1.本发明涉及航空发动机领域,是一种建立航空发动机双转子系统模态特性两面三维表达方式的方法。
背景技术:
2.航空发动机双转子-支承系统含有两个转子,即高压转子和低压转子。通常,高压转子和低压转子之间设置有中介轴承,用于支承高压转子的涡轮端,从而形成结构耦合。低压转子和高压转子之间的转速必须符合特定的关系,即转速控制率或称共同工作线。双转子系统为一多源激励系统。由于存在高压激励源和低压激励源,因此,双转子系统的模态分为高压转子激励的模态和低压转子激励的模态两类模态,激起双转子振动的转子称为主激励转子,另一转子称为非主激励转子。另外,双转子系统的模态还与高、低压转子的自转角速度和转速控制律,包括转动方向紧密相关。当转子自转方向和公转方向相同时,称转子做正进动;当转子自转方向和公转方向相反时,称转子做反进动。转子系统模态的确定和清晰的表达是转子动力学设计的核心任务,也是转子故障诊断的基础。目前,在转子动力学设计时,一般会根据转子系统的结构,建立有限元模型,进行数值计算,确定转子的模态。在此过程中,需要判断高压转子主激励的正进动模态和反进动模态,以及低压转子主激励的正进动模态和反进动模态,并予以清晰地表达出来。但对于对转的双转子系统,在动力学设计时,模态的确定和表达往往会出现混淆的情况,造成判断失误。因此,建立准确和清晰的双转子模态特性表达方法,意义重大。
3.ferraris g在“prediction of the dynamic behavior of non-symmetric coaxial co-or counter-rotating rotors[j].journal of sound and vibration,1996,195(4)649-666.”(doi:10.1006/jsvi.1996.0452)一文中提出了计算坎贝尔图的方法,之后坎贝尔图一直应用于表达航空发动机的模态特性。坎贝尔图的横坐标为主激励转子自转角速度,纵坐标为转子的自振频率。由于陀螺效应,转子的自振频率随着自转角速度变化而变化,将各个转速下转子的自振频率在坐标系中标识并连接,即得到转子自振频率随自转角速度的变化曲线。在坎贝尔图中从原点出发绘制一条斜率为1的射线称为转速激励线,转速激励线与转子自振频率曲线的交点即为双转子系统在主激励转子激励下的临界转速。双转子系统的临界转速分为正进动临界转速和反进动临界转速,对应的双转子系统模态称为正进动模态和反进动模态。单转子系统和同转双转子系统,斜率为正的曲线一般代表正进动,斜率为负的曲线一般代表反进动,但对于对转双转子系统,由于陀螺效应相互反向,无法通过斜率对正、反进动进行简单判断,需要准确的正、反进动模态判断方法和清晰的表达方法。
[0004]
张大义在“航空发动机整机动力学模型建立与振动特性分析[j]”,《推进技术》,2015,36(05):768-773(doi:10.13675/j.cnki.tjjs.2015.05.017)一文中以同转和对转时高、低压转子陀螺力矩对各阶模态振型作用规律不同为理论基础形成振型筛选法,以主激励转子的振型和坎贝尔图中曲线斜率为依据判断正、反进动。这需要人工经验成分,没有明
确的数学关系式对正反进动进行判别,在高、低压转子耦合较强时极易判断失误。并在表达双转子模态特性时,将高压主激励和低压主激励的正进动曲线绘制在一起,去掉反进动曲线,并同时代入高、低压转速关系曲线,两条转速线与正进动曲线的交点均为临界转速。没有将高、低压正进动临界转速进行区分,也没有对反进动临界转速进行表达,以高低压转速分别绘制转速线,无法体现双转子系统之间的转速关系,在临界转速处的高、低压转子转速值也不明确,表达拥挤且不清晰。
[0005]
王存在“对转双转子系统临界转速求解方法的改进与对比[j]”,《推进技术》,2021,42(06):1372-1379,(doi:10.13675/j.cnki.tjjs.190763)一文中,利用商业软件求解双转子系统在高压转速固定情况下的低压激励正进动临界转速,并将不同高压转速下的低压激励正进动临界转速绘制在一起以表达双转子系统模态特性。这种方式只能求解转速控制率较简单时的正进动临界转速,不适用复杂转速控制率下的双转子系统模态特性求解,并且表达反进动临界转速。
[0006]
现有的航空发动机双转子系统模态判断和表达方式存在的上述不足,制约了双转子系统模态特性的研究。
技术实现要素:
[0007]
为克服现有技术中存在的正、反进动模态无法准确判断,模态特性表达不清晰,低压转子转速和高压转子转速关系关联不明确的问题,本发明提出了一种建立双转子系统模态特性两面三维表达方式的方法。
[0008]
本发明的具体过程是:
[0009]
步骤1,确定航空发动机双转子系统的参数:
[0010]
所述航空发动机双转子系统的参数包括有限元结构参数和各主激励转子转速及对应的非主激励转子转速。
[0011]
所述航空发动机双转子系统的有限元结构参数包括各个轴段的长度、外直径、内直径、密度、弹性模量和泊松比,各个盘的位置、质量、直径转动惯量、极转动惯量,各个支点的位置和刚度
[0012]
所述主激励转子为低压转子,各主激励转子转速为低压转速ω
l
,单位为r/min;所述各非主激励转子转速为高压转速ωh,单位为r/min;该低压转速ω
l
和高压转速ωh之间满足航空发动机双转子系统转速控制率。
[0013]
所确定低压转速ω
l
取值范围为[0,6000],以所述低压转速ω
l
为自变量,高压转速ωh为因变量,转速控制率为:
[0014][0015]
所述各主激励转子转速为低压转速ω
l
;该低压转速ω
l
的取值范围为[0,6000];各所述转速的单位为r/min。每隔10r/min取一个转速值,包括两端值0r/min和6000r/min,共601个转速值。
[0016]
所述低压转速ω
l
分别与601个高压转速ωh一一对应。所述各高压转速ωh是主激励转子转速对应的非主激励转子转速,将所述601个低压转速ω
l
分别代入转速控制率式
(13),得到所述601个高压转速ωh。
[0017]
步骤2,确定振动速度和振动位移:
[0018]
根据步骤1中确定的航空发动机双转子系统有限元结构参数、低压转速及对应的高压转速,采用有限元法确定各低压转速下航空发动机双转子系统各阶进动的自振频率及对应所有节点的振动速度和振动位移。
[0019]
所述确定振动速度和振动位移的具体过程是:
[0020]
将步骤1中确定的航空发动机双转子系统有限元结构参数分别代入有限元,分别得到该航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵和高压转子陀螺效应矩阵。
[0021]
将得到的所述航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵、高压转子陀螺效应矩阵和步骤1中确定的各低压转速及对应的高压转速分别代入有限元法的微分方程中,通过求解微分方程对应的齐次方程,得到各低压转速下齐次方程的所有特征值及与各特征值对应的特征向量;该特征值为复数,包括实部和虚部;特征值虚部的绝对值为自振频率,特征向量为对应的所有节点的振动速度和振动位移。
[0022]
步骤2中所述各低压转速下齐次方程的特征值为成对出现且互为复共轭,对应的两个特征向量也是互为共轭的复向量。设任一低压转速下求得航空发动机双转子系统第i阶进动对应的一对特征值λi和λ
i 1
为:
[0023]
λi=αi jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0024]
λ
i 1
=α
i-jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0025]
式(14)、(15)中,αi为衰减指数,ω
ri
为第i阶进动的自振频率,下标i均代指任一低压转速下求得的航空发动机双转子系统第i阶进动,与特征值λi和λ
i 1
对应的特征向量分别为h
0i
和h
0i 1
,且有:
[0026][0027]
在第i阶进动处,转子的状态向量hi表示为:
[0028][0029]
式(17)中,a
0i
为常数,由初始条件决定。
[0030]
将式(14)、(15)和(16)代入式(17),得到:
[0031][0032]
式(18)中,括号外的时变系数a
0ieαt
决定了转子系统的稳定性。而进动特性则由特征向量来确定。
[0033]
特征向量h
0i
包含了转子所有节点的振动速度和振动位移。设该特征向量在转子某一截面沿x方向的分量xi和y方向的分量yi分别为:
[0034]
xi=x
i,re
jx
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0035]
yi=y
i,re
jy
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0036]
式中:x
i,re
为特征向量h
0i
在转子任一截面沿x方向分量的实部;x
i,im
为特征向量h
0i
在转子任一截面沿x方向的分量的虚部;y
i,re
为特征向量h
0i
在转子任一截面沿y方向的分量的实部;y
i,im
为特征向量h
0i
在转子任一截面沿y方向的分量的虚部。
[0037]
步骤3,确定各低压转速下航空发动机双转子系统各阶进动为正进动或反进动:
8000,0]区域。分别连接标记的所述各低压转速下相同阶次的正进动自振频率和反进动自振频率,得到3条正进动自振频率曲线和3条反进动自振频率曲线。
[0062]
绘制所述转速激励线时,在所述垂直面上绘制斜率为1的转速激励线;该转速激励线的起点为所述z轴的0点处。所述转速激励线与3条正进动自振频率曲线的3个交点均为低压转子激起的正进动临界转速点。
[0063]
以各低压转子激起的正进动临界转速点为起点,向x轴的方向作3条正进动临界转速点延伸线。该3条正进动临界转速点延伸线均为虚线,并且平行于z轴。所述3条正进动临界转速点延伸线与x轴形成3个交点,该3个交点均为航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速。
[0064]
在水平面上绘制所述航空发动机双转子系统共同工作线。具体是:
[0065]
将步骤1所述航空发动机双转子系统601个低压转速分别在x轴上标记,将与所述601个低压转速相对应的601个高压转速分别在y轴上标记。以标记的各低压转速为起点做平行于y轴的延伸线,以标记的各高压转速为起点做平行于x轴的延伸线,得到各低压转速延伸线和该低压转速对应的高压转速延伸线在水平面上的601个交点。连接该601个交点,得到航空发动机双转子系统共同工作线。
[0066]
以所述3个低压转子临界转速为起点沿y轴的正方向做3条低压转子临界转速延伸线,该3条低压转子临界转速延伸线标记为虚线,并且平行于y轴。该3条低压转子临界转速延伸线与共同工作线的3个交点为低压转子临界转速在共同工作线上对应点。
[0067]
以所述3个低压转子临界转速在共同工作线上对应点为起点,作平行于x轴的3条高压转子临界转速延伸线;该3条高压转子临界转速延伸线与y轴的3个交点均为航空发动机双转子系统低压转子激起正进动模态时的高压转子临界转速。
[0068]
与现有技术相比较,本发明取得的有益效果为:
[0069]
本发明所建立的航空发动机双转子系统两面三维表达方式针对现有技术中存在的正、反进动模态无法准确判断,模态特性表达不清晰,低压转子转速和高压转子转速关系关联不明确等主要问题:
[0070]
1.系统性地建立了航空发动机双转子系统正、反进动模态的判断方法,通过数学关系式,明确地对航空发动机双转子系统在主激励转子激励下的各阶进动进行区分,主激励转子为低压转子和主激励转子为高压转子的情况均适用,判别参数在求解航空发动机双转子系统有限元微分方程对应的齐次方程时获得,判别条件明确。
[0071]
2.采用航空发动机双转子自振频率和临界转速的两面三维图对航空发动机双转子系统的模态特性进行表达,在垂直面中将正进动自振频率曲线与反进动自振频率曲线上下分开表示,可以直观地对正、反进动模态进行区分,避免混淆。因为垂直面上部均为正进动自振频率曲线,所以主激励转子激起的各阶正进动临界转速通过转速激励线与正进动自振频率曲线的交点可以明确。
[0072]
3.在航空发动机双转子自振频率和临界转速的两面三维图的水平面绘制共同工作线,垂直面获得的航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速,通过共同工作线得到对应航空发动机双转子系统低压转子激起正进动模态时的高压转子临界转速,过程简单,关联明确,表达清晰。
[0073]
解决以上关键问题后,将本发明的方法应用于航空发动机双转子系统正、反进动
模态的判断和模态特性的表达,对双转子航空发动机的模态特性研究具有重要辅助作用,为理解和分析转子动力学特性提供了直观和准确的图景。
附图说明
[0074]
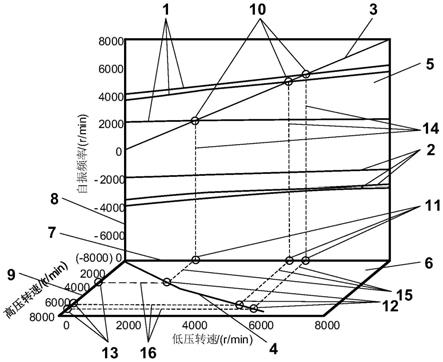
图1是航空发动机双转子自振频率和临界转速的两面三维图。
[0075]
图中:1.正进动自振频率曲线;2.反进动自振频率曲线;3.转速激励线;4.共同工作线;5.垂直面;6.水平面;7.x轴;8.z轴;9.y轴;10.低压转子激起的正进动临界转速点;11.低压转子临界转速;12.低压转子临界转速在共同工作线上对应点;13.高压转子临界转速;14.正进动临界转速点延伸线;15.低压转子临界转速延伸线;16.高压转子临界转速延伸线。
具体实施方式
[0076]
本实施实例是针对某型航空发动机双转子系统建立其模态特性两面三维表达方式的方法。具体过程如下:
[0077]
步骤1,确定航空发动机双转子系统的参数:
[0078]
所述航空发动机双转子系统的参数包括有限元结构参数和各主激励转子转速及对应的非主激励转子转速。
[0079]
所述航空发动机双转子系统的有限元结构参数包括各个轴段的长度、外直径、内直径、密度、弹性模量和泊松比,各个盘的位置、质量、直径转动惯量、极转动惯量,各个支点的位置和刚度,确定的过程分别为:
[0080]
各个轴段的长度、外直径、内直径,各个盘的位置、质量、直径转动惯量、极转动惯量,各个支点的位置和刚度均根据该型航空发动机双转子系统工程图纸和资料确定,各个轴段的密度、弹性模量和泊松比通过查阅《金属材料手册》确定。
[0081]
本实施实例中确定主激励转子为低压转子,各主激励转子转速为低压转速ω
l
,单位为r/min;所述各非主激励转子转速为高压转速ωh,单位为r/min;该低压转速ω
l
和高压转速ωh之间满足航空发动机双转子系统转速控制率。
[0082]
所述航空发动机双转子系统转速控制率通过查询《航空发动机设计手册》确定。
[0083]
本实施实例中确定低压转速ω
l
取值范围为[0,6000],以所述低压转速ω
l
为自变量,高压转速ωh为因变量,转速控制率为:
[0084][0085]
所述各主激励转子转速为低压转速ω
l
;该低压转速ω
l
的取值范围为[0,6000];各所述转速的单位为r/min。每隔10r/min取一个转速值,包括两端值0r/min和6000r/min,共601个转速值。
[0086]
所述各主激励转子转速为低压转速ω
l
;该低压转速ω
l
的取值范围为[0,6000];各所述转速的单位为r/min。每隔10r/min取一个转速值,包括两端值0r/min和6000r/min,共601个转速值。
[0087]
所述低压转速ω
l
分别与601个高压转速ωh一一对应。所述各高压转速ωh是主激
励转子转速对应的非主激励转子转速将所述601个低压转速ω
l
分别代入转速控制率式(13),得到所述601个高压转速ωh。
[0088]
步骤2,确定振动速度和振动位移:
[0089]
根据步骤1中确定的航空发动机双转子系统有限元结构参数、低压转速ω
l
及与之对应的高压转速ωh,采用有限元法确定各低压转速下航空发动机双转子系统各阶进动的自振频率及对应所有节点的振动速度和振动位移。具体过程如下:
[0090]
采用现有技术,将步骤1中确定的航空发动机双转子系统有限元结构参数分别代入有限元,分别得到该航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵和高压转子陀螺效应矩阵。
[0091]
采用现有技术,将得到的所述航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵、高压转子陀螺效应矩阵和步骤1中确定的各低压转速ω
l
及高压转速ωh分别代入有限元法的微分方程中,通过求解微分方程对应的齐次方程,得到各低压转速下齐次方程的所有特征值及与各特征值对应的特征向量;该特征值为复数,包括实部和虚部;特征值虚部的绝对值为自振频率,特征向量为对应的所有节点的振动速度和振动位移。
[0092]
步骤3,确定各低压转速下航空发动机双转子系统各阶进动为正进动或反进动:
[0093]
步骤2中所述各低压转速下齐次方程的特征值为成对出现且互为复共轭,对应的两个特征向量也是互为共轭的复向量。设任一低压转速下求得航空发动机双转子系统第i阶进动对应的一对特征值λi和λ
i 1
为:
[0094]
λi=αi jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0095]
λ
i 1
=α
i-jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0096]
式(14)、(15)中,αi为衰减指数,ω
ri
为第i阶进动的自振频率,下标i均代指任一低压转速下求得的航空发动机双转子系统第i阶进动,与特征值λi和λ
i 1
对应的特征向量分别为h
0i
和h
0i 1
,且有:
[0097][0098]
在第i阶进动处,转子的状态向量hi表示为:
[0099][0100]
式(17)中,a
0i
为常数,由初始条件决定。
[0101]
将式(14)、(15)和(16)代入式(17),得到:
[0102][0103]
式(18)中,括号外的时变系数a
0ieαt
决定了转子系统的稳定性。而进动特性则由特征向量来确定。
[0104]
特征向量h
0i
包含了转子所有节点的振动速度和振动位移。设该特征向量在转子某一截面沿x方向的分量xi和y方向的分量yi分别为:
[0105]
xi=x
i,re
jx
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0106]
yi=y
i,re
jy
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0107]
式中:x
i,re
为特征向量h
0i
在转子任一截面沿x方向分量的实部;x
i,im
为特征向量h
0i
在转子任一截面沿x方向的分量的虚部;y
i,re
为特征向量h
0i
在转子任一截面沿y方向的分量
的实部;y
i,im
为特征向量h
0i
在转子任一截面沿y方向的分量的虚部。
[0108]
转子的进动ri为:
[0109][0110]
将式(19)和式(20)代入式(21),并将单位进动量和的系数合并,得到如下的结果:
[0111][0112]
式(22)中,[(x
i,re-y
i,im
) j(x
i,im
y
i,re
)]为正进动分量;[(x
i,re
y
i,im
) j(y
i,re-x
i,im
)]为反进动分量。
[0113]
当公式(23)成立时;
[0114]
(x
i,re-y
i,im
)2 (x
i,im
y
i,re
)2>(x
i,re
y
i,im
)2 (y
i,re-x
i,im
)2ꢀꢀꢀ
(23)
[0115]
将公式(23)进一步化简,当公式(24)
[0116]
x
i,imyi,re-x
i,reyi,im
>0
ꢀꢀꢀ
(24)
[0117]
时,转子发生正进动,第i阶进动为正进动。
[0118]
反之,当:
[0119]
x
i,imyi,re-x
i,reyi,im
<0
ꢀꢀꢀ
(25)
[0120]
时,转子进动为反进动,第i阶进动则为反进动。
[0121]
x
i,imyi,re-x
i,reyi,im
=0的情况在双转子运行时不会出现。
[0122]
所述x
i,re
,x
i,im
,y
i,re
和y
i,im
通过步骤2各低压转速下航空发动机双转子系统各阶进动对应所有节点的振动速度和振动位移确定。
[0123]
步骤4,绘制航空发动机双转子自振频率和临界转速的两面三维图:
[0124]
如图1所示,所述航空发动机双转子自振频率和临界转速的两面三维图包含三个维度和两个表达面。
[0125]
所述航空发动机双转子自振频率和临界转速的两面三维图根据步骤1所述航空发动机双转子系统各低压转速及对应的高压转速、步骤2所述各低压转速下航空发动机双转子系统各阶进动的自振频率,以及步骤3所述各低压转速下航空发动机双转子系统各阶进动为正进动或反进动的判断结果绘制。具体过程如下:
[0126]ⅰ建立空间直角坐标系。
[0127]
所述空间直角坐标系包括三个维度,分别是x轴7、y轴9和z轴8。其中:所述x轴7为低压转速的坐标轴,单位为r/min;该x轴7的长度为[0,8000],记为x[0,8000]。所述y轴9为高压转速的坐标轴,单位为r/min,该y轴9的长度为[0,8000],记为y[0,8000]。所述z轴8为自振频率的坐标轴,单位为r/min;该z轴8的长度为[-8000,8000],记为z[-8000,8000]。
[0128]
所述z轴8长度对称中心的刻度为0,该0以上为正值,以下为负值。所述x轴7、y轴9和z轴8构成所述航空发动机双转子自振频率和临界转速的两面三维图中的三个维度。
[0129]
令x[0,8000]z[-8000,8000]平面为垂直面5,令x[0,8000]y[0,8000]平面为水平面6,由垂直面5与水平面6共同构成航空发动机双转子自振频率和临界转速的两面三维图的两个表达面。
[0130]ⅱ标记双转子系统各阶进动的自振频率
[0131]
将所述各低压转速下航空发动机双转子系统各阶进动的自振频率在垂直面5上标
记出来;其中被确定为正进动的自振频率标记在所述z轴正值[0,8000]区域,被确定为反进动的自振频率取相反数后标记在该z轴负值[-8000,0]区域。分别连接标记的所述各低压转速下相同阶次的正进动自振频率和反进动自振频率,得到多条正进动自振频率曲线1和多条反进动自振频率曲线2。
[0132]
本实施实例中,存在3阶正进动自振频率和3阶反进动自振频率,因此存在3条正进动自振频率曲线1和3条反进动自振频率曲线2。
[0133]ⅲ绘制转速激励线
[0134]
在垂直面5上绘制斜率为1的转速激励线3;该转速激励线3的起点为所述z轴8的0点处。所述转速激励线3与3条正进动自振频率曲线1的3个交点均为低压转子激起的正进动临界转速点10。
[0135]
以各低压转子激起的正进动临界转速点10为起点,向x轴7的方向作3条正进动临界转速点延伸线14。该3条正进动临界转速点延伸线14均为虚线,并且平行于z轴8。所述3条正进动临界转速点延伸线14与x轴7形成3个交点,该3个交点均为航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速11。
[0136]ⅳ绘制双转子系统共同工作线
[0137]
在水平面6上绘制航空发动机双转子系统共同工作线4。具体是:
[0138]
将步骤1所述航空发动机双转子系统601个低压转速分别在x轴上标记,将与所述601个低压转速相对应的601个高压转速分别在y轴上标记。以标记的各低压转速为起点做平行于y轴的延伸线,以标记的各高压转速为起点做平行于x轴的延伸线,得到各低压转速延伸线和该低压转速对应的高压转速延伸线在水平面6上的601个交点。连接该601个交点,得到航空发动机双转子系统共同工作线4。
[0139]
以所述3个低压转子临界转速11为起点沿y轴的正方向做3条低压转子临界转速延伸线15,该3条低压转子临界转速延伸线15标记为虚线,并且平行于y轴。该3条低压转子临界转速延伸线15与共同工作线4的3个交点为低压转子临界转速在共同工作线上对应点12。
[0140]
以所述3个低压转子临界转速在共同工作线上对应点12为起点,作平行于x轴7的3条高压转子临界转速延伸线16;该3条高压转子临界转速延伸线16与y轴9的3个交点均为航空发动机双转子系统低压转子激起正进动模态时的高压转子临界转速13。
[0141]
至此,建立了航空发动机双转子系统两面三维表达方式。
[0142]
本实施实例所建立的航空发动机双转子系统两面三维表达方式通过数学方式明确地对航空发动机双转子系统在低压转子激励下的各阶进动进行了区分,判别参数在求解航空发动机双转子系统有限元微分方程对应的齐次方程时获得,判别条件明确。
[0143]
本实施实例采用图1所示的航空发动机双转子自振频率和临界转速的两面三维对航空发动机双转子系统的模态特性进行了表达,在垂直面5中将正进动自振频率曲线1与反进动自振频率曲线2上下分开表示,可以直观地对正、反进动模态进行区分,避免混淆。因为垂直面5上部均为正进动自振频率曲线1,所以低压转子激起的正进动临界转速点10通过转速激励线3与正进动自振频率曲线1的交点可以明确。
[0144]
本实施实例在图1所示的航空发动机双转子自振频率和临界转速的两面三维图的水平面6绘制共同工作线4,垂直面5获得的航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速11,通过共同工作线4得到对应航空发动机双转子系统低压转子
激起正进动模态时的高压转子临界转速13,过程简单,关联明确,表达清晰。
[0145]
本实施实例应用于航空发动机双转子系统正、反进动模态的判断和模态特性的表达,对双转子航空发动机的模态特性研究具有重要辅助作用,主激励转子为低压转子和高压转子的情况均适用,为理解和分析转子动力学特性提供了直观和准确的图景。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。