技术特征:
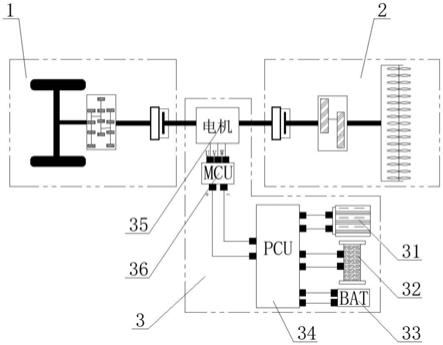
1.一种油电混合双增程式电动拖拉机,包括行走系统(1)、作业系统(2)和动力系统(3),所述动力系统(3)分别给行走系统(1)和作业系统(2)提供动力;其特征在于:所述动力系统(3)包括燃油发电系统(31)、燃料电池发电系统(32)、电池(33)、能量管理控制器(34)、驱动电机(35)和电机控制器(36);所述燃油发电系统(31)、燃料电池发电系统(32)和电池(33)相互并联接入能量管理控制器(34);所述能量管理控制器(34)通过电机控制器(36)给驱动电机(35)供电。2.根据权利要求1所述的油电混合双增程式电动拖拉机,其特征在于:所述燃料电池发电系统(32)与驱动电机(35)之间设有散热管理系统(4),所述散热管理系统(4)包括燃料电池冷却回路(41)和电机冷却回路(42)和散热控制器(43);所述燃料电池冷却回路(41)包括燃料电池水箱(411)、燃料电池水泵(412)、燃料电池中冷器(413)、燃料电池冷却风扇(414)、燃料电池内部温度传感器(415)和燃料电池水箱温度传感器(416),所述燃料电池水泵(412)从燃料电池水箱(411)抽取冷却水经过燃料电池发电系统(32)进行热交换,完成热交换的冷却水再经过燃料电池中冷器(413)返回燃料电池水箱(411),所述燃料电池冷却风扇(414)对燃料电池中冷器(413)进行冷却处理,所述燃料电池内部温度传感器(415)安装在燃料电池发电系统(32)的燃料电池内,所述燃料电池水箱温度传感器(416)安装在燃料电池水箱(411)内,所述燃料电池冷却风扇(414)、燃料电池内部温度传感器(415)和燃料电池水箱温度传感器(416)分别与散热控制器(43)连接;所述电机冷却回路(42)包括电机水箱(421)、电机水泵(422)、电机中冷器(423)、电机冷却风扇(424),所述电机水泵(422)从电机水箱(421)抽取冷却水对驱动电机(35)进行冷却,经过驱动电机(35)冷却水再经过电机中冷器(423)返回电机水箱(421),电机冷却风扇(424)对电机中冷器(423)进行冷却处理,驱动电机(35)与电机中冷器(423)之间的回水管路上关联有旁通管(425),所述旁通管(425)经过燃料电池水箱(411),所述旁通管(425)与燃料电池水箱(411)进行热交换,所述旁通管(425)进水口和出水口分别设有流量分配阀(426)和单向阀(427),所述驱动电机(35)内设有电机温度传感器(428),所述电机冷却风扇(424)、流量分配阀(426)和电机温度传感器(428)分别与散热控制器(43)连接。3.根据权利要求2所述的油电混合双增程式电动拖拉机的控制方法,其特征在于:根据工况不同分为电池驱动模式、发动机驱动模式和燃料电池驱动模式;电池驱动模式:当电池(33)电量充足时由电池(33)单独给驱动电机(35)供电;发动机驱动模式:当电池(33)的soc<60%,并且在户外作业时,燃油发电系统(31)给驱动电机(35)供电,同时给电池(33)充电;燃料电池驱动模式:当电池(33)的soc<60%,并且在封闭环境时,燃料电池发电系统(32)给驱动电机(35)供电,同时给电池(33)充电。4.根据权利要求3所述的油电混合双增程式电动拖拉机的控制方法,其特征在于,所述燃料电池驱动模式的控制方法如下:步骤一、读取燃料电池发电系统(32)和电池(33)上一秒的输出功率分别记为p
fcl
和p
batl
,估算并读取电池(33)当前时刻的soc状态,计算电池(33)历史输出功率的平均值记为p
ave
;步骤二、根据电池(33)的soc状态决定燃料电池发电系统(32)的工作状态,若电池(33)的soc状态为15%<soc≤60%,则燃料电池发电系统(32)进入增程状态;若电池(33)的soc
状态为0<soc≤15%,则燃料电池发电系统(32)进入快充状态;步骤三、当燃料电池发电系统(32)处于快充状态时,燃料电池发电系统(32)将以最大功率值p
fcmax
输出,一方面满足拖拉机作业及行走的功率需求,多余的电能给电池(33)充电,该状态下电池(33)不对外输出电能;步骤四、当燃料电池发电系统(32)处于增程状态时,电池(33)对外输出电能,也吸收燃料电池发电系统(32)释放的多余电能;拖拉机制动时,燃料电池发电系统(32)不停机而是维持上一秒的输出功率p
fcl
继续输出电能,该部分电能除了满足拖拉机基本电能需求外,多余的电能给电池(33)充电;拖拉机驱动时,通过效用函数来决定燃料电池发电系统(32)和电池(33)的输出功率,具体为燃料电池发电系统(32)输出功率变化越小,且维持在其最高效率点附近,其效用函数值越大;当电池(33)输出功率变化值越小,且越接近其历史平均功率时,其效用函数越大;燃料电池发电系统(32)和电池(33)的效用函数如下:3)的效用函数如下:式中,u
fc
为燃料电池发电系统(32)总效用函数;u
eco
为燃料电池发电系统(32)考虑经济性的效用函数;u
dua
为燃料电池发电系统(32)考虑耐久性的效用函数;p
fc
为燃料电池发电系统(32)目标输出功率;ω
eco
、ω
dua
为权重系数;p
fctop
、p
fcl
、p
fcmax
、p
maxdif
分别为燃料电池发电系统(32)最高效率点的输出功率、上一秒的输出功率、最大可输出功率以及燃料电池功率最大变化率;c、d为系数用于约束u
eco
和u
dua
小于等于0;u
bat
为电池(33)总效用函数;u
ave
为电池(33)考虑输出功率偏离平均功率的效用函数;u
dif
为电池(33)考虑功率波动的效用函数;p
bat
为电池(33)目标输出功率;ω
ave
、ω
dif
为权重系数;p
ave
、p
batl
、p
batmax
分别为电池(33)历史平均输出功率、上一秒的输出功率以及最大可输出功率;a、b为系数用于约束u
ave
和u
dif
小于等于0;当燃料电池发电系统(32)、电池(33)效用函数最大时,燃料电池以及电池的经济型和耐久性得到最大程度保障;燃料电池发电系统(32)和电池(33)效用函数最大化形式如下:
采用加权和方法将该双目标函数最大化问题转化为单目标函数最小化问题,新目标函数改下为如下:min f(p
fc
,p
bat
)=-w
eco
·
u
eco-w
dua
·
u
dua-w
ave
·
u
ave-w
dif
·
u
dif
燃料电池发电系统(32)和电池(33)还需满足权重系数和为1,燃料电池发电系统(32)输出功率与电池(33)输出功率之和等于整车需求功率p
dem
,且燃料电池发电系统(32)和电池(33)输出功率都在其自身最大范围内:利用kkt条件(karush-kuhn-tucker conditions)和拉格朗日乘子法(lagrange multiplier)将等式约束和目标函数组合成为新函数,最终形式如下:l(p
fc
,p
bat
)=-w
eco
·
u
eco-w
dua
·
u
dua-w
ave
·
u
ave-w
dif
·
u
dif
h(p
fc
p
bat-p
dem
)令:令:令:联立上式可得极值点:p
bat
=p
dem-p
fc
上式中除了ω
eco
、ω
dua
、ω
ave
、ω
dif
、p
bat
、p
fc
外其他均可视为常数,只要确定这四个权重系数即可确定燃料电池发电系统(32)和电池(33)最终目标输出功率p
fc
和p
bat
。5.根据权利要求4所述的油电混合双增程式电动拖拉机的控制方法,其特征在于,所述四个权重系数采用了离线仿真迭代寻优的方法确定权重值,主要方法如下:构造多目标优化函数如下:min g(k)={-s,d
fc
,d
bat
}式中,s为一次补充能源车辆最远行驶距离,d
fc
为燃料电池发电系统(32)性能衰退百分比,d
bat
为电池(33)性能衰退百分比;采用人工粒子群算法与pareto解集相结合,通过迭代仿真获得ω
eco
、ω
dua
、ω
ave
、ω
dif
的最优解,具体流程如下:步骤1.建立整车仿真模型,选择仿真工况,初始化算法参数如:优化对象ω
eco
、ω
dua
、ω
ave
、ω
dif
,迭代次数,种群数量;
步骤2.将ω
eco
、ω
dua
、ω
ave
、ω
dif
代入整车仿真模型,计算适应度值:-s、d
fc
、d
bat
,并保存记录;步骤3.与历史适应度记录相对比,根据pareto解集原理判断适应度是否存在支配情况,若是,用新适应度取代被支配的适应度后进入步骤4;若否,直接进入步骤4;步骤4.根据粒子群算法逻辑更新ω
eco
、ω
dua
、ω
ave
、ω
dif
;步骤5.判断是否满足终止条件,若是进入步骤6;若否,返回步骤2;步骤6.输出ω
eco
、ω
dua
、ω
ave
、ω
dif
的最优解。6.根据权利要求3所述的油电混合双增程式电动拖拉机的控制方法,其特征在于,所述发动机驱动模式的控制方法如下:采用恒温控制策略,燃油发电系统(31)根据电池(33)的soc值来决定是否工作;当电池soc<60%时燃油发电系统(31)启动,柴油机带动发电机发电,当拖拉机需求功率大于燃油发电系统(31)输出功率时,电池(33)与燃油发电系统(31)一起给拖拉机提供电能;当拖拉机需求功率小于等于燃油发电系统(31)时,燃油发电系统(31)输出的电能一部分输出给拖拉机满足其作业的功率需求,多余的部分给电池(33)充电使电池soc快速上升至90%,当电池soc≥90%时燃油发电系统(31)关闭,由电池(33)给拖拉机单独供电;所述燃油发电系统(31)一直工作将稳定工作在柴油机的高效区。7.根据权利要求3所述的油电混合双增程式电动拖拉机的控制方法,其特征在于,所述散热管理系统(4)的控制方法如下:所述散热控制器(43)接收燃料电池内部温度传感器(415)测量的燃料电池发电系统(32)工作温度,当燃料电池发电系统(32)工作温度大于其最佳工作温度时,散热控制器(43)控制燃料电池冷却风扇(414)开启给燃料电池冷却水进行快速降温;所述散热控制器(43)接收电机温度传感器(428)测量的驱动电机(35)工作温度,当燃料电池发电系统(32)工作温度大于其最佳工作温度时,散热控制器(43)控制电机冷却风扇(424)开启给电机冷却水进行快速降温;当燃料电池发电系统(32)工作温度小于等于其最佳工作温度时,散热控制器(43)控制电机冷却风扇(424)关闭;所述流量分配阀(426)用于实时分配进入燃料电池水箱(411)中电机冷却水的流量,燃料电池水箱温度传感器(416)测量燃料电池冷却水温度,当电池60%≤soc≤65%时,散热控制器(43)控制燃料电池水泵(412)开启,将燃料电池冷却水在燃料电池发电系统(32)内循环流动从而实现对燃料电池发电系统(32)的快速预热,并且通过pi控制算法实现氢燃料电池预热精确控温;当电池容量soc<60%,氢燃料电池完成预热并直接启动。8.根据权利要求7所述的油电混合双增程式电动拖拉机的控制方法,其特征在于,所述pi控制算法控制流量阀的开度的控制方法为:燃料电池水箱温度传感器(416)测量实际温度值为tep℃,目标温度为t
aim
℃,pi控制输入为温度偏差(可正可负):e(t)=t
aim-t
ep
(℃),当前冷却液比例调节阀开度为k(λ),k(λ)∈[0,100%];pi控制输出为流量阀的实时开度增量(可正可负)u(t),u(t)∈[0,100%];流量阀的目标开度为k(λ) u(t),并且满足约束:100%≥k(λ) u(t)≥0;u(t)具体为:其中k
p
,t
i
为待确定的比例、积分系数;当电池soc<60%时,燃料电池发电系统(32)冷启
动结束开始正常工作时,流量分配阀(426)关闭电机冷却水进入燃料电池水箱(411)的通道,电机冷却水将无法与燃料电池冷却水进行热交换。
技术总结
本发明公开了一种油电混合双增程式电动拖拉机及控制方法,包括行走系统、作业系统和动力系统,动力系统分别给行走系统和作业系统提供动力;动力系统包括燃油发电系统、燃料电池发电系统、电池、能量管理控制器、驱动电机和电机控制器;所述燃油发电系统、燃料电池发电系统和电池相互并联接入能量管理控制器;所述能量管理控制器通过电机控制器给驱动电机供电。有益效果:本发明可以提升拖拉机持续作业时间,采用燃料电池发电系统可以满足大棚作业的需求,采用燃油发电系统可以有效提升燃油效率并降低污染物排放;通过能量管理策略可以提升电池和燃料电池的使用寿命;通过散热管理系统可以有效降低燃料电池冷启动时间,减少燃料电池辅件能耗。电池辅件能耗。电池辅件能耗。
技术研发人员:孙闫 尹必峰 夏长高 贾和坤 顾浩 解玄
受保护的技术使用者:江苏大学
技术研发日:2021.12.02
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。