技术特征:
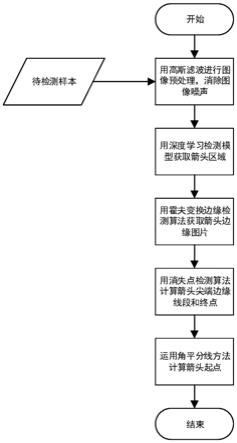
1.一种适用于指挥态势图的箭头定位方法,其特征在于,步骤如下:1)获取gis指挥态势图片中箭头的位置;2)利用消失点检测算法计算得出箭头的起点和终点坐标。2.根据权利要求1所述的适用于指挥态势图的箭头定位方法,其特征在于,所述步骤1)具体包括:11)获取gis指挥态势图像,通过高斯滤波对获取的图像进行预处理,消除存在的图像噪声;12)将预处理后得到的图像输入到训练好的深度学习检测模型中,以获得图片中箭头所在的像素区域和大小。3.根据权利要求2所述的适用于指挥态势图的箭头定位方法,其特征在于,所述步骤2)具体包括:21)将得到的箭头所在的像素区域切片,并使用霍夫变换边缘检测算法得到边缘图片;22)采用消失点检测算法对所述边缘图片进行计算,得到箭头的尖端两个边缘线段直线方程y1,y2,以及箭头终点;其中,y1:a1x b1y c1=0,y2:a2x b2y x2=0,a、b为变量参数,c为常数;23)根据两个边缘线段直线方程y1和y2及角平分线方程公式(a1x b1y c1)
±
λ(a2x a2y c2)=0,求得角平分线y3,y4;24)分别计算y3,y4与步骤12)中获取的箭头所在像素区域的交点,根据交点计算两条角平分线与箭头所在像素区域重叠部分的长度,选择重叠部分长的角平分线作为后续计算的输入;再计算所述重叠部分长的角平分线与箭头所在像素区域重叠部分的两个交点与箭头终点的距离,选择距离最远的作为箭头的起点。4.根据权利要求3所述的适用于指挥态势图的箭头定位方法,其特征在于,所述消失点检测算法具体为:221)使用霍夫变换检测出直线片段,并将接近的线段合并成一条线段;222)将合并后的所有线段按照极坐标排序,与相邻角度接近的线段求所在直线的交点做为候选点;223)所有线段对所有候选点投票,投票方式为计算线段终点到指定点的直线和原线段的夹角θ,投票值为|l|为线段长度,u为鲁棒性参数,e为自然对数函数底数;224)对投票后的候选点做层次聚类,聚类结束条件为最小距离大于一定像素;对于每个聚类计算票数加权重心,作为新的候选点;票数为聚类中所有候选点的票数之和;225)选择票数最高的聚类,作为输出点,该输出点为所述步骤221)中检测出的直线片段中的两条直线的交点,所述的两条直线为箭头尖端的边缘线段。5.一种适用于指挥态势图的箭头定位系统,其特征在于,包括:位置获取模块,用于获取gis指挥态势图片中箭头的位置;计算模块,用于利用消失点检测算法计算得出箭头的起点和终点坐标。
技术总结
本发明公开了一种适用于指挥态势图的箭头定位方法及系统,步骤如下:1)获取GIS指挥态势图片中箭头的位置;2)利用消失点检测算法计算得出箭头的起点和终点坐标。本发明可利用知识图谱等相关技术对完成定位的箭头符号进行语义转换,将态势图信息转换为文本语义信息,大大降低了指挥态势图传输的数据量,提高传输效率。效率。效率。
技术研发人员:李国玲 唐皋 高文昀 戴胜 吴晓亮 张叶 屠陈樑 严欢 赵新跃
受保护的技术使用者:南京莱斯信息技术股份有限公司
技术研发日:2021.11.22
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。