1.本发明涉及一种用于对管和型材进行内部焊接的装置和方法,该装置包括悬臂,悬臂固定在悬架上,悬臂能引入到待焊接的管或型材中并且焊接头能移动地安装在悬臂上,其中,悬臂还包括激光器和照相机。
背景技术:
2.在内部焊接时,焊接头通常安置在长的悬臂的端部上,该悬臂驶入管或型材中。焊接所需的介质(气体、焊接电流、焊接线缆、焊剂、焊丝、
…
)通过悬臂或在悬臂上沿着其被引导至焊接头。
3.这种装置和方法是已知的,例如由us 3,764,056和us 10,040,141 b2已知。
4.文献us 3,764,056公开了一种装置,借助该装置可从管内侧开始将管焊接在一起。在此,在其尖端布置焊接头的悬臂被推入管中,使得焊接头位于待焊接的区域的附近,该区域由彼此接合的管的接触面形成。管进行旋转,可调节地安装的焊接头产生焊缝。借助安装在焊接头附近处的照相机可在视觉上观察焊接过程并且进行远程控制。焊接头在焊接过程期间可相对于管定位。
5.文献us 10,040,141描述了一种受激光器控制的用于管路的内焊机。该系统包括外部的定位机构,借助该外部的定位机构可使得待焊接的管区段相对彼此定向,使得可借助内焊机焊接管区段。焊接设备也包括用于监控焊接构型和用于引导焊接头的铰接头的激光器。也有用于在焊接过程之后可视地检查焊缝的照相机。
6.在此使用激光器检测构型还由cn 106705857 a已知。cn 106705857 a涉及借助激光系统在建筑地质、即基坑工程和隧道工程的区域上测量表面。为此将位于待测量的表面上的激光器对准固定定位的平板。如果激光器沿着表面运动或在激光器固定时表面移动,由激光束在平板上产生的光点相应地改变或移动。由于平板上的光点的移动,此时可得出表面的结构。
7.但是所述的内焊机有一些主要问题:在焊接过程期间产生磁场,磁场使得悬臂偏转和/或转动。偏转和/或转动的程度与悬臂被引入到待焊接的管或型材中的程度相关。此外,由于焊接过程本身以及将焊接介质运输至焊接头(尤其在“粉末下”焊接时;焊剂通常具有120℃的温度,并且焊接线缆可变热直至100℃)产生高温,高温引起悬臂的弯曲和转动的额外改变。因此,转动例如也进行搅动,使得热的焊剂大多仅在悬臂的一侧上运输,并且使得焊接线缆基于不同的电流载荷而不是都具有相同的温度。在悬臂的长度大的情况下,本身小的温度差在左/右/上/下之间就会在悬臂端部/焊接头处引起大的偏转。
8.通过磁性和热作用引起的悬臂的三维转动、弯曲或偏转造成焊接头的位置的相应改变,焊接头由此不再位于期望的位置中,这不利地影响焊接过程和焊缝几何结构以及焊缝质量。
技术实现要素:
9.在此本发明将提供一种改进方案。
10.根据本发明,该目的通过以下方式实现,在开头所述类型的装置中有用于使焊接头移动的控制机构,一个或多个激光器安装在悬架上,一个或多个照相机安装在焊接头上,其中,一个或多个激光束分别对准一个或多个照相机并且可通过照相机识别到,有评估模块,该评估模块评估一个或多个照相机识别的激光束的相对位置的变化,可从中生成信号并且可将该信号输送给控制机构使得焊接头移动。
11.因此本发明的对象是根据权利要求1所述的装置。
12.本发明中管也可是管状的元件,也可为椭圆形,型材例如是u形或矩形型材。
13.本发明的对象还是使焊接头在根据权利要求1至7中任一项或多项所述的装置中移动的方法,该方法至少包括以下步骤:
14.–
在装置的初始状态下借助照相机或每个照相机检测激光束或每个激光束的位置的初始值x、y,
15.–
在装置的运行期间检测激光束或每个激光束的位置与初始值x、y的偏移dx、dy,
16.–
由检测到的偏移dx、dy生成用于控制机构的信号,
17.–
将信号继续传导给控制机构,该控制机构基于信号使焊接头移动,使得偏移dx、dy变小。
18.激光束的相对位置的改变通过以下方式实现,激光束几乎位置固定地固紧在悬臂的悬架上,而在悬臂的端部处固定在焊接头上的照相机随着悬臂相对于位置固定的激光束的转动、弯曲、偏转或扭转移动。因此,通过将信号返回给控制机构产生闭合的调节回路来制导焊接头。检测偏移、生成信号和继续传导给控制机构优选持续地进行,例如“实时地”或间歇性有规律地或没有规律地、优选借助过程计算机进行。
19.在此焊接头可在至少两个空间方向上、例如竖直地和水平地移动地安装。有利地,焊接头可在三个空间方向上移动,例如额外地沿着或平行于悬臂的轴线移动。特别有利的是,焊接头也可转动地、例如沿着或平行于悬臂的轴线转动地被支承,即在识别到悬臂扭转时。水平的以及竖直的移动表现为激光束的位置的直线相对变化dx或dy,而扭转移动产生拱曲的偏移dx或dy。
20.原则上,本发明借助仅一个激光器和仅一个照相机工作。但是尤其在也需要识别转动或扭转时,为此需要多个激光器和多个照相机。
21.优选有两个也称为激光发射器或激光笔的激光器和两个照相机。由此可更好地分辨悬臂的水平的、竖直的、扭转引起的移动。其他的照相机-激光器-对附加地改进了分辨率。
22.优选地,照相机或每个照相机是矩阵式照相机。通过像素精确地形成激光束,可像素精确地分辨和计算激光束的位置的变化。
23.特别有利的是,在激光束和照相机之间的光路中布置投影面,优选透明着色的平板,特别优选透明白色着色的平板。在这种投影面上,可通过照相机更好地将激光束识别为色点并且跟踪。
24.来自传感器、例如焊接头上的高度传感器(伸出控制)或激光器缝制导传感器(焊缝跟踪)的附加的数据或测量值额外地改进对悬臂处效用的补偿或对焊接头的制导。优选
地在装置的初始状态下检测焊接头位置的初始值。在初始状态中装置是“冷的”,即装置具有环境温度。
25.通过本发明实现焊接错误的降低,例如尤其通过不精确的、甚至未限定的焊接头定位引起的“缝对齐”或“底切”的降低。此外降低了由装置操作中的影响因素,这改进了焊缝及其质量的可重复性。在根据现有技术的内部焊接设备中,焊接头位置在偏转和转动时必须由操作人员检查并且必要时重新关联。通过根据本发明的补偿系统整体实现了显著地改进焊接过程的可重复性,这体现在更好的焊缝质量、焊缝几何结构和较低的错误频率。
附图说明
26.本发明的其他特征和细节由权利要求和下面对附图中示出的本发明实施例的描述中得出。其中示出:
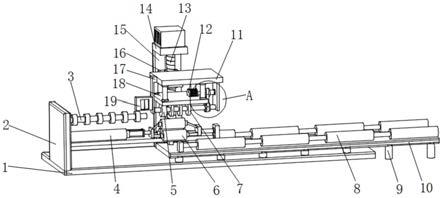
27.图1作为原理图示出了根据本发明的装置的可能的设计方案的俯视图和侧视图。
具体实施方式
28.在示出的装置1中悬臂2固定在悬架3上。待焊接的管或型材由于对于本发明的理解不是必须的而未示出。但是可想到装置1位于管或型材的中间。悬臂2由于磁性或温度作用引起的偏转通过虚线2a示出。俯视图沿水平方向,侧视图沿竖直方向。焊接头4在竖直和水平方向上可垂直于悬臂3的轴线移动地安装在悬臂2的端部上,其中,焊接头4本身未示出。在悬架3上固定有两个激光器5。每个激光束5a对准固定在悬臂3的端部上的两个照相机6。在激光器5和照相机6之间的光路中安装有透明、优选白色着色的平板7,其中,对于每个激光器可存在一对照相机,自然也可分别有平板7。平板7用作激光束2a的投影面,使得照相机6能将激光束很好地识别为点7a并且能跟踪其在水平方向x和竖直方向y中的相对位置。由不同的位置计算偏移dx和dy。借助(未示出的)处理器和相应的软件以及评估模块,由偏移生成信号并且返回给(同样未示出的)控制单元。而控制单元控制移动机构8(竖直)和9(水平),移动机构制导焊接头4,使得偏移dx和dy变小或在理想情况下消失。在示出的平板7中可看见激光束点7a,激光束点从照相机6来看由于偏转2a从位置x、y偏移到位置x dx、y dy。
29.在示出的示例中,悬臂2的长度看作30m。这不应理解为限制性的,而是仅给出对可能的尺寸数量级的预设。当然长度可更短以及更长。在附图中未示出可能的扭转。
30.附图标记列表
31.1 内部焊接装置
32.2 悬臂
33.2a 悬臂的偏转
34.3 悬架
35.4 焊接头
36.5 激光器
37.5a 激光束
38.6 照相机
39.7 投影面
40.8 移动机构(竖直)
41.9 移动机构(水平)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。