1.本发明涉及一种展示平台,尤其是一种机器人的展示平台及其展示系统。
背景技术:
2.目前对机器人功能的展示,主要是在其相应的场景内,让机器人运行,展示其功能。不同的机器人的展示场景是不同的。比如,清扫机器人展示自动清扫时,会让其在地面上清扫垃圾,消毒机器人会让其在室内、通道等较易拥挤环境进行喷洒消毒;楼宇服务机器人会让其在楼宇不同楼层内穿梭。
3.当企业要展示这些机器人,但又不能在相应的场景内展示,就需要搭建场景,而有的场景是能在有限空间内搭建的,有些环境很难在有限空间内搭建,比如楼宇内环境。因为楼宇内涉及多个楼层和电梯。
4.因此需要有楼宇内的展示系统及展示平台,用于展示楼宇内运行的机器人。
技术实现要素:
5.本发明的目的在于提供一种机器人展示平台及展示系统,用于展示楼宇内运行的机器人的功能。
6.本发明是通过以下技术方案来实现的:一种机器人展示平台,包括:自主移动机器人及升降展示台;所述升降展示台具有:第一基座、升降主体、升降台、第二基座、控制模块、显示模块、交互模块、升降通信模块;所述升降主体固定连接所述升降台,所述升降主体的下部嵌入所述第一基座中,所述升降主体的上部穿设所述第二基座;所述显示系统至少包括第一显示装置,用于显示升降主体控制的升降台的位置信息;所述交互装置提供用于与展示平台进行控制的交互;所述控制装置控制所述升降展示台搭载所述自主移动机器人进行升降,且控制所述自主移动机器人进出所述升降展示台,并通过所述显示模块展示所述自主移动机器人及升降展示台的运行状态和通过所述交互模块与用户进行交互。
7.优选地,所述升降主体包括:剪刀叉升降机、箱体及门体;所述升降台固定在所述剪刀叉升降机上,所述剪刀叉升降机位于箱体内,所述门体可开合的连接于所述箱体。
8.优选地,所述机器人展示平台还包括安装于所述升降主体内的图像采集装置及处理装置,所述图像采集装置将所述升降主体内的空间栅格化处理后,判断栅格被障碍物占据的比例,当所述比例是否大于预设值,当所述比例大于预设值,所述控制模块控制所述自主移动机器人等待,不移动至所述升降主体内的升降台上;反之,所述控制模块控制所述自主移动机器人移动至所述升降主体内的升降台上。
9.优选地,所述显示系统还包括:第二显示装置。所述第一显示装置用于显示升降主体所在位置的信息;第二显示装置,用于显示升降空间内占用率。
10.优选地,所述交互模块提供用于与展示平台进行控制的交互;可通过交互模块向展示平台发送乘坐指令,展示平台的控制模块将控制升降台升降来实现该请求优选地,还具有充电装置,所述充电装置供所述自主移动机器人充电。自动移动机器人在电量低于预设后,自行移动至所述充电装置充电,所述充电装置分布于第一基座和第二基座上。
11.机器人展示平台的展示方法,包括以下步骤:自主移动机器人移动至距离所述升降展示台一定预设范围内,向所述升降展示台发送升降请求;升降展示台获取该请求,获得该请求从升降展示平台发出的位置,从而获取自主移动机器人所在位置;升降展示台控制升降主体至该位置,判断升降主体内空间是否能够容纳所述自主移动机器人;如能够容纳所述自主移动机器人,则发送允许乘坐指令给所述自主移动机器人;所述自主移动机器人获取乘坐指令后,进入所述升降主体内,并调整其位于升降主体内的位置;当所述升降主体到达自主移动机器人的升降请求所需要到达的位置后停止,使所述自主移动机器人驶出所述升降主体;如不能够容纳所述自主移动机器人,则发送不允许乘坐指令给所述自主移动机器人;所述自主移动机器人在原地等待允许乘坐指令。
12.交互系统在接受自主移动机器人的无线交互指令的同时,还接受乘客通过控制按键发出的交互指令。
13.所述乘客通过控制按键发出乘梯指令后,控制系统获取所述乘客所在的位置,并判断升降主体内的空间是否大于预设的载客值,如所述升降主体内的空间大于所述载客值,所述控制系统将所述升降主体移动至乘客所在位置,并让乘客进入;如所述升降主体内的空间小于所述预设的载客值,则让所述乘梯指令等待。
14.本发明的优点在于,1、结构简单;通过简易结构实现机器人上下电梯的展示;2、展示体验感强;用户可直观观察及亲身体验与机器人一起上下电梯的感觉;3、人性化的交互方法;与机器人通过多种方式进行交互,非常人性化。
附图说明
15.图1为本发明实施例的模块连接示意图;图2为本发明实施例的展示平台的结构示意图示意图;图3为本发明实施例的升降主体的结构示意图。
16.图中:100、自主移动机器人;200、展示平台控制系统;1、电源模块;2、机器人控制模块;3、驱动模块;4、传感器;5、通信模块;6、交互模块、7、显示模块;8、识别模块;9、控制模块;10、升降通信模块;11、第一基座;12、升降主体;13、第二基座;14、第一显示装置;15、第二显示装置;16、剪刀叉升降机;17、箱体;18、门体;19、升降台。
具体实施方式
17.下面详细描述本技术,本技术的实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的部件或具有相同或类似功能的部件。此外,如果已知技术的详细描述对于示出的本技术的特征是不必要的,则将其省略。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能解释为对本技术的限制。
18.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本技术所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
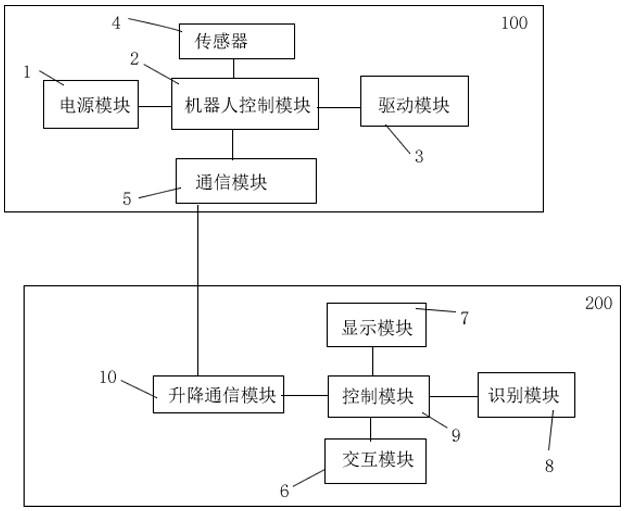
19.如图1-2所示,自主移动机器人100包括:电源模块1、机器人控制模块2、驱动模块3、传感器4、通信模块5;所述电源模块、驱动模块、传感器及通信模块与机器人控制模块连接。所述传感器包括:激光雷达传感器、双目识别传感器、红外线传感器、超声波传感器及imu。所述激光雷达传感器分布在自主移动机器人外壳的前方及后方,用于检测自主移动机器人前方及后方的障碍物,所述双目识别传感器安装于自主移动机器人外壳的前方,用于识别自主移动机器人前方的环境,并通过机器人控制模块的计算,对环境中的信息做标识,所述红外线传感器和超声波传感器分布于自主移动机器人外壳周围,用于检测自主移动机器人周围的物体,所述imu嵌入在自主移动机器人内部,用于确定自主移动机器人航向及航速。
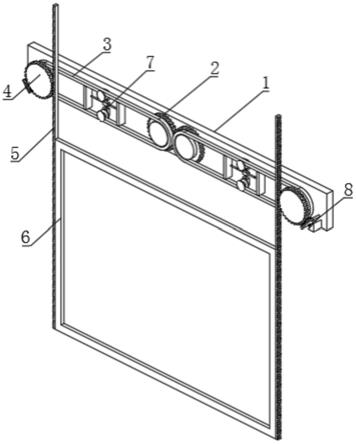
20.机器人展示平台包括:升降展示台、展示平台控制系统;所述展示平台控制系统200,包括:交互模块6、显示模块7、识别模块8、控制模块9、升降通信模块10;所述升降展示台包括:第一基座11、升降主体12、升降台、第二基座13;所述升降主体固定连接所述升降台,所述升降主体的下部嵌入所述第一基座中,所述升降主体的上部穿设所述第二基座;所述显示模块至少包括第一显示装置14,用于显示升降主体控制的升降台的位置信息;即第一显示装置可显示升降台目前与第一基座还是第二基座在同一水平线,本实施例中,所述第一显示装置为显示屏。
21.所述交互模块提供用于与展示平台进行控制的交互;可通过交互模块向展示平台发送乘坐指令,展示平台的控制模块将控制升降台升降来实现该请求。
22.所述控制模块控制所述升降展示台搭载所述自主移动机器人进行升降,且控制所述自主移动机器人进出所述升降展示台,并通过所述第一显示装置展示所述自主移动机器人及升降展示台的运行状态和通过所述交互模块与用户进行交互。
23.如图3所示,所述升降主体包括:剪刀叉升降机16、箱体17及门体18;所述升降台19固定在所述剪刀叉升降机上,所述剪刀叉升降机位于箱体内,所述门体可开合的连接于所述箱体。当然剪刀叉升降机也可以用其他升降机替代,比如液压顶升升降机。
24.再次参照图2所示,所述显示模块还包括:第二显示装置15,用于显示升降主体内空间的占用率。当升降主体内空间占用率在一个预设区间内吗,自主移动机器人会正常的进入升降主体内,当升降主体内空间占用率低于一个预设的区间内,则自主移动机器人会
在升降主体外等候。
25.所述交互模块主要包括自主移动机器人通过通信模块与控制模块交互的第一交互系统及通过控制按键与交互模块交互的第二交互系统。
26.再次参考图2,所述第一基座与第二基座上分布机器人充电座,自主移动机器人在电量低于一定预设值后,会寻找最近的机器人充电座自行充电。
27.机器人展示平台的展示方法,包括以下步骤:自主移动机器人移动至距离所述升降展示台一定预设范围内,向所述升降展示台发送升降请求;升降展示台获取该请求,获得该请求从升降展示平台发出的位置,从而获取自主移动机器人所在位置;升降展示台控制升降主体至该位置,判断升降主体内空间是否能够容纳所述自主移动机器人;如能够容纳所述自主移动机器人,则发送允许乘坐指令给所述自主移动机器人;所述自主移动机器人获取乘坐指令后,进入所述升降主体内,并调整其位于升降主体内的位置;当所述升降主体到达自主移动机器人的升降请求所需要到达的位置后停止,使所述自主移动机器人驶出所述升降主体;如不能够容纳所述自主移动机器人,则发送不允许乘坐指令给所述自主移动机器人;所述自主移动机器人在原地等待允许乘坐指令。
28.交互模块在接受自主移动机器人的无线交互指令的同时,还接受乘客通过控制按键发出的交互指令。
29.所述乘客通过控制按键发出乘梯指令后,控制模块获取所述乘客所在的位置,并判断升降主体内的空间是否大于预设的载客值,如所述升降主体内的空间大于所述载客值,所述控制模块将所述升降主体移动至乘客所在位置,并让乘客进入;如所述升降主体内的空间小于所述预设的载客值,则让所述乘梯指令等待。
30.机器人展示平台的展示方法,包括以下步骤:自主移动机器人移动至距离所述升降展示台一定预设范围内,向所述升降展示台发送升降请求;升降展示台获取该请求,获得该请求从升降展示平台发出的位置,从而获取自主移动机器人所在位置;升降展示台控制升降主体至该位置,判断升降主体内空间是否能够容纳所述自主移动机器人;如能够容纳所述自主移动机器人,则发送允许乘坐指令给所述自主移动机器人;所述自主移动机器人获取乘坐指令后,进入所述升降主体内,并调整其位于升降主体内的位置;当所述升降主体到达自主移动机器人的升降请求所需要到达的位置后停止,使所述自主移动机器人驶出所述升降主体;如不能够容纳所述自主移动机器人,则发送不允许乘坐指令给所述自主移动机器人;所述自主移动机器人在原地等待允许乘坐指令。
31.交互系统在接受自主移动机器人的无线交互指令的同时,还接受乘客通过控制按键发出的交互指令。
32.所述乘客通过控制按键发出乘梯指令后,控制系统获取所述乘客所在的位置,并判断升降主体内的空间是否大于预设的载客值,如所述升降主体内的空间大于所述载客值,所述控制系统将所述升降主体移动至乘客所在位置,并让乘客进入;如所述升降主体内的空间小于所述预设的载客值,则让所述乘梯指令等待。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。