一种融合行人拥挤度的ped-d-a*寻径算法
技术领域
1.本发明属于视频行为识别领域,具体涉及一种基于改进双流卷积神经网络的视频不安全行为识别方法。
背景技术:
2.传统的a*算法具有很多缺陷,由于其在规划路径的过程中会遍历很多中间节点,导致其搜索效率不高。此外,传统a*算法得到的最优路径一般贴近障碍物,这不利于人们进行实际的动态避障工作。为了提升a*算法效率,同时使最优路径能够远离障碍物干扰,现有技术中的基于maklink图的a*算法,该算法得到的最优路径长度往往大于传统a*算法得到的最优路径的长度,该算法遍历寻径场景的格点数要远小于传统a*算法,且该算法的运算时间也远小于传统a*算法,该算法在算法时长、算法效率以及行人安全度方面都有一定的优势,但其只考虑了选取最优路径的距离与运动安全方面的因素,并没有考虑到最优路径上的行人密度相关因素。如果行人都选择该算法给出的最优路径进行逃生,则该路径的行人密度会过大而严重影响后续行人的疏散,反而会降低整体行人疏散效率并且增加行人疏散的安全隐患。
技术实现要素:
3.针对现有技术存在的不足,本发明目的是提供一种融合行人拥挤度的ped-d-a*寻径算法,该算法将行人密度因素加入算法的考虑范围,即在选择最优路径时除了优先考虑路径的距离最优之外,还要考虑该路径的行人密度,当某条最优路径的行人密度过大严重影响行人疏散时,选择重新寻找另一条最优路径进行疏散,这样才能使算法得出的最优路径最有利于行人疏散。
4.为了实现上述目的,本发明是通过如下的技术方案来实现:
5.一种融合行人拥挤度的ped-d-a*寻径算法,包括以下步骤:
6.(1)建立二维寻径场景;
7.(2)确定寻径场景中的寻径起点和终点;
8.(3)对寻径场景建立开放式链接,并绘制最优开放式链接;
9.(4)根据开放式链接构建maklink图;
10.(5)对maklink图执行a*寻径算法,得到寻径平面中寻径起点到达寻径终点的最优路径;
11.(6)综合分析各条路径的人群密度以及行人的通过时间,计算每个行人智能体当前时刻的最优疏散路径;
12.(7)根据得到的基于每个行人智能体的当前最优疏散路径,对该寻径场景的最优疏散路径进行实时规划。
13.本发明的有益效果:
14.本发明创新性地提出了一种融合行人拥挤度的ped-d-a*寻径算法,该算法将行人
密度因素加入算法的考虑范围,即在选择最优路径时除了优先考虑路径的距离最优之外,还要考虑该路径的行人密度,当某条最优路径的行人密度过大严重影响行人疏散时,选择重新寻找另一条最优路径进行疏散,这样才能使算法得出的最优路径最有利于行人疏散。
附图说明
15.图1为wsp模拟方法中场景建模图;
16.图2为开放式多变区域示意图;
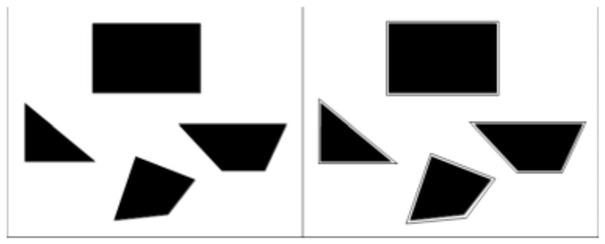
17.图3为开放式链接与最佳开放式链接示意图;
18.图4为寻径场景全部开放式链接与最佳开放式链接示意图;
19.图5为开放式链接中点连接以及maklink示意图。
具体实施方式
20.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
21.场景建模是寻径问题的重要工作,选择对应的场景建模方法能有效提高寻径算法的准确性和效率,对于a*算法来说场景建模是必要的步骤。选择的场景建模方法为mk.habib和h.asama提出的wsp模拟方法,该方法对于寻径场景做出了以下设定:
22.(1)寻径场景使用左手三维坐标系,高度方向设置为z轴方向,寻径平面设置为xy平面。且场景中的障碍物都是正交棱柱体。
23.(2)为了确保行人智能体在最终得到的最优路径中行走时不会与任何障碍物发生碰撞,在设定行人智能体为一点时,将所有障碍物的边界扩张,扩张的程度与行人智能体的实际半径相适应。
24.使用wsp模拟方法进行场景建模如图1所示。在后面的算法实现部分会使用常规网格来完成wsp模拟方法的场景建模工作。
25.开放式链接是构建maklink图的基础,在由wsp模拟方法得到的场景建模基础上构建出寻径平面的开放式链接,接着按照开放式链接来构建maklink图。
26.开放式链接定义如下:
27.(1)线段两个端点为两个障碍物的顶点,或线段一端为障碍物顶点而另一端为寻径场景边界处的点;
28.(2)每条开放式链接都为两个开放式多边区域的边;
29.(3)开放式链接不能和任何障碍物的边交叉,也不能横穿障碍物;
30.(4)每个开放式多边区域的边缘至少包含两条开放式链接,由障碍物的边界组成其余部分。行人智能体在此区域内运动时可以避免与障碍物发生碰撞。开放式多边区域如图2中虚线围成的部分多边区域所示。
31.依据上文中对于开放式链接的定义,开放式链接的绘制方法如下:
32.(1)连接各个多边形障碍物的所有顶点与其余所有多边形障碍物顶点,并连接每个障碍物顶点与寻径场景边缘的垂直投影点,将所有连线线段置入线段集合l。
33.(2)将集合l中所有线段以线段长度升序排序。
34.(3)在集合l中取第一条线段。
35.(4)判断在第三步中所取线段与任意障碍物的边是否相交,若相交则将该线段从建模场景与线段集合中删除,并重复执行第三步;若不相交则进行下一步。
36.(5)判断当前线段与障碍物的凸出角所形成的两个角。
37.如果当前凸角没有最优开放式链接或当前线段与凸角所形成的两个角之一的角度不小于180度,则添加该线段到这个凸角的开放式链接队列中。
38.如果当前线段与凸出角所形成的两个角角度都不大于180度,则该线段即为最佳开放式链接,并且删除该凸出角的开放式链接队列中的其他线段。
39.(6)判断上一步中所形成的开放式链接与障碍物所形成的角是否大于180度。若存在则选择步骤2中线段集合l内的下一条线段再进行第4步,否则进行下一步。
40.(7)判断能否删除当前凸出角所冗余的开放式链接。
41.(8)重复上述步骤3至步骤7,直到遍历完线段集合l中的所有线段。
42.以上步骤全部完成后可得到当前寻径场景中的全部开放式链接。开放式链接示意图如图3中左图所示,图中三角形的凸出角与其三条开放式链接的夹角中都存在大于180度的夹角1、2、3,故形成三角形凸出角的开放式链接队列。最佳开放式链接示意图如图3中右图所示,图中左下方四边形的凸出角与红色虚线形成的两个夹角都小于180度,故该红色虚线为该凸出角的最佳开放式链接。
43.绘制该寻径场景开放式链接的示意图如图4中左图所示,该寻径场景的最佳开放式链接示意图如图4中右图所示,其中红色虚线代表障碍物顶点的最佳开放式链接,黑色虚线代表障碍物的开放式链接队列。
44.在完成寻径场景二维平面的开放式链接的绘制后,现在开始绘制寻径场景的maklink图。maklink图的绘制步骤如下:
45.(1)对于在寻径场景中所绘制的所有开放式链接,对每条线段的中间点进行标记,与寻径起点s和终点t合并为点集p。
46.(2)判断对于每个开放式区域内部或边缘是否覆盖点s和点t。若覆盖,则将每条开放式链接的中点、点s和点t进行连接,所形成的所有线段组成一个线段集合e1。
47.(3)连接每一个开放式区域内的每条开放式链接线段的中点,所形成的所有线段组成线段集合e2。
48.(4)删除所有开放式链接,即得到该寻径场景的maklink图g:g=(p,e),其中e=e1 e2。
49.图5中左图为在图4中右图的基础上标记并连接每条开放式链接的中点,并在特定区域内将开放式链接的中点与寻径起点或中点相连。绘制该寻径场景的maklink示意图如图5中右图所示。
50.在maklink图上能够更为准确地实现寻径算法。因为maklink图中包括点s和点t的所有定点在静态环境下都与障碍物保持间距,行人智能体直线运动在各个定点之间时可避免与障碍物发生碰撞。
51.虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。