1.本技术涉及输送皮带异常检测技术领域,尤其涉及一种皮带撕裂检测方法和系统。
背景技术:
2.带式输送是港口、矿山、火电厂、物流、仓储等行业采用的重要的输送方式,而皮带是带式输送方式重要的组成部分。但是,由于输送物含有杂质(如矿物含有铁器)、包装要求(采用铁丝扎捆)等原因,经常造成输送皮带撕裂,包括纵向撕裂和横线撕裂,如果不能及时发现,会造成巨大的经济损失,同时会大大影响生产效率。为了解决这一技术难题,国内外专家研究了很多种皮带撕裂检测技术,例如冲击检测法(检测皮带介质中冲击力传播),托辊异常受力检测法(分析托辊异常受力情况),超声波检测法(检测皮带介质中超声波传播),压敏电阻检测法(检测皮带下方漏料),传感器嵌入检测法(皮带中嵌入导电橡胶、光导纤维)等方法。以上皮带撕裂检测方法在现场应用中,对皮带撕裂检测的精度存在着缺陷,且安装、维护较为复杂,成本较高。
3.近些年激光测量方法在国内外各行各业已逐渐得到广泛应用,目前测量方式主要为单点测量,即每次只能测量皮带的一个区域,不能完全解决传送带的撕裂检测问题,速度较慢,无法满足实时在线检测的需求。
技术实现要素:
4.本技术提供了一种皮带撕裂检测方法和系统,能够实时在线监测皮带传输情况,保证了对传输皮带的多点测量和连续测量,大大提高了检测速度和精度,确保可以在输送皮带发生撕裂后能够及时检测出故障,防止输送皮带撕裂事故的扩大化,避免了安全事故的发生,降低了企业的经济损失。
5.第一方面,提供了一种皮带撕裂检测方法,应用于皮带撕裂检测系统中,所述系统包括激光源和取像装置,所述激光源用于将激光投射到皮带表面形成激光线,所述取像装置用于采集被激光投射后的皮带表面图像,并生成第一图像数据,所述方法包括:
6.对所述第一图像数据进行预处理,从而获取目标图像数据,所述目标图像数据的尺寸小于所述第一图像数据的尺寸,所述目标图像数据的像素区域包括激光线所占的像素区域;
7.获取所述目标图像数据的像素区域中激光线像素区域的边缘坐标;
8.根据所述激光线像素区域的边缘坐标确定皮带是否撕裂。
9.可选地,所述根据所述激光线像素区域的边缘坐标确定皮带是否撕裂包括:
10.根据所述激光线像素区域每一行的左边缘的边缘坐标和右边缘的边缘坐标确定该行的激光线宽度;
11.根据每一行的激光线宽度确定皮带是否撕裂。
12.可选地,所述根据每一行的激光线宽度确定皮带是否撕裂包括:
13.将每一行的激光线宽度与第一阈值比较;
14.若激光线宽度大于所述第一阈值,则确定该行激光线像素区域对应的皮带区域发生撕裂;
15.否则,则确定该行激光线像素区域对应的皮带区域没有发生撕裂。
16.可选地,所述根据每一行的激光线宽度确定皮带是否撕裂包括:
17.计算相邻行的激光线宽度的差值;
18.若所述差值的绝对值大于第二阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;
19.否则,则确定该相邻行的激光线像素区域对应的皮带区域没有发生撕裂。
20.可选地,所述根据所述激光线像素区域的边缘坐标确定皮带是否撕裂包括:
21.计算所述激光线像素区域处于同一侧的相邻行边缘坐标的差值;
22.若所述差值的绝对值大于第三阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;
23.否则,则确定该相邻行的激光线像素区域对应的皮带区域没有发生撕裂。
24.可选地,所述获取所述目标图像数据的像素区域中激光线像素区域的边缘坐标包括:
25.获取所述目标图像数据的像素区域中激光线像素区域亚像素边缘的边缘坐标。
26.可选地,所述对所述第一图像数据进行预处理,从而获取目标图像数据,包括:
27.对所述第一图像数据进行平滑处理得到第二图像数据;
28.对所述第二图像数据进行阈值分割,以获取激光线像素区域;
29.对所述激光线像素区域进行膨胀,并确定膨胀后激光线像素区域的位置和大小;
30.从所述第二图像数据裁剪目标图像数据,所述目标图像数据像素区域的位置和大小与所述膨胀后激光线像素区域的位置和大小相同。
31.可选地,所述方法还包括:
32.若皮带发生撕裂,则发出第一信号,所述第一信号用于报警或使所述皮带的传输装置停机。
33.第二方面,提供了一种皮带撕裂检测系统,包括:
34.激光源,所述激光源用于将激光投射到皮带表面形成激光线;
35.取像装置,所述取像装置用于采集被激光投射后的皮带表面图像,并生成第一图像数据;
36.第一模块,用于对所述第一图像数据进行预处理,从而获取目标图像数据,所述目标图像数据的尺寸小于所述第一图像数据的尺寸,所述目标图像数据的像素区域包括激光线所占的像素区域;
37.第二模块,用于获取所述目标图像数据的像素区域中激光线像素区域的边缘坐标;
38.第三模块,用于根据所述激光线像素区域的边缘坐标确定皮带是否撕裂。
39.可选地,所述根据所述激光线像素区域的边缘坐标确定皮带是否撕裂包括:
40.根据所述激光线像素区域每一行的左边缘的边缘坐标和右边缘的边缘坐标确定该行的激光线宽度;
41.根据每一行的激光线宽度确定皮带是否撕裂。
42.可选地,所述根据每一行的激光线宽度确定皮带是否撕裂包括:
43.将每一行的激光线宽度与第一阈值比较;
44.若激光线宽度大于所述第一阈值,则确定该行激光线像素区域对应的皮带区域发生撕裂;
45.否则,则确定该行激光线像素区域对应的皮带区域没有发生撕裂。
46.可选地,所述根据每一行的激光线宽度确定皮带是否撕裂包括:
47.计算相邻行的激光线宽度的差值;
48.若所述差值的绝对值大于第二阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;
49.否则,则确定该相邻行的激光线像素区域对应的皮带区域没有发生撕裂。
50.可选地,所述根据所述激光线像素区域的边缘坐标确定皮带是否撕裂包括:
51.计算所述激光线像素区域处于同一侧的相邻行边缘坐标的差值;
52.若所述差值的绝对值大于第三阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;
53.否则,则确定该相邻行的激光线像素区域对应的皮带区域没有发生撕裂。
54.可选地,所述获取所述目标图像数据的像素区域中激光线像素区域的边缘坐标包括:
55.获取所述目标图像数据的像素区域中激光线像素区域亚像素边缘的边缘坐标。
56.可选地,所述对所述第一图像数据进行预处理,从而获取目标图像数据,包括:
57.对所述第一图像数据进行平滑处理得到第二图像数据;
58.对所述第二图像数据进行阈值分割,以获取激光线像素区域;
59.对所述激光线像素区域进行膨胀,并确定膨胀后激光线像素区域的位置和大小;
60.从所述第二图像数据裁剪目标图像数据,所述目标图像数据像素区域的位置和大小与所述膨胀后激光线像素区域的位置和大小相同。
61.可选地,所述系统还包括第四模块:
62.若皮带发生撕裂,则所述第四模块发出第一信号,所述第一信号用于报警或使所述皮带的传输装置停机。
63.第三方面,提供一种计算机存储介质,所述计算机存储介质中存储有计算机可执行指令,所述计算机可执行指令用于执行上述第一方面及其任一种可实施方式中所述的皮带撕裂检测方法。
64.采用上述方法,激光源实时发射激光光束,当光束遇到传送带后,会呈一定角度进行发射,而取像装置则实时捕捉激光光束的反射光。前端处理设备获取图像信息后对第一图像数据进行预处理,获取的目标图像数据的尺寸小于该第一图像数据的尺寸,该目标图像数据的像素区域包括激光线所占的像素区域。这样能够减少冗余数据,进一步定位激光线区域,提升激光线图像的检测分析速度。然后根据激光线区域的边缘坐标信息实时判断输送皮带表面的撕裂情况。另外,还能够实时分析图像上的所有激光线区域,可以实现皮带运行速度4m/s的无卡顿检测要求,保证了对输送皮带的多点测量和连续测量,大大提高了检测速度和精度,确保可以在输送皮带发生撕裂后能够及时检测出故障,防止输送皮带撕
裂事故的扩大化,避免了安全事故的发生,降低了企业的经济损失。
附图说明
65.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
66.图1是根据一些实施例提供的一种皮带撕裂检测方法流程示意图;
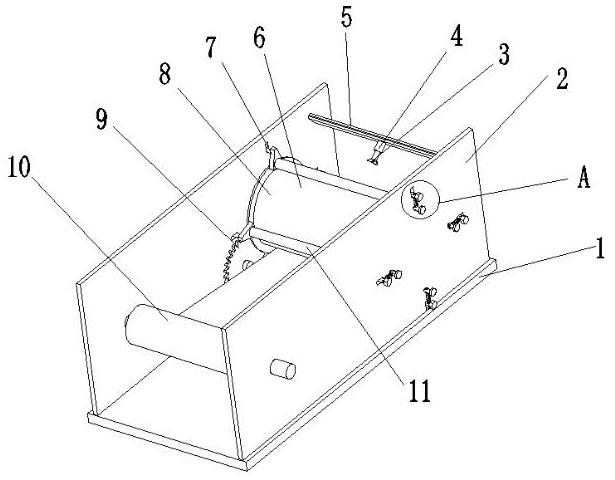
67.图2是根据一些实施例提供的一种皮带撕裂检测系统示意图;
68.图3是本技术提供的激光线区域的示例图。
具体实施方式
69.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能解释为对本技术的限制。
70.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本技术的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
71.图1是根据一些实施例提供的一种皮带撕裂检测方法流程示意图,图2是根据一些实施例提供的一种皮带撕裂检测系统示意图,下面结合图1和图2对该方法进行说明。
72.如图2所示,该皮带撕裂检测系统包括激光源和取像装置,激光源用于将激光投射到皮带表面形成激光线,取像装置用于采集被激光投射后的皮带表面图像,并生成第一图像数据。
73.取像装置包括工业相机和相对应的工业镜头,取像装置将第一图像数据发送给前端处理设备,前端处理设备使用皮带撕裂检测方法对第一图像数据进行分析,从而判断皮带是否撕裂。
74.需要说明的是,激光源可以是如图2所示的两个(激光源1和激光源2),两个激光源的位置如图2所示,分布在皮带上方的两侧,这样能够覆盖皮带每一行的全部区域,也可以是一个,放在皮带的正上方,本技术对此不作限定。同理,当有两个激光源的时候,则需要两个取像装置(取像装置1和取像装置2)与其分别对应,当有一个激光源的时候,则需要一个取像装置。
75.在该系统基础上,该方法包括以下步骤:
76.步骤s1,对第一图像数据进行预处理,从而获取目标图像数据,目标图像数据的尺寸小于第一图像数据的尺寸,目标图像数据的像素区域包括激光线所占的像素区域。
77.通过对第一图像数据进行预处理,来提取包括激光线像素区域的目标图像数据的像素区域,由于目标图像数据的尺寸小于第一图像数据的尺寸,从而能够减少冗余数据,提
升检测速度。
78.在一个示例中,可以对第一图像数据进行以下方法的预处理:
79.s1a,对第一图像数据进行平滑处理得到第二图像数据。由于港口工作的环境恶劣、粉尘较多、光线不稳定,工业相机采集的皮带原图片会有许多噪声,影响系统检测的可靠性,因此可进行平滑处理来去除噪声。
80.可选地,采用均值滤波的方式对第一图像数据进行平滑处理。例如,借助模板对图像进行邻域操作来去除噪声,在待处理的数字图像中从左到右,从上到下逐点地移动模板,进行图像平滑处理。均值滤波的原理是依次将图像中某一像素的灰度值同它周围的m-1个像素的灰度值相加,然后求出这m个像素值的平均值,作为新图该像素的灰度值,最终求出目标图像的所有点的像素值。例如,如果模板大小为3*3,那么m为8。在本技术实验中,采用核为11*11大小的滤波核。
81.s1b,对第二图像数据进行阈值分割,以获取激光线像素区域。
82.由于激光线和背景区域特征差异较大,阈值分割可以将激光线像素区域和背景像素区域分割开来更利于后续的处理。例如,图3是本技术提供的激光线像素区域的示例图,如图3所示,阈值分割后的图像中,激光线像素区域的像素采用白色像素,背景像素区域的像素采用黑色像素。本技术实验中,阈值分割中的阈值设为100。
83.s1c,对激光线像素区域进行膨胀,并确定膨胀后激光线像素区域的位置和大小。
84.通过对激光线像素区域进行“加粗”,获取更大的可用于检测的激光线像素区域,便于后续的操作,减小检测难度。需要说明的是,膨胀算法的相关参数可根据实际需要设定,本技术对此不作限定。例如,膨胀所选取的核大小为11*11。
85.s1d,从第二图像数据裁剪目标图像数据。
86.其中,该目标图像数据像素区域的位置和大小与膨胀后激光线像素区域的位置和大小相同。
87.从第二图像数据上依照膨胀后激光线像素区域的位置和大小裁剪具有相同位置和大小的目标图像数据像素区域,不仅能够减少要分析的数据量,提升检测速度,还有助于后续确定激光线像素区域的亚像素边缘。
88.由于工业相机分辨率较高,故采集到的图像的分辨率是非常大的,通过对原图像预处理,消除了图像的冗余区域,从而减少待操作图像的大小,以提高图像处理的速度。在本技术实验中,图像像素尺寸可由2592
×
2048变为480
×
2048。
89.步骤s2,获取目标图像数据的像素区域中的激光线像素区域的边缘坐标。
90.边缘坐标指的是激光线像素区域中,每一行的最左边像素的坐标和/或该行的最右边像素的坐标。像素的坐标对应的坐标系根据实际需要设置即可。本技术对边缘坐标是以像素为单位还是以长度为单位不作限定。
91.需要说明的是,行与行之间的距离可以间隔一个像素,也可以间隔多个像素,或者不间隔像素,本技术对此不作限定。
92.在一种可能的实施方式中,该边缘坐标为目标图像数据的像素区域中激光线像素区域亚像素边缘坐标。
93.通过对每行激光线进行亚像素边缘的查找,能够获取更高精度的边缘,提升后续操作的精度。
94.如图3所示,激光线像素区域为白色像素区域,每一行的左边缘的边缘坐标为从图像左侧开始的第一个白色像素的坐标,每一行的右边缘的边缘坐标为从图像右侧开始的第一个白色像素的坐标。
95.步骤s3,根据激光线像素区域的边缘坐标确定皮带是否撕裂。
96.在一种可能的实施方式中,根据激光线像素区域每一行的左边缘的边缘坐标和右边缘的边缘坐标确定该行的激光线宽度,然后根据每一行的激光线宽度确定皮带是否撕裂。
97.在实验中发现,如果皮带有撕裂情况,激光线会发生变化,皮带断裂比较大激光线会断裂,皮带断裂较小,激光线会移位并变宽,因此根据激光线的宽度可以判断皮带是否撕裂。
98.在一个示例中,根据每一行的激光线宽度确定皮带是否撕裂的方法可以是:
99.将每一行的激光线宽度与第一阈值比较,若激光线宽度大于第一阈值,则确定该行激光线像素区域对应的皮带区域发生撕裂;否则,则确定该行激光线像素区域对应的皮带区域没有发生撕裂。
100.第一阈值可以根据实际需求设定,或者根据实验统计的值,本技术对此不作限定。例如如图3所示,设定第一阈值为20像素,a行的左边缘的边缘坐标(x,y)为(125,125)(单位为像素),右边缘的边缘坐标(x,y)为(140,125),那么该行激光线宽度为140-125=15,15小于20,因此该行激光线像素区域对应的皮带区域没有发生撕裂。
101.在一个示例中,根据每一行的激光线宽度确定皮带是否撕裂的方法可以是:
102.计算相邻行的激光线宽度的差值;若差值的绝对值大于第二阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;否则,则确定该相邻行的激光线像素区域对应的皮带区域没有发生撕裂。
103.可选地,该相邻行的激光线像素区域指的是该相邻行中任一行的激光线像素区域,或者,
104.该相邻行中的所有行的激光线像素区域,或者,
105.该相邻行中的所有行的激光线像素区域及其中间所夹的激光线像素区域,该情况对应于相邻行之间的间隔大于或等于1个像素,或者,
106.该相邻行中任一行的激光线像素区域及其相邻行中间所夹的激光线像素区域,该情况对应于相邻行之间的间隔大于或等于1个像素。
107.第二阈值可以根据实际需求设定,或者根据实验统计的值,本技术对此不作限定。例如,如图3所示,设定第二阈值为5像素,a行的参数参见上述举例,b行的左边缘的边缘坐标(x,y)为(142,110)(单位为像素),右边缘的边缘坐标(x,y)为(165,110),那么该行激光线宽度为165-142=23,a行和b行的激光线像素区域的宽度差为23-15=8,8大于5,因此,a行激光线像素区域、b行激光线像素区域以及两个区域的中间部分对应的皮带区域发生了撕裂。
108.在一种可能的实施方式中,根据激光线像素区域的边缘坐标确定皮带是否撕裂包括:
109.计算激光线像素区域处于同一侧的相邻行边缘坐标的差值;若差值的绝对值大于第三阈值,则确定该相邻行的激光线像素区域对应的皮带区域发生撕裂;否则,则确定该相
邻行的激光线像素区域对应的皮带区域没有发生撕裂。
110.其中,相邻行的激光线像素区域的说明参见上述举例,在此不再赘述。
111.第三阈值可以根据实际需求设定,或者根据实验统计的值,本技术对此不作限定。例如,设定第三阈值10,a行左侧的边缘坐标为125,b行左侧的边缘坐标为142,差值为142-125=17,17大于10,因此该相邻行的激光线像素区域对应的皮带区域发生撕裂。
112.在一种可能的实施方式中,该方法还包括:
113.步骤s4,若皮带发生撕裂,则发出第一信号,第一信号用于报警或使所述皮带的传输装置停机。
114.具体地,若皮带发生撕裂,则前端处理设备向皮带传输装置发送第一信号,若第一信号用于报警,则引起工作人员注意皮带情况,若第一信号用于使皮带传输装置停机,则可及时停止皮带的传输,方便工作人员检查和维修。
115.在一种可能的实施方式中,根据使用情况可将取像装置的纵向视野调整至原视野的1/10,故最高帧率变为原帧率的10倍。该方式通过把原图像区域中不包含激光线的区域使用相机设置裁剪掉,减少处理区域,同时增加了目标区域的数据量,可提高后续图像处理速度。例如,本技术实验使用的工业镜头原视野时的帧率为60帧/s,调整视野后,帧率变为600帧/s。
116.采用上述方法,激光源实时发射激光光束,当光束遇到传送带后,会呈一定角度进行发射,而取像装置则实时捕捉激光光束的反射光,前端处理设备获取图像信息后根据激光线区域的边缘坐标信息实时判断输送皮带表面的撕裂情况。另外,还能够实时分析图像上的所有激光线区域,可以实现皮带运行速度4m/s的无卡顿检测要求,保证了对输送皮带的多点测量和连续测量,大大提高了检测速度和精度,确保可以在输送皮带发生撕裂后能够及时检测出故障,防止输送皮带撕裂事故的扩大化,避免了安全事故的发生,降低了企业的经济损失。进一步地,根据每一行激光线区域的宽度或相邻行激光线区域同侧的边缘坐标,更加精确判断输送皮带表面的撕裂情况;以及,通过对原图像进行预处理,筛选激光线区域,减少冗余数据量,能够提高运算速度;另外,利用亚像素边缘查找算法,可以提高边缘的检测精度。
117.上述多点测量指的是,对激光线像素区域的每一行进行测量,同时检测多个点,即可同时检测传输皮带上的多个点。
118.以图3为例,在上述皮带撕裂检测方法的基础上,本技术还提出了一种皮带撕裂检测系统,该系统包括:
119.激光源,激光源用于将激光投射到皮带表面形成激光线;
120.取像装置,取像装置用于采集被激光投射后的皮带表面图像,并生成第一图像数据;
121.第一模块,用于对第一图像数据进行预处理,从而获取目标图像数据,目标图像数据的尺寸小于第一图像数据的尺寸,目标图像数据的像素区域包括激光线所占的像素区域;
122.第二模块,用于获取目标图像数据的像素区域中激光线像素区域的边缘坐标;
123.第三模块,用于根据激光线像素区域的边缘坐标确定皮带是否撕裂。
124.可选地,第一模块、第二模块和第三模块可集成到如图3所示的前端处理设备中。
125.其他实现方式参见上述皮带撕裂检测方法中的说明,在此不再赘述。
126.应该理解的是,虽然附图的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,附图的流程图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
127.以上所述仅是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。