技术特征:
1.一种建立双转子系统模态特性两面三维表达方式的方法,其特征在于,具体过程是:步骤1,确定航空发动机双转子系统的参数:所述航空发动机双转子系统的参数包括有限元结构参数和各主激励转子转速及对应的非主激励转子转速;步骤2,确定振动速度和振动位移:根据步骤1中确定的航空发动机双转子系统有限元结构参数、低压转速及对应的高压转速,采用有限元法确定各低压转速下航空发动机双转子系统各阶进动的自振频率及对应所有节点的振动速度和振动位移;步骤3,确定各低压转速下航空发动机双转子系统各阶进动为正进动或反进动:通过转子的进动r
i
确定各低压转速下航空发动机双转子系统各阶进动为正进动或反进动:所述转子的进动r
i
为:将x
i
和y
i
代入式(21),并将单位进动量与的系数合并,得到如下的结果:式(22)中,[(x
i,re-y
i,jm
) j(x
i,im
y
i,re
)]为正进动分量;[(x
i,re
y
i,jm
) j(y
i,im-x
i,re
)]为反进动分量;当公式(23)成立时;(x
i,re-y
i,im
)2 (x
i,im
y
i,re
)2>(x
i,re
y
i,im
)2 (y
i,re-x
i,im
)2ꢀꢀꢀꢀ
(23)将公式(23)进一步化简,当公式(24)x
i,im
y
i,re-x
i,re
y
i,im
>0
ꢀꢀꢀꢀ
(24)时,转子发生正进动,第i阶进动为正进动;反之,当:x
i,im
y
i,re-x
i,re
y
i,im
<0
ꢀꢀꢀꢀ
(25)时,转子进动为反进动,第i阶进动则为反进动;x
i,im
y
i,re
x
i,re
y
i,im
=0的情况在双转子运行时不会出现。所述x
i,re
,x
i,im
,y
i,re
和y
i,im
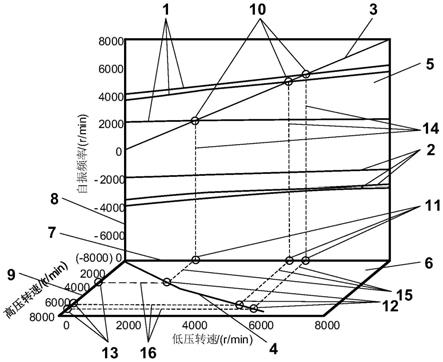
通过步骤2各低压转速下航空发动机双转子系统各阶进动对应所有节点的振动速度和振动位移确定;步骤4,绘制航空发动机双转子自振频率和临界转速的两面三维图:由空间直角坐标系的x轴、y轴和z轴,以及该空间直角坐标系中的两个面沟通构成所述航空发动机双转子自振频率和临界转速的两面三维图中的三个维度和两个表达面;绘制所述航空发动机双转子自振频率和临界转速的两面三维图时,将得到的所述航空发动机双转子系统各低压转速及对应的高压转速、各低压转速下航空发动机双转子系统各阶进动的自振频率,以及确定的各低压转速下航空发动机双转子系统各阶进动为正进动结果或反进动结果,分别标记在空间直角坐标系中,从而得到:多条正进动自振频率曲线和多条反进动自振频率曲线、得到转速激励线,以及航空发动机双转子系统共同工作线;至此,建立了航空发动机双转子系统两面三维表达方式。2.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,
所述航空发动机双转子系统的有限元结构参数包括各个轴段的长度、外直径、内直径、密度、弹性模量和泊松比,各个盘的位置、质量、直径转动惯量、极转动惯量,各个支点的位置和刚度所述主激励转子为低压转子,各主激励转子转速为低压转速ω
l
,单位为r/min;所述各非主激励转子转速为高压转速ω
h
,单位为r/min;该低压转速ω
l
和高压转速ω
h
之间满足航空发动机双转子系统转速控制率。3.如权利要求2所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,所确定低压转速ω
l
取值范围为[0,6000],以所述低压转速ω
l
为自变量,高压转速ω
h
为因变量,转速控制率为:所述各主激励转子转速为低压转速ω
l
;该低压转速ω
l
的取值范围为[0,6000];各所述转速的单位为r/min。每隔10r/min取一个转速值,包括两端值0r/min和6000r/min,共601个转速值。4.如权利要求2所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,所述低压转速ω
l
分别与601个高压转速ω
h
一一对应;所述各高压转速ω
h
是主激励转子转速对应的非主激励转子转速将所述601个低压转速ω
l
分别代入转速控制率式(13),得到所述601个高压转速ω
h
。5.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,所述步骤2中确定振动速度和振动位移的具体过程是:将步骤1中确定的航空发动机双转子系统有限元结构参数分别代入有限元,分别得到该航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵和高压转子陀螺效应矩阵;将得到的所述航空发动机双转子系统的质量矩阵、刚度矩阵、阻尼矩阵、低压转子陀螺效应矩阵、高压转子陀螺效应矩阵和步骤1中确定的各低压转速及对应的高压转速分别代入有限元法的微分方程中,通过求解微分方程对应的齐次方程,得到各低压转速下齐次方程的所有特征值及与各特征值对应的特征向量;该特征值为复数,包括实部和虚部;特征值虚部的绝对值为自振频率,特征向量为对应的所有节点的振动速度和振动位移。6.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,步骤2中所述各低压转速下齐次方程的特征值为成对出现且互为复共轭,对应的两个特征向量也是互为共轭的复向量;设任一低压转速下求得航空发动机双转子系统第i阶进动对应的一对特征值λ
i
和λ
i 1
为:λ
i
=α
i
jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)λ
i 1
=α
i-jω
ri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)式(14)、(15)中,α
i
为衰减指数,ω
ri
为第i阶进动的自振频率,下标i均代指任一低压转速下求得的航空发动机双转子系统第i阶进动,与特征值λ
i
和λ
i 1
对应的特征向量分别为h
0i
和h
0i 1
,且有:
在第i阶进动处,转子的状态向量h
i
表示为:式(17)中,a
0i
为常数,由初始条件决定;将式(14)、(15)和(16)代入式(17),得到:式(18)中,括号外的时变系数a
0i
e
αt
决定了转子系统的稳定性;而进动特性则由特征向量来确定;特征向量h
0i
包含了转子所有节点的振动速度和振动位移;设该特征向量在转子某一截面沿x方向的分量x
i
和y方向的分量y
i
分别为:x
i
=x
i,re
jx
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)y
i
=y
i,re
jy
i,im
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)式中:x
i,re
为特征向量h
0i
在转子任一截面沿x方向分量的实部;x
i,im
为特征向量h
0i
在转子任一截面沿x方向的分量的虚部;y
i,re
为特征向量h
0i
在转子任一截面沿y方向的分量的实部;y
i,im
为特征向量h
0i
在转子任一截面沿y方向的分量的虚部。7.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,所述空间直角坐标系的三个维度分别是x轴、y轴和z轴;其中:所述x轴为低压转速的坐标轴,单位为r/min;该x轴的长度为[0,8000],记为x[0,8000];所述y轴为高压转速的坐标轴,单位为r/min,该y轴的长度为[0,8000],记为y[0,8000];所述z轴为自振频率的坐标轴,单位为r/min;该z轴的长度为[-8000,8000],记为z[-8000,8000];所述z轴长度对称中心的刻度为0,该0以上为正值,以下为负值;所述空间直角坐标系的两个表达面分别是垂直面和水平面;其中,该垂直面为x[0,8000]z[-8000,8000]平面,该水平面为x[0,8000]y[0,8000]平面。8.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,在标记双转子系统各阶进动的自振频率时,将所述各低压转速下航空发动机双转子系统各阶进动的自振频率在垂直面上标记出来;其中被确定为正进动的自振频率标记在所述z轴正值[0,8000]区域,被确定为反进动的自振频率取相反数后标记在该z轴负值[-8000,0]区域;分别连接标记的所述各低压转速下相同阶次的正进动自振频率和反进动自振频率,得到3条正进动自振频率曲线和3条反进动自振频率曲线。9.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,绘制所述转速激励线时,在所述垂直面上绘制斜率为1的转速激励线;该转速激励线的起点为所述z轴的0点处;所述转速激励线与3条正进动自振频率曲线的3个交点均为低压转子激起的正进动临界转速点;以各低压转子激起的正进动临界转速点为起点,向x轴的方向作3条正进动临界转速点延伸线;该3条正进动临界转速点延伸线均为虚线,并且平行于z轴;所述3条正进动临界转速点延伸线与x轴形成3个交点,该3个交点均为航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速。10.如权利要求1所述建立双转子系统模态特性两面三维表达方式的方法,其特征在于,在水平面上绘制所述航空发动机双转子系统共同工作线;具体是:
将步骤1所述航空发动机双转子系统601个低压转速分别在x轴上标记,将与所述601个低压转速相对应的601个高压转速分别在y轴上标记;以标记的各低压转速为起点做平行于y轴的延伸线,以标记的各高压转速为起点做平行于x轴的延伸线,得到各低压转速延伸线和该低压转速对应的高压转速延伸线在水平面上的601个交点;连接该601个交点,得到航空发动机双转子系统共同工作线;以所述3个低压转子临界转速11为起点沿y轴的正方向做3条低压转子临界转速延伸线,该3条低压转子临界转速延伸线标记为虚线,并且平行于y轴;该3条低压转子临界转速延伸线与共同工作线的3个交点为低压转子临界转速在共同工作线上对应点;以所述3个低压转子临界转速在共同工作线上对应点为起点,作平行于x轴的3条高压转子临界转速延伸线;该3条高压转子临界转速延伸线与y轴的3个交点均为航空发动机双转子系统低压转子激起正进动模态时的高压转子临界转速。
技术总结
一种建立双转子系统模态特性两面三维表达方式的方法,系统性地建立了航空发动机双转子系统正、反进动模态的判断方法,通过数学关系式,明确地对航空发动机双转子系统在主激励转子激励下的各阶进动进行区分,并将得到的双转子系统各阶进动的自振频率、转速激励线和双转子系统共同工作线绘制在建立的空间直角坐标系中,通过两面三维图表达航空发动机双转子自振频率和临界转速和航空发动机双转子系统低压转子激起正进动模态时的低压转子临界转速,并通过共同工作线得到对应航空发动机双转子系统低压转子激起正进动模态时的高压转子临界转速。本发明过程简单,关联明确,表达清晰,为理解和分析转子动力学特性提供了直观和准确的图景。准确的图景。准确的图景。
技术研发人员:王瑞 廖明夫 黄江博
受保护的技术使用者:西北工业大学
技术研发日:2022.01.08
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。