1.本发明属于高超声速飞行器通讯技术领域,尤其涉及一种探针的位置标定方法、系统、存储介质、设备及应用,具体公开了一种等离子体风洞探针位置标定的方法。
背景技术:
2.目前,飞行器以高超声速返回地球时,温度高达几千甚至上万度,高温导致了空气分子的振动激发、离解、甚至电离,从而在飞行器周围形成了一个等离子体鞘层。等离子体鞘层中存在一定量的自由电子,会吸收,反射和散射电磁波,使得通信系统失灵,产生“黑障”现象。
3.西安电子科技大学为了研究等离子体与电磁波的相互作用,建立了临近高超声速目标等离子体电磁科学实验装置。临近高超声速目标等离子体电磁科学实验装置可以产生高密度等离子体并长时间工作,它使用icp加热形成大体积等离子体射流,气体流量为0-30g/s和功率为0-0.5mw。
4.传统的等离子体参数诊断手段一般有微波诊断,激光诊断,光谱诊断,静电探针诊断等。相较于前两种诊断技术所需大型设备,光学窗口等。静电探针因其结构简单,诊断数据多样而受到广泛关注。微波诊断、光谱诊断和激光诊断等诊断手段只能得到等离子体电子密度的线积分值。而静电探针可以实现测量实验装置等离子体参数的空间位置。
5.但是现有技术中的等离子体风洞探针诊断位置不明确,如何将探针当前位置与测量等离子体参数结合起来成了一个新得挑战。
6.解决以上问题及缺陷的难度及意义为:通过上述分析,现有技术存在的问题及缺陷为:现有技术中的等离子体风洞探针诊断位置不明确,无法将探针当前位置与测量等离子体参数进行结合,无法准确了解等离子体内部参数随距离的变化过程,会影响后续研究电磁波与等离子体相互作用
技术实现要素:
7.针对现有技术存在的问题,本发明提供了一种探针的位置标定方法、系统、存储介质、设备及应用。
8.本发明是这样实现的,一种探针的位置标定方法包括:
9.步骤一,通过限位器得到导轨位置的脉冲信号;
10.步骤二,通过采集卡的采样率,构建通过导轨系统的加速度与速度,构建时间与位置对应的的序列;
11.步骤三,建立探针诊断数据与等离子体风洞的位置关系,分析等离子体风洞的参数变化情况。
12.进一步,所述探针的位置标定方法具体包括:
13.(1)选择激光水平仪作为校准源,通过激光水平仪放置在导轨上,移动导轨使得激光水平仪的激光与锥台的中心处重合,并记录导轨的位置d1;
14.(2)将两个限位器、探针数据采集连接至采集卡,设置导轨的加速度a1和速度为v1;
15.(3)实验阶段,探针从起始运动到尾端,并利用相同的采集频率(f)记录数据,得到探针数据序列[a1,a2,...,an]和限位器数据序列[b1,b2,...,bn];
[0016]
(4)从限位器数据序列中找出限位器脉冲信号chg1;
[0017]
(5)根据数据序列长度n与采集频率计算出采集时间t;
[0018]
(6)根据加速度与速度计算出加速阶段的时间t
11
和减速阶段的时间t
12
,其中t1=t2;
[0019]
(7)根据时间间隔为1/f,构造与数据序列同长度的时间序列t=[t1,t2,...,tn];
[0020]
(8)根据加速度运动与匀速运动构造距离序列,其中:
[0021]
当t≤t
11
时,
[0022]
当t
11
≤t≤t
12
时,x
12
=x
11
v1(t-t
11
);
[0023]
当t
12
≤t时,
[0024]
最后构造出距离序列x=[x1,x2,...,xn];
[0025]
(9)根据x≤chg1,找到触发位置对应的最小索引值temp;
[0026]
(10)根据喷管的直径d,边缘位置为x
b1
=d1-d/2和x
b2
=d1 d/2;
[0027]
(11)寻找边缘位置索引值的temp1和temp2,对应采集数据的索引值为tpos1=chg1-(temp-temp1)和tpos2=chg1-(temp1-temp)以及位置信息x=[x
b1
:x
b2
]。
[0028]
进一步,步骤(1)中,所述激光水平仪的激光与锥台的中心处重合时的误差取决于激光水平仪的激光光线的直径。
[0029]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述探针的位置标定方法的步骤。
[0030]
本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述探针的位置标定方法的步骤。
[0031]
本发明的另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现所述探针的位置标定方法的步骤。
[0032]
本发明的另一目的在于提供一种探针的位置标定系统,所述探针的位置标定系统包括:
[0033]
信号采集模块,用于通过限位器得到导轨位置的脉冲信号;
[0034]
校准模块,用于激光水平仪进行位置校准;
[0035]
导轨模块,用于通过导轨对限位器、激光水平仪和探针进行支撑;
[0036]
数据分析模块,用于通过处理器对采集信号进行处理分析。
[0037]
本发明的另一目的在于提供一种所述的探针的位置标定方法在高超声速飞行器中的应用。
[0038]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明通过基于激光水平仪,探针导轨的速度与加速度,建立数学关系,从而建立探针诊断数据与等离子体风洞的位置关系,分析等离子体风洞的参数变化情况,能够确定等离子体风洞探针诊断位
置,将探针当前位置与测量等离子体参数进行结合。
附图说明
[0039]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0040]
图1是本发明实施例提供的探针的位置标定方法流程图。
[0041]
图2是本发明实施例提供的探针的位置标定系统的原理图。
[0042]
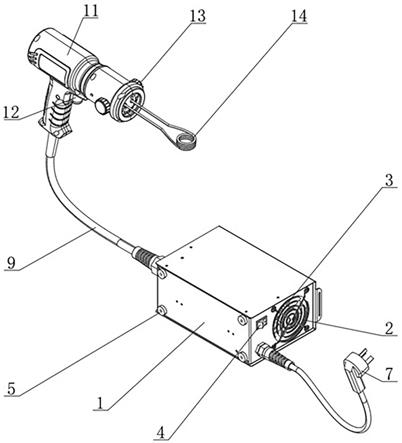
图中:1、导轨;2、限位器;3、探针;4、锥台。
[0043]
图3是本发明实施例提供的探针在科学实验装置的示意图。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0045]
针对现有技术存在的问题,本发明提供了一种探针的位置标定方法、系统、存储介质、设备及应用,下面结合附图对本发明作详细的描述。
[0046]
如图1所示,本发明实施例提供的探针的位置标定方法包括:
[0047]
s101,通过限位器得到导轨位置的脉冲信号;
[0048]
s102,通过采集卡的采样率,构建通过导轨系统的加速度与速度,构建时间与位置对应的序列;
[0049]
s103,建立探针诊断数据与等离子体风洞的位置关系,分析等离子体风洞的参数变化情况。
[0050]
下面结合具体实施例对本发明进一步进行描述。
[0051]
步骤1:选择激光水平仪作为校准源。通过激光水平仪放置在导轨上,并移动导轨使得激光水平仪的激光与锥台的中心处重合,其误差取决于激光水平仪的激光光线的直径,并记录导轨的位置d1。
[0052]
步骤2:将两个限位器、探针数据采集连接至采集卡,设置导轨的加速度a1和速度为v1。
[0053]
步骤3:实验阶段,探针从起始运动到尾端,并利用相同的采集频率(f)记录数据,得到探针数据序列[a1,a2,...,an]和限位器数据序列[b1,b2,...,bn]。
[0054]
步骤4:从限位器数据序列中找出限位器脉冲信号chg1;
[0055]
步骤5:根据数据序列长度n与采集频率计算出采集时间t;
[0056]
步骤6:根据加速度与速度计算出加速阶段的时间t
11
和减速阶段的时间t
12
,其中t1=t2。
[0057]
步骤7:根据时间间隔为1/f,构造与数据序列同长度的时间序列t=[t1,t2,...,tn];
[0058]
步骤8:根据加速度运动与匀速运动构造距离序列,其中:
[0059]
当t≤t
11
时,
[0060]
当t
11
≤t≤t
12
时,x
12
=x
11
v1(t-t
11
);
[0061]
当t
12
≤t时,
[0062]
最后构造出距离序列x=[x1,x2,...,xn];
[0063]
步骤9:根据x≤chg1,找到触发位置对应的最小索引值temp;
[0064]
步骤10:根据喷管的直径d,边缘位置为x
b1
=d1-d/2和x
b2
=d1 d/2;
[0065]
步骤11:寻找边缘位置索引值的temp1和temp2,对应采集数据的索引值为tpos1=chg1-(temp-temp1)和tpos2=chg1-(temp1-temp)以及位置信息x=[x
b1
:x
b2
];
[0066]
进一步,所述导轨反向运动,通过改变限位器脉冲信号chg1,可以重新改变。
[0067]
应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中,由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
[0068]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。