建议。同时,采用无人机搭载三维激光扫描仪对爆堆进行数据采集,可以实现多角度全方位的自动化采集,确保了数据采集的可靠性和准确性,并且对光照条件无要求,在夜晚也可以进行作业,适用性好。
[0094]
另外,所述爆堆块度识别系统还包括起飞点设定模块,用于根据所述爆堆块度评价模型的需求数据和爆破现场情况获得无人机的起飞点,并对起飞点的安全性进行校验。
[0095]
其中,所述起飞点设定模块包括:
[0096]
信息获取单元,用于获得无人机和三维激光扫描仪的设备信息、起飞点处的图像集合;
[0097]
危险特征获取单元,用于根据所述设备信息获得无人机和三维激光扫描仪的危险特征集合;
[0098]
危险特征匹配单元,用于基于所述危险特征集合对起飞点处的图像集合进行危险特征遍历,获得危险特征匹配结果;
[0099]
安全性评估单元,用于基于所述危险特征匹配结果评估起飞点的安全性。
[0100]
另外,所述数据预处理模块包括:
[0101]
数据降噪单元,用于对采集的数据进行降噪处理;
[0102]
数据滤波单元,用于采用随机采集一致滤波方法对降噪处理后的数据进行滤波处理;
[0103]
数据精简单元,用于采用kd-tree结构对滤波处理后的数据进行精简处理;
[0104]
特征聚合单元,用于对精简处理后的数据通过narf法进行特征聚合。
[0105]
另外,所述爆堆块度识别模块包括:
[0106]
特征信息提取单元,用于从预处理后的数据中提取出爆堆特征信息;
[0107]
分割单元,用于采用语义分割对提取的爆堆特征信息进行分割处理;
[0108]
聚类单元,用于采用欧式聚类方法对分割处理后的爆堆特征信息进行聚类处理;
[0109]
岩体块度识别单元,用于采用lda算法从聚类处理结果中提取出岩体块度大小识别结果。
[0110]
可选地,所述爆堆块度识别系统还包括可视化展示模块,用于基于爆堆块度识别结果生成爆堆块度级配曲线,并对爆堆块度级配曲线和爆破参数优化分析结果进行可视化展示并存储。
[0111]
可以理解,本实施例的系统中的各个模块和单元分别与上述方法实施例的各个步骤相对应,故各个模块和单元的工作过程在此不再赘述,参考上述方法实施例即可。
[0112]
另外,本发明的另一实施例还提供一种电子设备,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器通过调用所述存储器中存储的所述计算机程序,用于执行如上所述的方法的步骤。
[0113]
另外,本发明的另一实施例还提供一种计算机可读取的存储介质,用于存储对爆堆块度进行识别的计算机程序,所述计算机程序在计算机上运行时执行如上所述的方法的步骤。
[0114]
一般计算机可读取存储介质的形式包括:软盘(floppy disk)、可挠性盘片(flexible disk)、硬盘、磁带、任何其与的磁性介质、cd-rom、任何其余的光学介质、打孔卡片(punch cards)、纸带(paper tape)、任何其余的带有洞的图案的物理介质、随机存取存储器(ram)、可编程只读存储器(prom)、可抹除可编程只读存储器(eprom)、快闪可抹除可编程只读存储器(flash-eprom)、其余任何存储器芯片或卡匣、或任何其余可让计算机读取的介质。指令可进一步被一传输介质所传送或接收。传输介质这一术语可包含任何有形或无
形的介质,其可用来存储、编码或承载用来给机器执行的指令,并且包含数字或模拟通信信号或其与促进上述指令的通信的无形介质。传输介质包含同轴电缆、铜线以及光纤,其包含了用来传输一计算机数据信号的总线的导线。
[0115]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。