1.本公开涉及农业管理分析技术领域,具体地,涉及一种农作物监测系统。
背景技术:
2.据统计,我国农作物病虫害呈多发、重发态势,每年受害农作物面积达近70亿亩次,粮食损失四千万余吨,经济作物损失三百五十余亿斤。严重损害了农户的利益,造成了巨额的经济损失。由此可以认识到农作物病虫害是粮食安全的主要威胁之一,但由于必要的基础设施、专业人员、专业知识的缺乏,在我国的许多地方,想要快速识别检测病虫害及之后的对农田的统筹管理工作仍然是非常难以实现的。目前,传统农业一般以人力劳作为主,依靠植保人员在田间地头的实地调查,虽然这种方法具有一定的真实性,但是却费时费力,准确程度和检测覆盖率都要依靠相关人员的专业水平、经验和责任心。近年来,随着智慧农业技术的发展,通常采用在农田中安装大量传感器的方法对农作物的生长情况以及是否有病虫害进行监测,但是上述方法需要大量的传感器且传输数据较为复杂,造成人力和物力的浪费,且农民往往不能及时了解到农作物的健康状况,无法精准科学地针对农作物使用农药,导致农药使用过度对环境和人类的健康产生了威胁。
技术实现要素:
3.为克服相关技术中存在的问题,本实用新型公开提供一种农作物监测系统,所述系统包括:电子设备、实时采集农作物的生长环境数据和植株图像的巡检机器人、对所述生长环境数据和植株图像进行分析并获取所述农作物的植物长势信息和病虫害信息的服务器,所述服务器分别与所述巡检机器人和电子设备通信连接;
4.所述巡检机器人的机身上设置有实时采集所述农作物的生长环境数据的温湿度传感器、二氧化碳浓度传感器、光照传感器、压强传感器、风速传感器和雨滴传感器,实时采集所述农作物的植株图像的摄像头,监测所述巡检机器人与农作物或障碍物之间距离的距离传感器;
5.所述巡检机器人的内部设置有根据所述巡检机器人与农作物或障碍物之间距离控制所述巡检机器人移动方向和移动速度的微处理器,所述微处理器与所述距离传感器电连接;
6.所述服务器的内部设置有对所述生长环境数据和植株图像进行分析并获取所述农作物的植物长势信息和病虫害信息的深度学习芯片;
7.所述电子设备上设置有实时显示所述农作物的植物长势信息和病虫害信息的显示单元。
8.可选的,所述巡检机器人的内部设置有:单片机和树莓派;
9.所述单片机分别与所述温湿度传感器、二氧化碳浓度传感器、光照传感器、压强传感器、风速传感器和雨滴传感器电连接,以将所述农作物的生长环境数据发送至所述服务器;
10.所述树莓派与所述摄像头电连接,以控制所述摄像头实时采集所述农作物的植株图像并将所述植株图像发送至所述服务器。
11.可选的,所述系统还包括:wifi模块,所述wifi模块分别与所述单片机和树莓派通信连接;
12.所述单片机通过所述wifi模块与所述服务器通信连接并向所述服务器发送所述农作物的生长环境数据;
13.所述树莓派通过所述wifi模块与所述服务器通信连接并向所述服务器发送所述农作物的植株图像。
14.可选的,所述树莓派与所述摄像头通过usb连接。
15.可选的,所述电子设备包括以下至少一者:个人电脑、工作站、笔记本电脑、智能手机、平板电脑、智能电视、智能手表和个人数字助理。
16.可选的,所述巡检机器人的底板上设置有四轮行走装置。
17.可选的,所述巡检机器人的底板上还设置有驱动电机和蓄电池;
18.所述蓄电池与所述驱动电机相连并向所述驱动电机供电;
19.所述驱动电机与所述四轮行走装置相连并驱动所述四轮行走装置按照所述微处理器指示的移动方向和移动速度进行移动。
20.可选的,所述巡检机器人的机身上还设置有防止所述巡检机器人碰撞的防撞固定组件。
21.可选的,所述摄像头采用hd720型号的ccd摄像头。
22.可选的,所述摄像头的光轴与竖直方向之间形成的锐角夹角为60
°
。
23.综上所述,本实用新型公开涉及一种农作物监测系统,该系统包括:电子设备、巡检机器人、服务器,该服务器分别与巡检机器人和电子设备连接;巡检机器人的机身上设置有温湿度传感器、二氧化碳浓度传感器、光照传感器、压强传感器、风速传感器和雨滴传感器、摄像头和距离传感器;巡检机器人内部设置有微处理器,该微处理器与距离传感器连接;该服务器内部设置有深度学习芯片;该电子设备上设置有显示单元。通过在可移动机器人上安装的传感器实时采集农作物信息,省去了在农田中安装大量传感器的成本,另外通过深度学习芯片对农作物信息进行分析获取植物长势信息和病虫害信息,提高了分析结果的准确性,同时也为用户通过电子设备查看农作物信息和分析结果提供了方便。
24.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
25.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
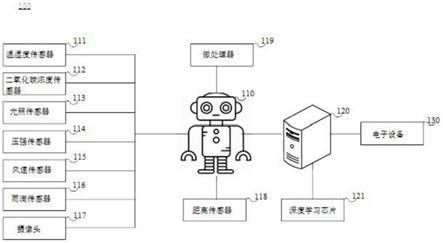
26.图1是根据一示例性实施例示出的一种农作物监测系统的结构示意图;
27.图2是根据图1示出的另一种农作物监测系统的结构示意图。
具体实施方式
28.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
29.图1是根据一示例性实施例示出的一种农作物监测系统的结构示意图,如图1所示,该系统100包括:实时采集农作物的生长环境数据和植株图像的巡检机器人110、对该生长环境数据和植株图像进行分析并获取该农作物的植物长势信息和病虫害信息的服务器120和电子设备130,该服务器120分别与该巡检机器人110和电子设备130通信连接;该巡检机器人110的机身上设置有实时采集该农作物的生长环境数据的温湿度传感器111、二氧化碳浓度传感器112、光照传感器113、压强传感器114、风速传感器115和雨滴传感器116,实时采集该农作物的植株图像的摄像头117,监测该巡检机器人110与农作物或障碍物之间距离的距离传感器118;该巡检机器人110的内部设置有根据该巡检机器人110与农作物或障碍物之间距离控制该巡检机器人110移动方向和移动速度的微处理器119,该微处理器119与该距离传感器118电连接;该服务器120的内部设置有对该生长环境数据和植株图像进行分析并获取该农作物的植物长势信息和病虫害信息的深度学习芯片121;该电子设备130上设置有实时显示该农作物的植物长势信息和病虫害信息的显示单元。
30.其中,该电子设备130包括以下至少一者:个人电脑、工作站、笔记本电脑、智能手机、平板电脑、智能电视、智能手表和个人数字助理。
31.示例地,该巡检机器人110能够在农田中定期巡视,以达到通过巡检机器人110上安装的各种传感器采集农作物的生长环境数据以及通过摄像头117采集农作物的植株图像的目的。以小麦为例,巡检机器人110分别在小麦的营养生长期、营养生长和生殖生长并进期以及生殖生长期三个生长时期在农田间进行巡视,从而采集小麦三个生长时期的生长环境数据和植株图像。巡检机器人110将采集到的生长环境数据和植株图像发送至服务器120中,该服务器120内部设置有深度学习芯片121,用于对接收到的生长环境数据进行分析,建立农作物的生长环境数据与植物长势信息之间的关系模型,从而确定该农作物的植物长势信息,以及,对接收到的植株图像进行深度学习处理,从而识别该农作物的病虫害信息,确定是否有病虫害以及病虫害种类。
32.需要说明的是,通过深度学习芯片121对生长环境数据进行分析的具体过程包括:前期采集大量的生长环境数据与植物长势信息样本,并通过上述样本对学习机进行训练,得到训练好的生长环境数据与植物长势信息之间的机器学习模型,如此,当该深度学习芯片121再接收到农作物的生长环境数据时,直接将生长环境数据输入该训练好的机器学习模型,得到农作物的植物长势信息。通过深度学习芯片121对植株图像进行深度学习处理,从而识别该农作物的病虫害信息的具体过程包括:利用深度学习处理技术对拍摄到的植株图像进行处理,通过微调vgg网络模型实现了自然条件下农田中多种病虫害的自动识别,然后对比迁移学习和训练全新网络两种方法,同时分析训练测试集的分布比例对分类效果的影响。通过大量实验发现,与传统机器学习方法相比,用深度学习处理技术识别植物病虫害可以大幅提升结果的准确率,同时还发现预训练模型和较大的训练测试集分布比例会有更好的效果。
33.可以理解的是,获取农作物的植物长势信息和病虫害信息后,用户端的电子设备130通过显示单元对上述信息进行显示,使用户能够及时获取农作物的生长情况(植物长势信息和病虫害信息)以根据生长情况及时、准确地对农作物进行施肥和喷洒农药,防止农药使用过度对环境和人类的健康产生了威胁。
34.另外,该摄像头117采用hd720型号的ccd摄像头,采用防抖动设计,该摄像头117的
光轴与竖直方向之间形成的锐角夹角为60
°
,俯拍拍摄形成800万像素的jpfg图像。需要说明的是,通常情况下,摄像头117在巡检机器人110巡视过程中采集到的植株图像中会存在噪声干扰,降低病虫害信息识别的准确性,因此,在对植株图像进行识别之前需要进行去噪处理,本实用新型公开实施例中采用的是5
×
5中值滤波处理方法。
35.另外,该巡检机器人110上设置有距离传感器120,用于实时向巡检机器人110行进的道路前方发送超声波以及接收遇到障碍物或农作物后返回的超声波,通过微处理器119根据超声波返回的时间计算巡检机器人110与障碍物或农作物之间的距离并控制巡检机器人110的移动方向和移动速度,以实现自动避障的功能。
36.图2是根据图1示出的另一种农作物监测系统的结构示意图,如图2所示,该巡检机器人110的内部设置有:单片机140和树莓派150;该单片机140分别与该温湿度传感器111、二氧化碳浓度传感器112、光照传感器113、压强传感器114、风速传感器115和雨滴传感器116电连接,以将该农作物的生长环境数据发送至该服务器120;该树莓派150与该摄像头117电连接,以控制该摄像头117实时采集该农作物的植株图像并将该植株图像发送至该服务器120。该树莓派150与该摄像头117通过usb连接。
37.示例地,通过与巡检机器人110相连的各种传感器采集到温湿度、光照信息、co2浓度、压强、风速和降雨量信息(即生长环境数据)后,通过单片机140对上述生长环境数据进行处理并发送至服务器120。
38.树莓派(raspberry pi,简称rpi)是一款基于arm的微型电脑主板,本实用新型公开实施例中采用3代b 型号的开发板与摄像头117通过usb连接后使用网线连接到电脑上,通过ip扫描器扫描到树莓派ip,通过远程桌面连接进入树莓派界面,在界面中设置自启动和驱动摄像头,以及对发送服务器的端口号和ip地址进行设置,将树莓派上电后,摄像头117完成定时采集植株图像并将植株图像发送到指定的服务器120中。
39.另外,该系统还包括:wifi模块160,该wifi模块160分别与该单片机140和树莓派150通信连接;该单片机140通过该wifi模块160与该服务器120通信连接并向该服务器120发送该农作物的生长环境数据;该树莓派150通过该wifi模块160与该服务器120通信连接并向该服务器120发送该农作物的植株图像。
40.示例地,与单片机140和树莓派150通信连接的wifi模块160可将生长环境数据和植株图像发送至网关,网关再将包含生长环境数据和植株图像的wifi数据发送至服务器。本实用新型公开实施例中,采用esp8266串口的wifi模块,通过对ip地址和端口号进行设置,然后将数据发送至服务器。采用wifi技术将数据直接传输到服务器中,无需经过中转节点。
41.另外,该巡检机器人的底板上设置有四轮行走装置,该巡检机器人的底板上还设置有驱动电机和蓄电池;该蓄电池与该驱动电机相连并向该驱动电机供电;该驱动电机与该四轮行走装置相连并驱动该四轮行走装置按照该微处理器指示的移动方向和移动速度进行移动。该巡检机器人的机身上还设置有防止该巡检机器人碰撞的防撞固定组件。
42.示例地,考虑到农田中特殊的地理环境,本实用新型公开实施例中采用设置有四轮行走装置的巡检机器人,同时采用蓄电池为驱动四轮行走装置的驱动电机供电,能够减少巡检机器人在农田间翻车的概率。另外,巡检机器人的机身上设置有防撞固定组件,能够在与障碍物撞击时保护该巡检机器人,降低损坏率,节约生产成本。
43.综上所述,本实用新型公开涉及一种农作物监测系统,该系统包括:电子设备、巡检机器人、服务器,该服务器分别与巡检机器人和电子设备连接;巡检机器人的机身上设置有温湿度传感器、二氧化碳浓度传感器、光照传感器、压强传感器、风速传感器和雨滴传感器、摄像头和距离传感器;巡检机器人内部设置有微处理器,该微处理器与距离传感器连接;该服务器内部设置有深度学习芯片;该电子设备上设置有显示单元。通过在可移动机器人上安装的传感器实时采集农作物信息,省去了在农田中安装大量传感器的成本,另外通过深度学习芯片对农作物信息进行分析获取植物长势信息和病虫害信息,提高了分析结果的准确性,同时也为用户通过电子设备查看农作物信息和分析结果提供了方便。
44.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
45.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
46.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
