1.本实用新型涉及太阳能电池技术领域,具体为智能巡检机器人。
背景技术:
2.太阳能电池又称为“太阳能芯片”或“光电池”,是利用太阳光直接发电的光电半导体薄片,单体太阳能电池不能直接做电源使用,作电源必须将若干单体太阳能电池串、并联连接和严密封装成组件,太阳能板(也叫太阳能电池组件)多个太阳能电池片按组装的组装件,是太阳能发电系统中的核心部分,也是太阳能发电系统中最重要的部分。
3.在对太阳能板进行故障检测的过程中,常会用到智能巡检机器人,现有的智能巡检机器人不具有智能升降的功能,继而无法高效的对光伏板进行图像采集,最终影响对光伏板故障检测的效率,存在一定的弊端,无法满足使用者的需求,降低了智能巡检机器人的实用性。
技术实现要素:
4.本实用新型的目的在于提供智能巡检机器人,具备智能升降的优点,解决了现有的智能巡检机器人不具有智能升降的功能,继而无法高效的对光伏板进行图像采集,最终影响对光伏板故障检测的效率,存在一定的弊端,无法满足使用者的需求,降低了智能巡检机器人实用性的问题。
5.为实现上述目的,本实用新型提供如下技术方案:智能巡检机器人,包括传送车,所述传送车的顶部安装有安装组件,所述安装组件的内腔设置有调节组件,所述调节组件的顶部设置有限位组件,所述限位组件的顶部设置有安装板,所述传送车的左侧螺栓连接有防撞板,所述安装板的顶部固定安装有检测元件。
6.优选的,所述安装组件包括安装框体,所述安装框体右侧的中心处螺栓连接有伺服电机,所述伺服电机的输出端贯穿至安装框体的内腔并固定焊接有螺纹杆,所述螺纹杆表面的左侧贯穿设置有连接板一,所述螺纹杆表面的右侧贯穿设置有连接板二,所述连接板一和连接板二的正表面与背表面均固定焊接有引导板,所述安装框体内腔的前侧和后侧均横向固定焊接有滑杆。
7.优选的,所述螺纹杆的左侧通过轴承与安装框体内腔的左侧活动连接,所述连接板一的表面与螺纹杆的连接处通过轴承活动连接,所述连接板二的表面与螺纹杆的连接处螺纹连接。
8.优选的,所述调节组件包括基板一和基板二,所述基板一和基板二的数量均为两个,所述基板一的顶部通过转轴活动连接有上升板一,所述基板二的顶部通过轴承活动连接有上升板二。
9.优选的,所述上升板二的顶部通过转轴与安装板的底部活动连接,所述上升板一和上升板二相对一侧的中心处贯穿设置有转杆。
10.优选的,所述限位组件包括连接块,所述连接块的数量为两个,所述连接块的顶部
与安装板的底部固定焊接,两个连接块相对的一侧横向固定焊接有限位杆,所述限位杆的表面滑动套设有限位滑块。
11.优选的,所述安装板为agv小车,所述防撞板的左侧固定焊接有橡胶防撞条。
12.与现有技术相比,本实用新型的有益效果如下:
13.1、本实用新型通过设置安装框体、伺服电机、螺纹杆、连接板一、滑杆、引导板、连接板二、基板一、基板二、上升板一、上升板二、转杆、连接块、限位杆和限位滑块配合使用,解决了现有的智能巡检机器人不具有智能升降的功能,继而无法高效的对光伏板进行图像采集,最终影响对光伏板故障检测的效率,存在一定的弊端,无法满足使用者的需求,降低了智能巡检机器人实用性的问题。
14.2、本实用新型通过设置传送车为agv小车,能够使得传送车具备自动导航功能,且传送车可以沿规定的导航路线进行巡检,通过设置防撞板和橡胶防撞条配合使用,能够防止传送车与障碍物发生碰撞时,造成传送车的损坏,通过设置限位滑块,能够带动调节组件稳定移动,通过设置螺纹杆和连接板二配合使用,能够对基板二的位置进行调节。
附图说明
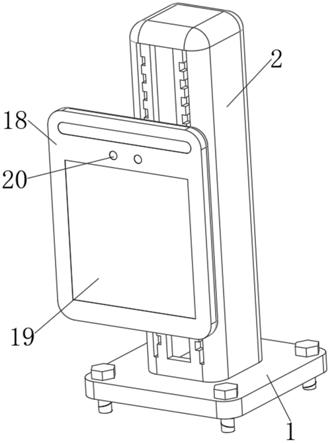
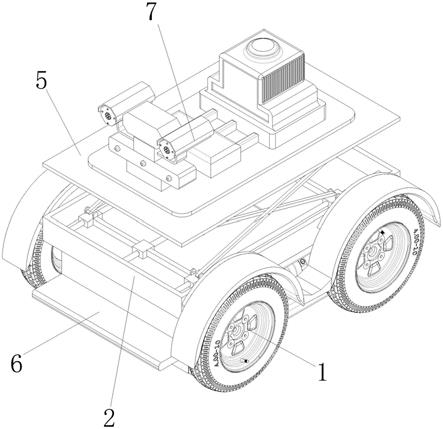
15.图1为本实用新型结构示意图;
16.图2为本实用新型安装组件结构立体示意图;
17.图3为本实用新型调节组件结构立体示意图;
18.图4为本实用新型限位组件结构立体示意图;
19.图5为本实用新型工作流程图。
20.图中:1传送车、2安装组件、21安装框体、22伺服电机、23螺纹杆、24连接板一、25滑杆、26引导板、27连接板二、3调节组件、31基板一、32基板二、33上升板一、34上升板二、35转杆、4限位组件、41连接块、42限位杆、43限位滑块、5安装板、6防撞板、7检测元件。
具体实施方式
21.请参阅图1-图5,智能巡检机器人,包括传送车1,传送车1的顶部安装有安装组件2,安装组件2的内腔设置有调节组件3,调节组件3的顶部设置有限位组件4,限位组件4的顶部设置有安装板5,传送车1的左侧螺栓连接有防撞板6,安装板5的顶部固定安装有检测元件7,安装组件2包括安装框体21,安装框体21右侧的中心处螺栓连接有伺服电机22,伺服电机22的输出端贯穿至安装框体21的内腔并固定焊接有螺纹杆23,螺纹杆23表面的左侧贯穿设置有连接板一24,螺纹杆23表面的右侧贯穿设置有连接板二27,连接板一24和连接板二27的正表面与背表面均固定焊接有引导板26,安装框体21内腔的前侧和后侧均横向固定焊接有滑杆25,螺纹杆23的左侧通过轴承与安装框体21内腔的左侧活动连接,连接板一24的表面与螺纹杆23的连接处通过轴承活动连接,连接板二27的表面与螺纹杆23的连接处螺纹连接,调节组件3包括基板一31和基板二32,基板一31和基板二32的数量均为两个,通过设置螺纹杆23和连接板二27配合使用,能够对基板二32的位置进行调节,基板一31的顶部通过转轴活动连接有上升板一33,基板二32的顶部通过轴承活动连接有上升板二34,基板一31和基板二32均活动套设于滑杆25的表面,上升板二34的顶部通过转轴与安装板5的底部活动连接,上升板一33和上升板二34相对一侧的中心处贯穿设置有转杆35,限位组件4包括
连接块41,连接块41的数量为两个,连接块41的顶部与安装板5的底部固定焊接,两个连接块41相对的一侧横向固定焊接有限位杆42,限位杆42的表面滑动套设有限位滑块43,限位滑块43的底部通过转轴与上升板一33的顶部活动连接,通过设置限位滑块43,能够带动调节组件3稳定移动,安装板5为agv小车,通过设置传送车1为agv小车,能够使得传送车1具备自动导航功能,且传送车1可以沿规定的导航路线进行巡检,防撞板6的左侧固定焊接有橡胶防撞条,通过设置防撞板6和橡胶防撞条配合使用,能够防止传送车1与障碍物发生碰撞时,造成传送车1的损坏。
22.使用时,在对安装板5的高度进行调节时,检测元件7能够控制伺服电机22工作,伺服电机22工作其输出端转动带动螺纹杆23转动,从而带动连接板二27左移,连接板二27左移通过引导板26带动基板二32左移,从而带动上升板二34的底部左移且上升板一33的顶部在限位杆42上向左滑动,继而带动安装板5进行上移,从而带动安装板5上的检测元件7上移至合适位置,即可完成对安装板5的高度进行调节工作,同时检测元件7对周围太阳板进行图像识别故障检测即可。
23.综上所述:该智能巡检机器人,通过设置安装框体21、伺服电机22、螺纹杆23、连接板一24、滑杆25、引导板26、连接板二27、基板一31、基板二32、上升板一33、上升板二34、转杆35、连接块41、限位杆42和限位滑块43配合使用,解决了现有的智能巡检机器人不具有智能升降的功能,继而无法高效的对光伏板进行图像采集,最终影响对光伏板故障检测的效率,存在一定的弊端,无法满足使用者的需求,降低了智能巡检机器人实用性的问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。