1.本发明属于目标识别技术领域,具体涉及一种适用于指挥态势图的箭头定位方法及系统。
背景技术:
2.目前,基于gis的指挥调度系统被广泛应用于应急、消防、智慧城市等多个业务领域。基于gis的指挥调度系统对各类突发事件现场的指挥作业人员进行跟踪、定位,实现可视化远程指挥调度,在城市治理、应急救援等方面发挥了重要的作用。但目前的指挥调度系统在传输指挥态势图时,需要传输图片文件,而当遇到接收方网络条件较差的情况,如在山区、林区等信号覆盖不佳的条件下,传输往往需要耗费大量时间。
3.目前市场上的主流的gis指挥调度系统只能够传输传统的指挥态势图片文件,无法提取指挥图片中的结构化语义文字,所需传输数据量较大。因此实有必要提出一种箭头定位方法,识别箭头所指起点和终点坐标,从而提取出态势图中的指挥结构化语义并输出成文字来起到压缩数据量的作用。
技术实现要素:
4.针对于上述现有技术的不足,本发明的目的在于提供一种适用于指挥态势图的箭头定位方法及系统,以解决现有技术中gis指挥调度系统只能够传输传统的指挥态势图片文件,无法提取指挥图片中的结构化语义文字,所需传输数据量较大的问题。本发明使用基于深度神经网络的目标识别算法,对指挥态势图中的箭头覆盖范围进行检测,再通过消失点算法计算得出箭头的起点和指向点坐标,从而提取出指挥态势图中的语义信息,起到压缩传输数据量的作用。
5.为达到上述目的,本发明采用的技术方案如下:
6.本发明的一种适用于指挥态势图的箭头定位方法,步骤如下:
7.1)获取gis指挥态势图片中箭头的位置;
8.2)利用消失点检测算法计算得出箭头的起点和终点坐标。
9.进一步地,所述步骤1)具体包括:
10.11)获取gis指挥态势图像,通过高斯滤波对获取的图像进行预处理,消除存在的图像噪声;
11.12)将预处理后得到的图像输入到训练好的深度学习检测模型中,以获得图片中箭头所在的像素区域和大小。
12.进一步地,所述步骤2)具体包括:
13.21)将得到的箭头所在的像素区域切片,并使用霍夫变换边缘检测算法得到边缘图片;
14.22)采用消失点检测算法对所述边缘图片进行计算,得到箭头的尖端两个边缘线段直线方程y1,y2,以及箭头终点;其中,y1:a1x b1y c1=0,y2:a2x b2y c2=0,a、b为变量参
数,c为常数;
15.23)根据两个边缘线段直线方程y1和y2及角平分线方程公式(a1x b1y c1)
±
λ(a2x a2y c2)=0,求得角平分线y3,y4;
16.24)分别计算y3,y4与步骤12)中获取的箭头所在像素区域的交点,根据交点计算两条角平分线与箭头所在像素区域重叠部分的长度,选择重叠部分长的角平分线作为后续计算的输入;再计算所述重叠部分长的角平分线与箭头所在像素区域重叠部分的两个交点与箭头终点的距离,选择距离最远的作为箭头的起点。
17.进一步地,所述消失点检测算法具体为:
18.221)使用霍夫变换检测出直线片段,并将接近的线段合并成一条线段;
19.222)将合并后的所有线段按照极坐标排序,与相邻角度接近的线段求所在直线的交点做为候选点;
20.223)所有线段对所有候选点投票,投票方式为计算线段终点到指定点的直线和原线段的夹角θ,投票值为|l|为线段长度,u为鲁棒性参数,e为自然对数函数底数;
21.224)对投票后的候选点做层次聚类,聚类结束条件为最小距离大于一定像素;对于每个聚类计算票数加权重心,作为新的候选点;票数为聚类中所有候选点的票数之和;
22.225)选择票数最高的聚类,作为输出点(即箭头终点),该输出点为步骤221)中检测出的直线片段中的两条直线的交点,所述的两条直线为箭头尖端的边缘线段。
23.本发明的一种适用于指挥态势图的箭头定位系统,包括:
24.位置获取模块,用于获取gis指挥态势图片中箭头的位置;
25.计算模块,用于利用消失点检测算法计算得出箭头的起点和终点坐标。
26.本发明的有益效果:
27.本发明可利用知识图谱等相关技术对完成定位的箭头符号进行语义转换,将态势图信息转换为文本语义信息,大大降低了指挥态势图传输的数据量,提高传输效率。
附图说明
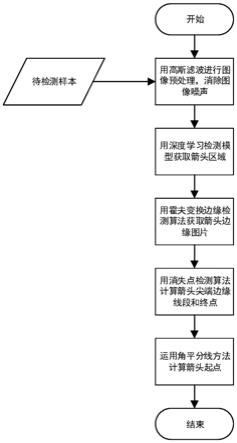
28.图1为本发明方法的流程图。
具体实施方式
29.为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
30.参照图1所示,本发明的一种适用于指挥态势图的箭头定位方法,步骤如下:
31.1)获取gis指挥态势图片中箭头的位置;
32.其中,所述步骤1)具体包括:
33.11)获取6is指挥态势图像,通过高斯滤波对获取的图像进行预处理,消除存在的图像噪声;
34.12)将预处理后得到的图像输入到训练好的深度学习检测模型中,以获得图片中
箭头所在的像素区域(x坐标和y坐标)和大小(h高度和w宽度)。
35.2)利用消失点检测算法计算得出箭头的起点和终点坐标;
36.其中,所述步骤2)具体包括:
37.21)将得到的箭头所在的像素区域切片,并使用霍夫变换边缘检测算法得到边缘图片;
38.22)采用消失点检测算法对所述边缘图片进行计算,得到箭头的尖端两个边缘线段直线方程y1,y2,以及箭头终点;其中,y1:a1x b1y c1=0,y2:a2x b2y c2=0,a、b为变量参数,c为常数;
39.23)根据两个边缘线段直线方程y1和y2及角平分线方程公式(a1x b1y c1)
±
λ(a2x a2y c2)=0,求得角平分线y3,y4;
40.24)分别计算y3,y4与步骤12)中获取的箭头所在像素区域的交点,根据交点计算两条角平分线与箭头所在像素区域重叠部分的长度,选择重叠部分长的角平分线作为后续计算的输入;再计算所述重叠部分长的角平分线与箭头所在像素区域重叠部分的两个交点与箭头终点的距离,选择距离最远的作为箭头的起点。
41.具体地,所述消失点检测算法具体为:
42.221)使用霍夫变换检测出直线片段,并将接近的线段合并成一条线段;
43.222)将合并后的所有线段按照极坐标排序,与相邻角度接近的线段求所在直线的交点做为候选点;
44.223)所有线段对所有候选点投票,投票方式为计算线段终点到指定点的直线和原线段的夹角θ,投票值为|l|为线段长度,u为鲁棒性参数,e为自然对数函数底数;
45.224)对投票后的候选点做层次聚类,聚类结束条件为最小距离大于一定像素;对于每个聚类计算票数加权重心,作为新的候选点;票数为聚类中所有候选点的票数之和;
46.225)选择票数最高的聚类,作为输出点(即箭头终点),该输出点为步骤221)中检测出的直线片段中的两条直线的交点,所述的两条直线为箭头尖端的边缘线段。
47.本发明的一种适用于指挥态势图的箭头定位系统,包括:
48.位置获取模块,用于获取gis指挥态势图片中箭头的位置;
49.计算模块,用于利用消失点检测算法计算得出箭头的起点和终点坐标。
50.本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。