1.本发明涉及反窥探光电结合技术领域,尤其涉及一种目标追踪反窥探系统。
背景技术:
2.随着智能技术的发展,小型运动机器人或无人机,及装有各种图像采集装置的设备,可对一些商业目标、私人住所目标、甚至军事目标进行窥视和侦察。如此,企业的商业机密、个人的信息安全以及国家的军事机密面临着较大的泄露风险。因此,针对上述问题,有必要提出进一步地解决方案。
技术实现要素:
3.本发明旨在提供一种目标追踪反窥探系统,以克服现有技术中存在的不足。
4.为解决上述技术问题,本发明的技术方案是:
5.一种目标追踪反窥探系统,其包括:自动追踪模块、测距模块、激光生成模块以及主控模块;
6.所述自动追踪模块包括:相机单元以及角度调节单元;
7.所述相机单元与所述角度调节单元传动连接,所述主控模块通过所述角度调节单元控制所述相机单元扫描所监控的区域,所述主控模块在所述相机单元发现目标后发送指令信号至所述测距模块;
8.所述测距模块包括:激光测距单元以及处理器;
9.所述处理器根据所述指令信号,启动所述激光测距单元进行测距,并将测量得到的距离信息反馈至所述主控模块;
10.所述激光生成模块包括:激光器以及激光发射光路;
11.所述主控模块根据所述距离信息,控制所述激光器通过所述激光发射光路朝向所述目标发射激光。
12.作为本发明目标追踪反窥探系统的改进,所述角度调节单元包括:方位旋转定位机构和俯仰旋转定位机构;
13.所述相机单元与所述俯仰旋转定位机构传动连接,并由所述俯仰旋转定位机构驱动在竖直面内进行枢转摆动;所述方位旋转定位机构与所述俯仰旋转定位机构的底部传动连接,所述相机单元及俯仰旋转定位机构整体由所述方位旋转定位机构驱动在水平面内进行枢转摆动。
14.作为本发明目标追踪反窥探系统的改进,所述方位旋转定位机构和俯仰旋转定位机构均采用伺服电机;
15.所述相机单元由两组伺服电机驱动,在相应精密角光栅尺度量下,在竖直面0
°
~360
°
的角度范围内进行枢转摆动,在水平面0
°
~360
°
的角度范围内进行枢转摆动。
16.作为本发明目标追踪反窥探系统的改进,所述主控模块通过如下方法控制所述相机单元监控目标:
17.所述主控模块识别所述相机单元采集的图像中的目标图像,并根据所述目标图像在所述相机单元的视场中的实际偏移量,得到对应像素点坐标的变化值,进而计算出目标的方位以及俯仰旋转偏移量,所述主控模块根据所述目标的方位以及俯仰旋转偏移量控制所述相机单元进行追踪。
18.作为本发明目标追踪反窥探系统的改进,所述目标追踪反窥探系统还包括报警模块;所述主控单元在所述相机单元发现目标后,控制所述报警模块进行报警。
19.作为本发明目标追踪反窥探系统的改进,所述激光测距单元包括:测距光源、光源采样机构、聚焦机构以及探测器;
20.所述测距光源朝向目标发射测距光,经所述目标反射的测距光依次经所述聚焦机构、光源采样机构捕捉后发送给所述探测器,所述探测器根据光信号的传输时间计算目标距离,并将距离信息反馈至所述主控模块。
21.作为本发明目标追踪反窥探系统的改进,所述测距光源能够发射出测距光、倍频前的1064nm红外激光以及倍频后的532nm绿光;上述三束光通过多光合一光路机构后打到所述目标上。
22.作为本发明目标追踪反窥探系统的改进,所述多光合一光路机构包括依次设置的激光偏片和窄带滤光片。
23.作为本发明目标追踪反窥探系统的改进,所述激光发射光路包括:激光自动聚焦调整镜和一维自动聚焦移动单元;
24.所述主控模块根据所述距离信息设置所述激光自动聚焦调整镜的焦距,并控制所述一维自动聚焦移动单元移动的距离,所述激光器发出的激光经所述激光自动聚焦调整镜后打在所述目标上。
25.作为本发明目标追踪反窥探系统的改进,所述主控模块还对所述目标的种类进行识别,并控制所述激光器按照设定的光能和光斑尺寸朝向所述目标发射激光。
26.与现有技术相比,本发明的有益效果是:本发明的目标追踪反窥探系统中,通过自动追踪模块能够自动识别、追踪所监控的区域内的目标,并能够确定其所处的方位。同时,还通过测距模块计算得到目标距离,进而通过激光生成模块发射定向发射激光,实现对目标的干扰、炫光、致盲等,进而对所监控的区域进行反窥探保护,维护个人、集体的隐私安全。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
28.图1为本发明目标追踪反窥探系统一实施例的模块图;
29.图2为本发明目标追踪反窥探系统一实施例的原理框图;
30.图3为本发明目标追踪反窥探系统中角度调节单元的结构示意图;
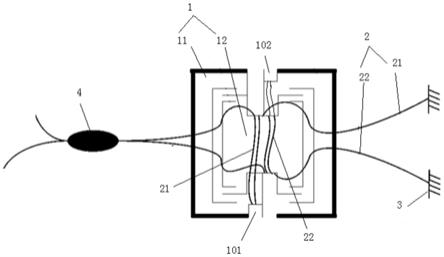
31.图4为本发明目标追踪反窥探系统一实施例中多光合一光路机构的结构示意图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.如图1、2所示,本发明一实施例提供一种目标追踪反窥探系统,其包括:自动追踪模块10、测距模块20、激光生成模块30以及主控模块40。
34.自动追踪模块10用于自动识别、追踪所监控的区域内的目标,并能够确定其所处的方位。
35.具体地,自动追踪模块10包括:相机单元11以及角度调节单元12。
36.其中,相机单元11可采用宽光谱自动聚焦相机。相机单元11进一步与角度调节单元12传动连接,角度调节单元12可带动相机单元11在空间360
°
的范围内进行扫描以寻找、追踪相应的目标。主控模块40通过角度调节单元12控制相机单元11扫描所监控的区域。
37.如图3所示,角度调节单元12具体包括:方位旋转定位机构121和俯仰旋转定位机构122。
38.其中,相机单元11与俯仰旋转定位机构122传动连接,并由俯仰旋转定位机构122驱动在竖直面内进行枢转摆动。方位旋转定位机构121与俯仰旋转定位机构122的底部传动连接,相机单元11及俯仰旋转定位机构122整体由方位旋转定位机构121驱动在水平面内进行枢转摆动。从而,在方位旋转定位机构121、俯仰旋转定位机构122的驱动下,相机单元11可在空间360
°
的范围内进行扫描。
39.为了实现对相机单元11的精确控制,方位旋转定位机构121和俯仰旋转定位机构122均采用伺服电机。相机单元11由两组伺服电机驱动,在相应精密角光栅尺度量下,在竖直面0
°
~360
°
的角度范围内进行枢转摆动,在水平面0
°
~360
°
的角度范围内进行枢转摆动。
40.此时,相机单元11连接于俯仰旋转伺服电机一侧的输出端,相应的,光栅读数头1221及圆形光栅1222设置于俯仰旋转伺服电机的另一侧。相机单元11及俯仰旋转伺服电机连接于方位旋转伺服电机的一侧的输出端,相应的,光栅读数头1211及圆形光栅1212设置于方位旋转伺服电机的另一侧。
41.上述精密角光栅尺可测量伺服电机的旋转角,其测量分辨率能够达到0.1mrad,测量精度达到0.025mrad。从而,通过精密角光栅尺获取的精密角位移信号,进而控制伺服电机旋转位移量,实现精确方向定位。
42.主控模块40在相机单元11发现目标后发送指令信号至测距模块20。该主控模块40可以为上位机,该上位机具有通信接口,通信接口包括但不限于以下各项:rs485接口、rs232接口、can总线接口。
43.其中,为了实现主控模块40对目标图像的识别,主控模块40通过如下方法控制相机单元11监控目标:
44.由于目标存在运动偏移量(x,y),主控模块40可识别相机单元11采集的图像中的目标图像发生的偏移(a,b),并根据该目标图像在相机单元11的视场中的实际偏移量(a,b),得到对应像素点坐标的变化值,进而计算出目标的方位以及俯仰旋转偏移量,主控模块
40根据目标的方位以及俯仰旋转偏移量控制相机单元11进行追踪。
45.此外,目标追踪反窥探系统还包括报警模块;主控单元在相机单元11发现目标后,控制报警模块进行报警。其中,报警的方式可以包括:声光报警或者发送报警信息等。相应的,报警模块可以为喇叭、指示灯或者为集成于主控模块40中的通讯模块等。
46.测距模块20用于计算目标与目标追踪反窥探系统之间的距离,进而根据该距离设置相应的焦距以及配置干扰激光的参数等。
47.具体地,测距模块20包括:激光测距单元21以及处理器22。处理器22根据指令信号,启动激光测距单元21进行测距,并将测量得到的距离信息反馈至主控模块40。
48.其中,处理器22可采用单片机,该单片机中存储有控制激光测距单元21的相应程序。激光测距单元21包括:测距光源211、光源采样机构212、聚焦机构213以及探测器214。
49.测距光源211朝向目标发射测距光。本实施例中,测距光源211能够发出多路测距光。一个实施方式中,测距光源211能够发射出测距光、倍频前的1064nm红外激光以及倍频后的532nm绿光。相应的,测距光源211中集成有测距激光发射器、红外激光发射器或者绿光发射器。如图4所示,上述三束光通过多光合一光路机构215后打到目标上。如此,多光合一光路机构215同时对不同波长的光束聚焦,不同光路的光束夹角可以很小,使得聚焦后的光路能够更好地打到同一目标上。
50.进一步地,多光合一光路机构215包括依次设置的激光偏片2151和窄带滤光片2152。其中,窄带滤光片2152的带宽1064
±
1nm,截止区域≥6d,波长532nm,激光反射率≥99.5%。
51.测距光源211发射的测距光经目标后,依次经聚焦机构213、光源采样机构212捕捉后发送给探测器214,探测器214根据光信号的传输时间以及光速可计算目标距离,并将距离信息反馈至主控模块40。
52.其中,探测器214的测距原理采用脉冲式激光测距原理,即:首先向目标射出一束或一序列短暂的脉冲激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,从而计算出从激光测距单元21到目标的距离。
53.激光生成模块30用于在主控模块40的控制下,发射定向发射激光,实现对目标的干扰、炫光、致盲等,进而对所监控的区域进行反窥探保护。
54.具体地,激光生成模块30包括:激光器31以及激光发射光路32。主控模块40根据距离信息,控制激光器31通过激光发射光路32朝向目标发射激光。
55.其中,激光器31可采用中功率激光器31。激光发射光路32包括:激光自动聚焦调整镜321和一维自动聚焦移动单元322。此时,主控模块40根据距离信息设置激光自动聚焦调整镜321的焦距,并控制一维自动聚焦移动单元322移动的距离,激光器31发出的激光经激光自动聚焦调整镜321后打在目标上,实现对目标的干扰、炫光、致盲等。
56.一个实施方式中,一维自动聚焦移动单元322可采用步进电机或伺服电机。此时,可将激光自动聚焦调整镜321安装在步进电机或伺服电机驱动的丝杆上,通过电机旋转移动组合透镜位置,实现光线聚焦或散焦。
57.此外,激光生成模块30还可根据不同的目标种类,发射相应的干扰激光。此时,主控模块40还对目标的种类(动物、无人运动目标(无人机、侦查机器人)等)进行识别,并根据目标种类与光能和光斑的匹配关系,控制激光器31按照设定的光能和光斑尺寸朝向目标发
射激光,实现相应的反窥探效果。
58.一个实施方式中,光源采样机构212可采用滤光片,其可反射激光滤掉背景杂散光;聚焦机构213可采用接收光线聚焦镜组合或组合透镜。
59.综上所述,本发明的目标追踪反窥探系统中,通过自动追踪模块能够自动识别、追踪所监控的区域内的目标,并能够确定其所处的方位。同时,还通过测距模块计算得到目标距离,进而通过激光生成模块发射定向发射激光,实现对目标的干扰、炫光、致盲等,进而对所监控的区域进行反窥探保护,维护个人、集体的隐私安全。
60.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
61.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。