1.本发明涉及水下机器人自稳定领域,具体地说是一种并联三体水下机器人稳心高度的调节方法。
背景技术:
2.由于长期腐蚀、地质灾害等原因,近几十年来海洋油气设施事故屡有发生,不仅给油气工业带来重大影响,也给生命安全和生态环境带来了严重威胁。海洋中流场方向、大小复杂多变,且海流与油气设施接触后产生的涡流同样具有一定的复杂性,这些复杂的流场会对水下机器人作业姿态的有效保持带来极大挑战。
3.为了提升作业的姿态稳定能力,并联多体水下机器人得到了近些年的广泛关注。例如,上下结构的并联三体水下机器人相对于单体水下机器人具有更好的抗倾覆(旋转力矩更大)和自稳定能力。影响水下机器人自稳定能力的重要因素是稳心高度。稳心高度是指潜体重心和浮心之间的距离。这个距离很关键:如果距离太小,则潜体不稳,有慢摇倾向,稳性过小;如果距离太大,则有快摇倾向,稳性过大。
4.为了应对不同的海流环境干扰,影响自稳定能力的稳心高度调节具有重要意义。然而,针对并联三体水下机器人,目前尚未有一种可依据实际工况完成稳心高度调节的方法。
技术实现要素:
5.针对上述问题,本发明目的是提供一种并联三体水下机器人稳心高度的调节方法,建立出浮力调节量、相对位置调节后顶角大小与稳心高度的函数关系,为并联三体水下机器人稳心高度调节工作提供支撑。
6.本发明是通过以下技术方案来实现的:
7.一种并联三体水下机器人稳心高度的调节方法,包括通过以下步骤进行稳心高度的调节:
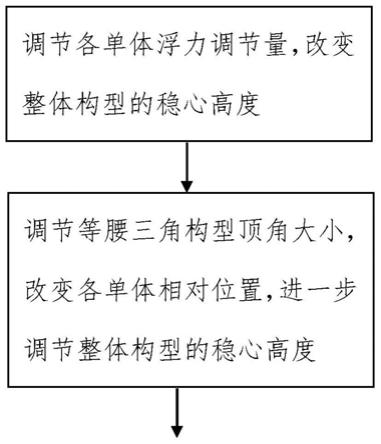
8.步骤1、计算各单体浮力调节量,输出指令用于改变整体构型的稳心高度;
9.步骤2、计算等腰三角构型的顶角大小,输出指令用于改变各单体相对位置,调节整体构型的稳心高度。
10.所述稳心高度为重心与浮心之间的距离。
11.所述步骤1包括:
12.根据重力平衡原理、浮力平衡原理,建立浮力调节量与稳心高度的函数关系;调节并联三体水下机器人各单体浮力,改变各单体的浮力差来调节其整体构型的稳心高度。
13.所述浮力调节量与稳心高度的函数关系为:
14.15.其中,h
tf
、h
t
、l和θ
t
分别为并联三体水下机器人的浮力调节后稳心高度、浮力调节后新浮心纵坐标、重心纵坐标、浮力调节前的稳心高度、腰长和顶角大小,hs为单体水下机器人的稳心高度,b为单体水下机器人浮力调节前所受浮力大小,μδb为上侧各单体水下机器人的浮力调节量。
16.所述步骤2包括:
17.根据重力平衡原理、浮力平衡原理,建立浮力调节量、调节后顶角大小与稳心高度的函数关系;调节并联三体水下机器人所构成等腰三角形的顶角大小,改变各单体相对位置来进一步调节其整体构型的稳心高度。
18.所述浮力调节量、调节后顶角大小与稳心高度的函数关系为:
[0019][0020]
其中,h
tfa
、和θ
ta
分别为并联三体水下机器人的顶角大小调节后稳心高度、顶角大小调节后新浮心纵坐标、顶角大小调节后新重心纵坐标和调节后顶角大小。
[0021]
所述条件包括:假设浮力调节前三体水下机器人中各单体的外形、重心均相同,且初始状态下重力等于浮力;假设单体水下机器人之间连接杆的重力与浮力忽略不计;假设并联三体水下机器人在运动中姿态保持水平;假设浮力调节过程中上侧两个单体浮力调节量相等,且总浮力保持不变。
[0022]
所述三体水下机器人并联的构型为等腰三角形,所述等腰三角形的腰两端的单体距离固定,等腰三角形顶角开合大小可调节。
[0023]
所述调节并联三体水下机器人各单体浮力,是通过调节各单体的浮力调节机构的排水量来实现的;
[0024]
所述等腰三角构型的顶角开合大小的调节,是通过输出指令控制顶点处单体旋转机构运动,实现对并联三体等腰三角构型的顶角大小调节。
[0025]
一种并联三体水下机器人稳心高度的调节装置,包括:处理部、存储部,存储部存储有程序,处理部加载程序执行如上所述的方法步骤,实现并联三体水下机器人稳心高度的调节。
[0026]
本发明具有以下有益效果及优点:
[0027]
1.通过调节并联三体水下机器人上下单体的浮力,在改变上下单体浮力差的情况下,实现了稳心高度的有效调节。
[0028]
2.在浮力调节的基础上,通过调节并联三体水下机器人所构成等腰三角形的顶角大小,实现了稳心高度的进一步调节。
[0029]
3.本发明能够实现浮力调节量、相对位置调节后顶角大小与稳心高度关系的连续描述。
[0030]
4.本发明能够为并联多体水下机器人自稳定性研究提供理论支撑。
附图说明
[0031]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点能够更加明显易懂:
[0032]
图1为本发明的方法流程图;
[0033]
图2为本发明的单体水下机器人中性浮力状态下的受力情况及稳心高度示意图;
[0034]
图3为本发明的单体中性浮力状态下并联三体水下机器人受力情况及稳心高度示意图;
[0035]
图4为本发明的通过浮力调节来调节并联三体水下机器人稳心高度示意图;
[0036]
图5为本发明的通过顶角大小调节来调节并联三体水下机器人稳心高度示意图。
[0037]
图6为本发明的方法所述的并联三体水下机器的顶角大小改变原理图;
具体实施方式
[0038]
下面结合具体实施例对本发明作进一步详述。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0039]
除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0040]
单体水下机器人可以近似的看作圆柱体,则在垂直方向上其浮心位于圆柱形的中心。单体水下机器人在水中通常处于中性浮力状态,其重心g与浮心b大小相等、方向相反,且在同一直线上。单体水下机器人中性浮力状态下的受力情况及稳心高度如图2所示,其中b、g分别为所受浮力与重力大小,hs为单体水下机器人的稳心高度。
[0041]
并联三体水下机器人(“倒三角”构型且左右对称)受力情况及稳心高度如图3所示,各单体被分别命名为auv1、auv2和auv3。图中,b1、b2、b3和bc分别为单体auv1、auv2、auv3和并联三体水下机器人的浮心,g1、g2、g3和gc分别为单体auv1、auv2、auv3和并联三体水下机器人的重心,l和l分别为并联三体水下机器人浮心或重心三角构型的底和腰长度,h
t
为并联三体水下机器人的稳心高度。此外,根据合力矩原理,在平面汇交力系中,合力对平面内任意一点的力矩,等于其所有分力对于同一点的力矩的代数和,推导后有hs=h
t
。
[0042]
并联多体水下机器人稳心高度的调节可采用上下单体浮力调节与等腰三角形顶角大小调节相结合后的方法。
[0043]
下面阐述通过上下单体浮力调节来调节稳心高度的原理。
[0044]
单体水下机器人浮力调节采用浮力调节机构改变各单体排水量从而改变浮力的方式,所以浮力调节后单体水下机器人垂直方向的重心与浮心位置不变,只是浮力大小发生变化。假设auv1与auv2浮力调节后的浮力变化均为μδb,其中δb为浮力调节量,μ为系数。为了使系统整体达到总浮力不变,auv3浮力调节后的浮力变化应为-2μδb。假设坐标系原点在auv3重心g3处,则b1与b2、g1与g2关于y轴对称。图4为通过浮力调节来调节并联三体水下机器人稳心高度示意图。图中,b
cf
为浮力调节后并联三体水下机器人的新浮心,h
tf
为浮力调节后并联三体水下机器人的稳心高度。
[0045]
定义
分别为b1、b2、b3、b
cf
、g1、g2、g3、gc在xoy平面上的坐标。根据合力矩原理,并联三体水下机器人的重心满足如下关系:
[0046][0047]
整理得
[0048][0049]
由于所以
[0050][0051]
同理,并联三体水下机器人的浮心满足如下关系:
[0052][0053]
整理得
[0054][0055]
由于所以
[0056][0057]
则浮力调节后并联三体水下机器人的稳心高度为
[0058][0059]
定义等腰三角形的顶角为θ
t
,又由于h
t
=hs,则有
[0060][0061]
上述公式(10)中,μδb待调节的参数,其他为可以获取的参量。通过改变并联三体
水下机器人各单体的浮力调节量μδb实现对稳心高度的调节。将μδb转换为排水或吸水指令输出给各单体上的浮力调节机构用于改变排水量从而改变浮力,各单体上的浮力调节机构采用申请号为201711366548.8,名称为“一种微小型水下机器人浮力调节系统”所述的浮力调节系统。
[0062]
如果仅仅通过改变μδb不能到达稳心高度要求,则在浮力调节的基础上,再通过构型变换机构调节等腰三角形的顶角大小,可实现稳心高度的进一步调节,下面阐述其原理。
[0063]
图5为通过等腰三角形的顶角大小调节来调节并联三体水下机器人稳心高度示意图。调节后,三角形腰长不变,仍为l,底边长度改变。图中,b
cfa
为角度调节后并联三体水下机器人的新浮心,g
ca
为角度调节后并联三体水下机器人的新重心,h
tfa
为角度调节后并联三体水下机器人的稳心高度。
[0064]
定义定义分别为角度调节后b1、b2、b3、b
cfa
、g1、g2、g3、g
ca
在xoy平面上的坐标。根据合力矩原理,并联三体水下机器人的重心在y轴方向满足如下关系:
[0065][0066]
整理得
[0067][0068]
同理,并联三体水下机器人的浮心在y轴方向满足如下关系:
[0069][0070]
整理得
[0071][0072]
则角度调节后并联三体水下机器人的稳心高度为
[0073][0074]
上述公式(15)中,θ
ta
为待调节的参数,μδb可由公式(10)获取,其他参量为可以获取的参量。因此,通过改变θ
ta
,能进一步实现对稳心高度的调节。如图6所示,为本发明的方法所述的并联三体水下机器的顶角大小改变原理图,θ
ta
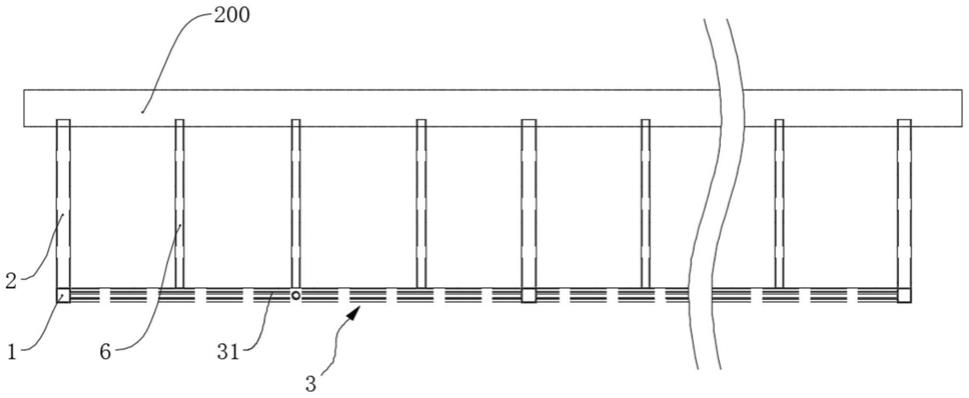
的调节是通过对顶点处单体中段的旋转机构转动来实现顶角的变化。auv1通过连接杆固定连接在顶点处单体auv3仓壁外,顶点处单体auv3中间舱段的旋转机构包括:单体auv3中段设有转盘,auv2通过连接杆固定连接在转盘上,转盘中心与单体auv3仓内的旋转电机输出轴端连接,控制器根据θ
ta
输出电机旋转指令控制旋转电机带动转盘转动,实现对并联三体等腰三角构型的顶角大小调节。本方法的函数关系计算过程中,假设顶角大小调节后各单体的重心与浮心依然在垂直方向上共线。
[0075]
以上所述仅为本发明的较佳实施例而已,并不用以限定本发明,对于本技术领域的技术人员来说,在不脱离本发明原理的前提下所作的任何修改、改进和等同替换等,均包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。