1.本技术涉及半导体制造技术领域,具体涉及一种曝光图形位置偏差的校正系统及校正方法。
背景技术:
2.光刻(photolithography)是半导体制造工业中的关键工艺,在光刻过程中,由于照明系统的光源持续照射掩模,随着时间累积,掩模会变得越来越热,基于热胀冷缩原理掩模会逐渐发生变形,出现图案放置误差,进而导致图案的曝光图形位置偏差增加。
3.在现有技术中,通过利用晶圆台上对位标记(fiducial mark的传感器,测量对位标记与掩模上对准标记(alignment mark)之间的位置偏差间接获得掩模变形的变化量,进而光刻机根据该变化量补偿掩模与晶圆之间的相对位置,达到曝光图形位置偏差的校正目的。
4.然而,晶圆台上设置的传感器在测量掩模变形的变化量期间,存在掩模要向传感器位置移动的问题,这样需要中断产品生产作业,对产品生产效率造成不良影响。
技术实现要素:
5.本技术的目的是针对上述现有技术的不足提出的一种曝光图形位置偏差的校正系统及校正方法,该目的是通过以下技术方案实现的。
6.本技术的第一方面提出了一种曝光图形位置偏差的校正系统,所述系统包括用于承载掩模的掩模台、用于承载晶圆的晶圆台以及用于控制所述掩模台和所述晶圆台扫描作业的扫描设备,其特征在于,还包括设置在有效曝光区域之外的激光器和第一传感器;所述激光器位于所述掩模台承载掩模的一侧,所述第一传感器位于所述掩模台承载掩模侧的相对侧,并且所述激光器和所述第一传感器位于垂直于掩模台表面的直线上;
7.在扫描曝光作业期间,所述激光器与所述第一传感器用于在进行掩模扫描过程中实时测量所述掩模的形变量,以由光刻机根据该形变量调整掩模与晶圆之间的相对位置。
8.本技术的第二方面提出了一种曝光图形位置偏差的校正方法,所述方法应用于上述第一方面所述的校正系统,所述方法包括:
9.在扫描曝光作业期间,激光器向掩模台表面方向发射激光;
10.当掩模移动至所述激光器下方时,第一传感器根据接收的激光检测所述掩模的形变量;
11.光刻机根据该形变量调整所述掩模与晶圆之间的相对位置。
12.基于上述第一方面和第二方面分别所述的曝光图形位置偏差的校正系统及校正方法,本技术具有如下有益效果:
13.在进行掩模扫描曝光过程中,当掩模随着掩模台的移动被移至激光器下方时,由于掩模上是图案的镂空结构,第一传感器会接收到穿过镂空结构的激光,并根据接收到的激光可以获得掩模的形变量。从而在保证不中断生产的条件下,激光器和第一传感器可以
在掩模扫描过程中实时测量得到掩模的形变量,光刻机能够根据实时测量的形变量调整掩模与晶圆之间的相对位置,即达到了校正曝光图形位置偏差的目的,也提升了产品生产效率。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
15.图1为本技术示出的一种掩模持续被加热导致曝光图形位置偏差的示意图;
16.图2为本技术示出的一种现有技术中在晶圆台上设置传感器的示意图;
17.图3为本技术根据一示例性实施例示出的一种曝光图形位置偏差的校正系统结构示意图;
18.图4为本技术根据图3所示实施例示出的另一种曝光图形位置偏差的校正系统结构示意图
19.图5为本技术根据一示例性实施例示出的一种曝光图形位置偏差的校正方法的实施例流程图。
具体实施方式
20.以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。
21.在附图中示出了根据本公开实施例的各种结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状以及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
22.在本公开的上下文中,当将一层/元件称作位于另一层/元件“上”时,该层/元件可以直接位于该另一层/元件上,或者它们之间可以存在居中层/元件。另外,如果在一种朝向中一层/元件位于另一层/元件“上”,那么当调转朝向时,该层/元件可以位于该另一层/元件“下”。
23.参见图1所示,在曝光过程中,照明系统的光源持续照射掩模,基于热胀冷缩的原理掩模逐渐发生变形,造成掩模上图案转移到晶圆上后,出现图案位置放置误差,进而导致图案的套刻偏移增加。
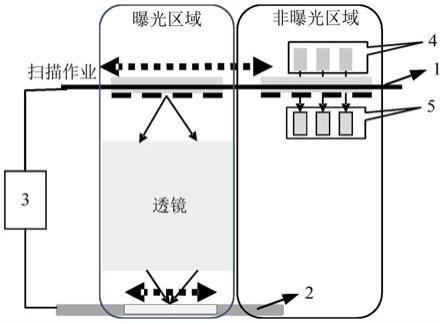
24.在现有技术中,参见图2所示,在晶圆台的生产区域之外设置有一个对位标记的传感器,在传统方案中该传感器用来利用对位标记的位置校准光刻机,目前通过用该传感器测量对位标记与掩模上对准标记之间的位置偏差间接获得掩模变形的变化量,来补偿掩模与晶圆之间的相对位置,减少套刻偏移误差。
25.然而,对位标记和传感器均位于生产区域之外(即聚光透镜外面)的晶圆台上,传感器在测量位置偏差时,需要中断生产后,将掩模向传感器位置移动,这样就会存在生产能力下降的问题。
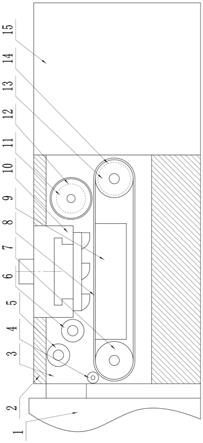
26.为解决上述技术问题,本技术提出一种改进的曝光图形位置偏差的校正系统,参见图3所示,该校正系统包括掩模台1、晶圆台2以及扫描设备3,掩模台1上承载有掩模,晶圆台2上承载有晶圆,在扫描曝光作业期间,扫描设备3用于控制掩模台1和晶圆台2进行扫描作业,以将掩模上的图案转移到晶圆上。
27.本技术与现有技术的区别在于,该校正系统还包括设置在有效曝光区域之外(聚光透镜与晶圆和掩模对应的区域)的激光器4和第一传感器5,具体地,激光器4是位于掩模台1承载掩模的一侧(即掩模台1的上方),其发射的激光的方向为朝向掩模台1的表面方向,第一传感器5是位于掩模台1承载掩模的相对侧(即掩模台1的下方),并且激光器4和第一传感器5始终位于垂直于掩模台1表面的直线上。
28.其中,在进行掩模扫描曝光过程中,当掩模随着掩模台1的移动被移至激光器4下方时,由于掩模上是图案的镂空结构,第一传感器5会接收到穿过镂空结构的激光,从而第一传感器5根据接收到的激光可以获得掩模的形变量。
29.由此可见,在保证不中断生产的条件下,激光器4和第一传感器5可以在进行掩模扫描过程中实时测量得到掩模的形变量,从而光刻机根据测量的形变量可以调整掩模与晶圆之间的相对位置,即达到了校正曝光图形位置偏差的目的,也提升了产品生产效率。
30.在一种具体实施例中,激光器4和第一传感器5可以在进行掩模扫描过程中实时测量掩模上对准标记的位置偏差,进而根据对准标记的位置偏差间接获得掩模的形变量。
31.其中,在使用掩模上对准标记的位置获得掩模的形变量时,在扫描曝光作业前,第一传感器5需要获取到掩模加热前的对准标记的初始位置,从而,在扫描曝光作业期间,测量到掩模加热后的对准标记的位置时,可以将测量得到的位置与初始位置比较,得到掩模加热前和加热后对准标记的位置偏差,进而获得掩模加热前和加热后的形变量。
32.在另一种具体实施例中,激光器4和第一传感器5也可以在进行掩模扫描过程中实时测量掩模上图案的位置偏差,进而根据图案的位置偏差获得掩模的形变量。
33.其中,在使用掩模上图案的位置获得掩模的形变量时,在扫描曝光作业前,第一传感器5需要获取到掩模加热前的图案的初始位置,从而在扫描曝光作业期间,测量到掩模加热后的图案的位置时,可以将测量得到的位置与初始位置比较,得到掩模加热前和加热后图案的位置偏差,进而获得掩模加热前和加热后的形变量。
34.需要说明的是,由于在扫描曝光作业期间,掩模是随着掩模台1扫描移动,为了激光器4和第一传感器5能够准确测量掩模的形变量,需要激光器4和第一传感器5随着掩模一起移动测量形变量。
35.基于此,参见图4所示,该校正系统还可以包括设置在激光器4周围的第二传感器6,在激光器4移动测量过程中始终校正激光器4位置变动的误差,以避免激光器4的位置发生错误。
36.下面以具体实施例详细阐述上述图3和图4所示实施例示出的曝光图形位置偏差的校正系统的校正方案。
37.图5为本技术根据一示例性实施例示出的一种曝光图形位置偏差的校正方法的实施例流程图,如图5所示,该曝光图形位置偏差的校正方法包括如下步骤:
38.步骤501:在扫描曝光作业期间,激光器向掩模台表面方向发射激光。
39.其中,在进行掩模扫描曝光过程中,激光器向掩模台表面方向发射激光,当掩模移
动至激光器下方时,第一传感器便会接收到穿过掩模的激光。
40.步骤502:当掩模移动至所述激光器下方时,,第一传感器根据接收的激光检测掩模的形变量。
41.可以理解的是,通常掩模上设置有图案和对准标记,因此第一传感器既可以通过测量图案的位置偏差得到掩模形变量,也可以通过测量对准标记的位置偏差得到掩模形变量。
42.在一些实施例中,针对通过测量对准标记的位置偏差得到掩模形变量的过程,在扫描曝光作业前,第一传感器需要获取掩模上对准标记的初始位置,可以理解的是,对准标记的初始位置即为掩模被加热前的位置。
43.从而,第一传感器根据接收的激光检测掩模的形变量时,可以根据接收的激光检测掩模被加热后对准标记的位置,进而根据掩模加热前的初始位置和加热后的位置获得对准标记的位置偏差,并根据该位置偏差获得掩模的形变量。
44.在另一些实施例中,针对通过测量图案的位置偏差得到掩模形变量的过程,在扫描曝光作业前,第一传感器需要获取掩模上图案的初始位置,可以理解的是,图案的初始位置即为掩模被加热前的位置。
45.从而,第一传感器根据接收的激光检测掩模的形变量时,可以根据接收的激光检测掩模被加热后图案的位置,进而根据掩模加热前的初始位置和加热后的位置获得图案的位置偏差,并根据该位置偏差获得掩模的形变量。
46.步骤503:光刻机根据该形变量调整掩模与晶圆之间的相对位置。
47.需要说明的是,当第一传感器接收到透过掩模的激光时,为了激光器和第一传感器能够准确测量掩模的形变量,激光器和第一传感器可以随着掩模一起移动,来测量掩模的形变量。
48.基于此,第二传感器可以在激光器移动测量过程中始终校正激光器位置变动的误差,以避免激光器的位置发生错误。
49.至此,完成上述图5所示的校正流程,在进行掩模扫描曝光过程中,当掩模随着掩模台的移动被移至激光器下方时,由于掩模上是图案的镂空结构,第一传感器会接收到穿过镂空结构的激光,并根据接收到的激光可以获得掩模的形变量。从而在保证不中断生产的条件下,激光器和第一传感器可以在掩模扫描过程中实时测量得到掩模的形变量,光刻机能够根据实时测量的形变量补偿掩模与晶圆之间的相对位置,即达到了校正曝光图形位置偏差的目的,也提升了产品生产效率。
50.在以上的描述中,对于各层的构图、刻蚀等技术细节并没有做出详细的说明。但是本领域技术人员应当理解,可以通过各种技术手段,来形成所需形状的层、区域等。另外,为了形成同一结构,本领域技术人员还可以设计出与以上描述的方法并不完全相同的方法。另外,尽管在以上分别描述了各实施例,但是这并不意味着各个实施例中的措施不能有利地结合使用。
51.以上对本公开的实施例进行了描述。但是,这些实施例仅仅是为了说明的目的,而并非为了限制本公开的范围。本公开的范围由所附权利要求及其等价物限定。不脱离本公开的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本公开的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。