1.本发明涉及激光器技术领域,具体涉及一种提高多通激光放大器稳定性的指向性监测系统及其指向性校正方法。
背景技术:
2.自啁啾激光脉冲放大(cpa)提出后,激光器的峰值功率飞跃发展,激光脉冲峰值功率可达数pw(10
15
w),激光光强可达10
22
w/cm2。
3.啁啾脉冲放大激光器如图1所示,由振荡器提供短脉冲源作为种子源,通常短脉冲源的脉冲能量在nj,经过展宽器将短脉冲源展宽后进入放大器组进行放大,可获得mj到百j量级能量激光,最后经过压缩器后将激光脉宽压缩到种子源的脉冲量级,从而获得高峰值功率激光脉冲。
4.在进行能量放大中,为了获得高能量脉冲输出,需要多个放大器逐渐将激光脉冲放大。第一步首先将种子源的nj激光脉冲放大到mj量级,mj量级激光脉冲进一步放大到j量级,j量级进一步放大到数十j量级这样的一个逐渐放大过程。在第一步将种子源的nj激光脉冲放大到mj量级,通常有2种放大器,再生放大和多通放大。再生放大稳定,光斑好被广泛使用,但是对比度差,因此在很多应用中首先。从nj到mj放大的多通激光放大器需要将种子和泵浦聚焦在几百微米,对空间重叠要求高,对激光指向性要求高,因此长久来并未得到很好推广,但是由于其具有高对比度,目前也在很多应用中逐渐替代再生。但是其稳定性目前主要靠机械稳定性的提高来提升。
5.图2是一个典型的多通激光放大器,种子源经第一反射镜101反射进入五通激光放大器,种子源进入五通激光放大器之后经第二反射镜102第一次经过增益介质112,称为第一通放大光路,经过第三反射镜103和第四反射镜104反射后第二次经过增益介质112,称为第二通放大光路,经过第五和第六反射镜105和106反射后第三次经过增益介质112,称为第三通放大光路,经过第七和第八反射镜107和108反射后第四次经过增益介质112,称为第四通放大光路,经过第九和第十反射镜109和110反射后第五次经过增益介质112,称为第五通放大光路。经过五通放大后的第五通放大光路经过第十一反射镜111传输出五通激光放大器。种子源五次经过增益介质112时在中心处重叠。增益介质112通过第一和第二泵浦源150和153从增益介质112两端双面泵浦,其中第一泵浦源150经过第一透镜151聚焦后经过第十二反射镜152反射进入增益介质112;第二泵浦源153经过第二透镜154聚焦后经过第十三反射镜155反射进入增益介质112。第一和第二泵浦源150和153在增益介质112中心处重叠。第一和第二泵浦源150和153在增益介质112上的光斑直径小于5mm,种子源在增益介质112上的光斑直径是第一和第二泵浦源在增益介质112上光斑直径的0.9倍。种子源在增益介质112中心处与泵浦源在增益介质112中心处重叠。
6.日常运行中,由于温度的变化,机械件的稳定性问题,总会使种子源和泵浦源在增益介质的中心处重叠不完美,导致多通激光放大器不可靠。目前此类将nj种子源放大到mj量级的多通激光放大器稳定性主要靠机械稳定性的提高来提升。
技术实现要素:
7.针对以上现有技术中存在的问题,本发明提出了一种提高多通激光放大器稳定性的指向性监测系统及其监测方法。
8.本发明的一个目的在于提出一种提高多通激光放大器稳定性的指向性监测系统。
9.本发明的提高多通激光放大器稳定性的指向性监测系统包括:楔形镜、凸透镜、前表面相机和后表面相机;其中,楔形镜的前表面与上下底面垂直,后表面与前表面的夹角为β;楔形镜的前表面镀高反射膜,使得到达前表面的大部分光反射,楔形镜的后表面不镀膜;入射光在大气中入射至楔形镜的前表面,前表面的第一次入射角为a,大部分光在楔形镜的前表面镜面反射形成前表面的反射光,前表面的反射角为a1,a=a1;小部分光经过楔形镜的前表面透射后进入楔形镜发生折射,形成前表面的第一次透射光,大气折射率为n1,楔形镜的折射率为n2,n1≠n2,第一次折射角为a;前表面的第一次透射光传输到楔形镜的后表面将发生镜面反射和透射,分别形成后表面的反射光和后表面的透射光,后表面的透射光经楔形镜的后表面透射出至大气,其中,后表面的反射角为b;后表面的反射光传输到楔形镜的前表面,发生镜面反射和透射,其中透射光线为前表面的第二次透射光,前表面的第二次透射光经楔形镜的前表面透射出至大气,后表面的反射光在楔形镜的前表面的第二次入射角为c,第二次折射角为a2;前表面的反射光与经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的前表面的第二次透射光在空间上分开;前表面的反射光作为多通放大主光路,为前表面的反射的大部分光经过增益介质;前表面的第二次透射光作为多通放大指向性诊断光路,前表面的第二次透射光利用前表面相机接收,测量激光指向性;经楔形镜的后表面透射出至大气的后表面的透射光经过凸透镜后入射至后表面相机中,楔形镜的前表面通过凸透镜成像,像面由后表面相机接收;
10.利用指向性监测系统监测多通激光放大器的光路指向性:种子源经第一反射镜反射后进入至多通激光放大器,经过楔形镜被分束为两束,其中在楔形镜的前表面,大部分光被反射,小部分光进入楔形镜,并通过楔形镜的后表面反射后再经过楔形镜的前表面透射出至大气,前表面反射的大部分光与经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为多通放大主光路,经过增益介质;经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的光作为多通放大指向性诊断光路,利用前表面相机接收,测量多通激光放大器的激光指向性;由于楔形镜是进入增益介质之前的最后一个光学元件,而楔形镜的前后表面的反射光的传输指向特性是相同的,因此,楔形镜的前表面的第二次透射光在前表面相机中记录的位置变化代表楔形镜的前表面的反射光在增益介质中的位置变化;由于多通放大指向性诊断光路没有其他元件的传输,因此更能准确诊断多通放大主光路在增益介质中的位置变化情况;经楔形镜的后表面透射出至大气的后表面的透射光经过凸透镜后入射至后表面相机中,楔形镜的前表面通过凸透镜成像,像面由后表面相机接收。
11.由于增益介质距离两侧镜片距离通常在0.5m左右;此时,1.5
°
<β<5
°
,β角度过大,后表面反射光无法从前表面透射,且楔形镜制造成本过高;β角度过小,前表面的反射光与经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的前表面的第二次透射光空间分开位置太小,不利于探测。例如,考虑到增益介质距离楔形镜距离为0.5m的情况下,楔形镜短边厚度为5mm时,β角度小于1.5
°
时,前表面的反射光与经楔形镜的后表面反射再经
楔形镜的前表面透射出至大气的前表面的第二次透射光空间分开距离为53mm,此为放置相机的极限空间,小于此空间不利于相机的放入。
12.根据光学原理,可知:
13.n1sin(a)=n2sin(a)
[0014][0015]
b=a β
[0016]
c=b β=a 2β
[0017]
n1sin(a2)=n2sin(c)
[0018][0019][0020]
可见,a=a1≠a2,楔形镜前表面的反射光与经过楔形镜后表面反射后再经前表面透射至大气的前表面的第二次透射光不共轴、不平行且空间上分开。
[0021]
进一步,在五通激光放大器中的每一通放大光路前加入一套指向性监测系统,共五套指向性监测系统,并且,第一至第五套指向性监测系统的第一至第五楔形镜分别代替五通激光放大器中的第二、第四、第六、第八和第十反射镜;
[0022]
在第一反射镜之后且在第一次经过增益介质之前加入第一套指向性监测系统,第一套指向性监测系统包括第一楔形镜、第一凸透镜、第一前表面相机和第一后表面相机;种子源经第一反射镜反射后进入至五通激光放大器,经过第一楔形镜被分束为两束,其中在第一楔形镜的前表面的大部分光被反射,小部分光进入第一楔形镜,并通过第一楔形镜的后表面反射后再经过第一楔形镜的前表面透射出至大气,前表面反射的大部分光与经第一楔形镜的后表面反射再经第一楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为种子源主光路,经过增益介质;经第一楔形镜的后表面反射再经第一楔形镜的前表面透射出至大气的光作为种子源指向性诊断光路,利用第一前表面相机接收,测量五通激光放大器的种子源指向性;由于第一楔形镜是种子源进入增益介质之前的最后一个光学元件,而第一楔形镜的前后表面的反射光的传输指向特性是相同的,因此,第一楔形镜的后表面的反射光在第一前表面相机中记录的位置变化代表第一楔形镜的前表面的反射光在增益介质中的位置变化;经第一楔形镜的后表面透射出至大气的后表面的透射光经过第一凸透镜后入射至第一后表面相机中,第一楔形镜的前表面通过第一凸透镜成像,像面由第一后表面相机接收,记录的是种子源在第一楔形镜上的位置;种子源主光路经过增益介质后形成第一通放大光路;
[0023]
在第三反射镜之后且在第二次经过增益介质之前加入第二套指向性监测系统,第二套指向性监测系统包括第二楔形镜、第二凸透镜、第二前表面相机和第二后表面相机;第一通放大光路经第二反射镜和第二楔形镜反射后进入增益介质,经过第二楔形镜被分束为两束,其中在第二楔形镜的前表面的大部分光被反射,小部分光进入第二楔形镜,并通过第
二楔形镜的后表面反射后再经过第二楔形镜的前表面透射出至大气,前表面反射的大部分光与经第二楔形镜的后表面反射再经第二楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第一通放大主光路,经过增益介质;经第二楔形镜的后表面反射再经第二楔形镜的前表面透射出至大气的光作为第一通放大指向性诊断光路,利用第二前表面相机接收,测量五通激光放大器的第一通放大光路指向性;由于第二楔形镜是第一通放大进入增益介质之前的最后一个光学元件,而第二楔形镜的前后表面的反射光的传输指向特性是相同的,因此,第二楔形镜的后表面的反射光在第二前表面相机中记录的位置变化代表第二楔形镜的前表面的反射光在增益介质中的位置变化;经第二楔形镜的后表面透射出至大气的后表面的透射光经过第二凸透镜后入射至第二后表面相机中,第二楔形镜的前表面通过第二凸透镜成像,像面由第二后表面相机接收,记录的是第一通放大光路在第二楔形镜上的位置;第一通放大主光路经过增益介质后形成第二通放大光路;
[0024]
在第五反射镜之后且在第三次经过增益介质之前加入第三套指向性监测系统,第三套指向性监测系统包括第三楔形镜、第三凸透镜、第三前表面相机和第三后表面相机;第二通放大光路经第三反射镜和第三楔形镜反射后进入增益介质,经过第三楔形镜被分束为两束,其中在第三楔形镜的前表面的大部分光被反射,小部分光进入第三楔形镜,并通过第三楔形镜的后表面反射后再经过第三楔形镜的前表面透射出至大气,前表面反射的大部分光与经第三楔形镜的后表面反射再经第三楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第二通放大主光路,经过增益介质;经第三楔形镜的后表面反射再经第三楔形镜的前表面透射出至大气的光作为第二通放大指向性诊断光路,利用第三前表面相机接收,测量五通激光放大器的第二通放大光路指向性;由于第三楔形镜是第二通放大进入增益介质之前的最后一个光学元件,而第三楔形镜的前后表面的反射光的传输指向特性是相同的,因此,第三楔形镜的后表面的反射光在第三前表面相机中记录的位置变化代表第三楔形镜的前表面的反射光在增益介质中的位置变化;经第三楔形镜的后表面透射出至大气的后表面的透射光经过第三凸透镜后入射至第三后表面相机中,第三楔形镜的前表面通过第三凸透镜成像,像面由第三后表面相机接收,记录的是第二通放大光路在第三楔形镜上的位置;第二通放大主光路经过增益介质后形成第三通放大光路;
[0025]
在第七反射镜之后且在第四次经过增益介质之前加入第四套指向性监测系统,第四套指向性监测系统包括第四楔形镜、第四凸透镜、第四前表面相机和第四后表面相机;第三通放大光路经第四反射镜和第四楔形镜反射后进入增益介质,经过第四楔形镜被分束为两束,其中在第四楔形镜的前表面的大部分光被反射,小部分光进入第四楔形镜,并通过第四楔形镜的后表面反射后再经过第四楔形镜的前表面透射出至大气,前表面反射的大部分光与经第四楔形镜的后表面反射再经第四楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第三通放大主光路,经过增益介质;经第四楔形镜的后表面反射再经第四楔形镜的前表面透射出至大气的光作为第三通放大指向性诊断光路,利用第四前表面相机接收,测量五通激光放大器的第三通放大光路指向性;由于第四楔形镜是第三通放大进入增益介质之前的最后一个光学元件,而第四楔形镜的前后表面的反射光的传输指向特性是相同的,因此,第四楔形镜的后表面的反射光在第四前表面相机中记录的位置变化代表第四楔形镜的前表面的反射光在增益介质中的位置变化;经第四楔形镜的后表面透射出至大气的后表面的透射光经过第四凸透镜后入射至第四后表面相机中,第四楔形
镜的前表面通过第四凸透镜成像,像面由第四后表面相机接收,记录的是第三通放大光路在第四楔形镜上的位置;第三通放大主光路经过增益介质后形成第四通放大光路;
[0026]
在第九反射镜之后且在第五次经过增益介质之前加入第五套指向性监测系统,第五套指向性监测系统包括第五楔形镜、第五凸透镜、第五前表面相机和第五后表面相机;第四通放大光路经第五反射镜和第五楔形镜反射后进入增益介质,经过第五楔形镜被分束为两束,其中在第五楔形镜的前表面的大部分光被反射,小部分光进入第五楔形镜,并通过第五楔形镜的后表面反射后再经过第五楔形镜的前表面透射出至大气,前表面反射的大部分光与经第五楔形镜的后表面反射再经第五楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第四通放大主光路,经过增益介质;经第五楔形镜的后表面反射再经第五楔形镜的前表面透射出至大气的光作为第四通放大指向性诊断光路,利用第五前表面相机接收,测量五通激光放大器的第四通放大光路指向性;由于第五楔形镜是第四通放大进入增益介质之前的最后一个光学元件,而第五楔形镜的前后表面的反射光的传输指向特性是相同的,因此,第五楔形镜的后表面的反射光在第五前表面相机中记录的位置变化代表第五楔形镜的前表面的反射光在增益介质中的位置变化;经第五楔形镜的后表面透射出至大气的后表面的透射光经过第五凸透镜后入射至第五后表面相机中,第五楔形镜的前表面通过第五凸透镜成像,像面由第五后表面相机接收,记录的是第四通放大光路在第五楔形镜上的位置;第四通放大主光路经过第五楔形镜后形成第五通放大光路,经第十一反射镜反射后输出,由此完成五通激光放大器。
[0027]
激光五次通过增益介质时,在增益介质的中心重叠。
[0028]
楔形镜的前表面镀高反射膜使得前表面反射率大于99%,透射率小于1%。
[0029]
本发明的另一个目的在于提出一种提高多通激光放大器稳定性的指向性监测系统的指向性校正方法。
[0030]
在指向性监测系统对激光光路进行指向性校正之前,需要对光路进行初次调试,包括以下步骤:将小孔代替增益介质放置在增益介质处;第一泵浦源经过第一透镜聚焦后经过第十二反射镜反射进入小孔;第二泵浦源经过第二透镜聚焦后经过第十三反射镜反射进入小孔,从而第一和第二泵浦源在小孔的中心处重叠;种子源及第一通到第四通光路也进入小孔;将增益介质替换小孔,增益介质的中心位于小孔的中心,从而激光光路与第一和第二泵浦源在增益介质的中心处重叠;第一和第二泵浦源在增益介质上的光斑直径小于5mm,种子源在增益介质上的光斑直径是第一和第二泵浦源在增益介质上光斑直径的0.9倍。
[0031]
本发明的提高多通激光放大器稳定性的指向性监测系统的监测多通激光放大器的指向性校正方法,包括以下步骤:
[0032]
(1)在初次调试光路完成后,记录种子源在后表面相机的位置,记为后表面位置,记录种子源在前表面相机上的位置,记为前表面位置;
[0033]
(2)再次运行光路时,由于经过放置,光路会有偏移,观察后表面相机中光斑位置,调节第一反射镜使后表面相机上的光斑位置调到后表面位置,此时保证入射到楔形镜上的光斑位置回到初次调试光路的位置;
[0034]
(3)观察前表面相机中光斑位置,调节楔形镜使后表面相机上记录光斑位置调到前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于楔形镜
反射的多通放大主光路,其反射起点即楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路位置,此时楔形镜的反射光路回到初次调试状态。
[0035]
进一步,本发明的提高多通激光放大器稳定性的指向性监测系统对五通激光放大器中的每一通放大光路的指向性校正方法,包括以下步骤:
[0036]
一.记录光斑位置
[0037]
1)在初次调试光路完成后,记录种子源在第一后表面相机的位置,记为第一后表面位置,第一后表面位置为种子源进入增益介质前最后一块光学元件第一即楔形镜上种子源的位置;记录种子源在第一前表面相机上的位置,记为第一前表面位置,第一前表面位置等效于种子源经过增益介质时增益介质上种子源的位置;
[0038]
2)记录第一通放大光路通过增益介质后在第二后表面相机的位置,记为第二后表面位置,第二后表面位置为第一通放大光路进入增益介质前最后一块光学元件即第二楔形镜上第一通放大光路的位置;记录第一通放大光路在第二前表面相机上的位置,记为第二前表面位置,第二前表面位置等效于第一通放大光路经过增益介质时增益介质上第一通放大光路的位置;
[0039]
3)记录激第二通放大光路通过增益介质后在第三后表面相机的位置,记为第三后表面位置,第三后表面位置为第二通放大光路进入增益介质前最后一块光学元件即第三楔形镜上第二通放大光路的位置;记录第二通放大光路在第三前表面相机上的位置,记为第三前表面位置,第三前表面位置等效于第二通放大光路经过增益介质时增益介质上第二通放大光路的位置;
[0040]
4)记录第三通放大光路通过增益介质后在第四后表面相机的位置,记为第四后表面位置,第四后表面位置为第三通放大光路进入增益介质前最后一块光学元件即第四楔形镜上第三通放大光路的位置;记录第三通放大光路在第四前表面相机上的位置,记为第四前表面位置,第四前表面位置等效于第三通放大光路经过增益介质时增益介质上第三通放大光路的位置;
[0041]
5)记录第四通放大光路通过增益介质后在第五后表面相机的位置,记为第五后表面位置,第五后表面位置为第四通放大光路进入增益介质前最后一块光学元件即第五楔形镜上第四通放大光路的位置;记录第四通放大光路在第五前表面相机上的位置,记为第五前表面位置,第五前表面位置等效于第四通放大光路经过增益介质时增益介质上第四通放大光路的位置;
[0042]
二.调整到楔形镜上的光斑位置
[0043]
1)种子源光路调整
[0044]
再次运行光路时,观察第一后表面相机中光斑位置,调节第一反射镜使第一后表面相机上的光斑位置调到第一后表面位置,此时保证入射到第一楔形镜上的光斑位置回到初次调试光路的位置;
[0045]
观察第一前表面相机中光斑位置,调节第一楔形镜使第一后表面相机上记录光斑位置调到第一前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第一楔形镜反射的种子源主光路,其反射起点即第一楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第一楔形镜的反射光路回到初次调试状态即种子源到初次调试状态;
[0046]
2)第一通放大光路调整
[0047]
种子源到初次调试状态后,观察第二后表面相机中光斑位置,调节第二反射镜使第二后表面相机上的光斑位置调到第二后表面位置,此时保证入射到第二楔形镜上的光斑位置回到初次调试光路的位置;
[0048]
观察第二前表面相机中光斑位置,调节第二楔形镜使第二后表面相机上记录光斑位置调到第二前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第二楔形镜反射的第一通放大主光路,其反射起点即第二楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第二楔形镜的反射光路回到初次调试状态即第一通放大光路回到初次调试状态;
[0049]
3)第二通放大光路调整
[0050]
第一通放大光路回到初次调试状态后,观察第三后表面相机中光斑位置,调节第三反射镜使第三后表面相机上的光斑位置调到第三后表面位置,此时保证入射到第三楔形镜上的光斑位置回到初次调试光路的位置;
[0051]
观察第三前表面相机中光斑位置,调节第三楔形镜使第三后表面相机上记录光斑位置调到第三前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第三楔形镜反射的第二通放大主光路,其反射起点即第三楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第三楔形镜的反射光路回到初次调试状态即第二通放大光路回到初次调试状态;
[0052]
4)第三通放大光路调整
[0053]
第二通放大光路回到初次调试状态后,观察第四后表面相机中光斑位置,调节第四反射镜使第四后表面相机上的光斑位置调到第四后表面位置,此时保证入射到第四楔形镜上的光斑位置回到初次调试光路的位置;
[0054]
观察第四前表面相机中光斑位置,调节第四楔形镜使第四后表面相机上记录光斑位置调到第四前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第四楔形镜反射的第三通放大主光路,其反射起点即第四楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第四楔形镜的反射光路回到初次调试状态即第三通放大光路回到初次调试状态;
[0055]
5)第四通放大光路调整
[0056]
第三通放大光路回到初次调试状态后,观察第五后表面相机中光斑位置,调节第五反射镜使第五后表面相机上的光斑位置调到第五后表面位置,此时保证入射到第五楔形镜上的光斑位置回到初次调试光路的位置;
[0057]
观察第五前表面相机中光斑位置,调节第五楔形镜使第五后表面相机上记录光斑位置调到第五前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第五楔形镜反射的第四通放大主光路,其反射起点即第五楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第五楔形镜的反射光路回到初次调试状态即第四通放大光路回到初次调试状态。
[0058]
本发明的优点:
[0059]
本发明的增益介质中光束位置的监测光路没有经过其他元件,极大降低辅助元件引入光路指向性监测的误差;尤其是反射光学元件使用的避免,将更真实地反应在增益介
质中激光光束的指向性;虽然在楔形镜前表面反射处入射点的诊断中使用了透射元件,但是透射元件对激光的指向性影响较低,因此对整体的诊断影响不大。
附图说明
[0060]
图1为现有技术中啁啾脉冲放大激光器的示意图;
[0061]
图2为现有技术中五通激光放大器的示意图;
[0062]
图3为本发明的提高多通激光放大器稳定性的指向性监测系统的楔形镜的前后表面的反射光路的示意图;
[0063]
图4为利用本发明的提高多通激光放大器稳定性的指向性监测系统监测多通激光放大器的光路指向性的示意图;
[0064]
图5为利用本发明的提高多通激光放大器稳定性的指向性监测系统监测五通激光放大器中每一通放大光路指向性的示意图。
具体实施方式
[0065]
下面结合附图,通过具体实施例,进一步阐述本发明。
[0066]
本实施例的提高多通激光放大器稳定性的指向性监测系统包括:楔形镜01、凸透镜02、前表面相机03和后表面相机04;其中,如图3所示,楔形镜01的前表面与上下底面垂直,后表面与前表面的夹角为β;楔形镜01的前表面镀高反射膜,使得到达前表面的大部分光反射,楔形镜01的后表面不镀膜;入射光1在大气中入射至楔形镜01的前表面,前表面的第一次入射角为a,大部分光在楔形镜01的前表面镜面反射形成前表面的反射光2,前表面的反射角为a1,a=a1;小部分光经过楔形镜01的前表面透射后进入楔形镜01,大气折射率为n1,楔形镜01的折射率为n2,n1≠n2,透射光发生折射形成前表面的第一次透射光3,第一次折射角为a;前表面的第一次透射光3传输到楔形镜01的后表面将发生镜面反射和透射,分别形成后表面的反射光4和后表面的透射光,后表面的透射光经楔形镜01的后表面透射出至大气,其中,后表面的反射角为b;后表面的反射光4传输到楔形镜01的前表面,发生镜面反射和透射,其中透射光线为前表面的第二次透射光5,前表面的第二次透射光5经楔形镜01的前表面透射出至大气,后表面的反射光在楔形镜01的前表面的第二次入射角为c,第二次折射角为a2;前表面的反射光2与经楔形镜01的后表面反射再经楔形镜01的前表面透射出至大气的前表面的第二次透射光5在空间上分开;前表面的反射光2作为多通放大主光路,前表面反射的大部分光经过增益介质;前表面的第二次透射光5作为多通放大指向性诊断光路,前表面的第二次透射光5利用前表面相机03接收,测量激光指向性;经楔形镜01的后表面透射出至大气的后表面的透射光经过凸透镜02后入射至后表面相机04中,楔形镜01的前表面通过凸透镜02成像,像面由后表面相机04接收;
[0067]
根据光学原理,可知:
[0068]
n1sin(a)=n2sin(a)
[0069][0070]
b=a β
[0071]
c=b β=a 2β
[0072]
n1sin(a2)=n2sin(c)
[0073][0074]
可见,a=a1≠a2,楔形镜前表面的反射光2与经过楔形镜后表面反射后再经前表面透射至大气的前表面的第二次透射光5不共轴、不平行且空间上分开。
[0075]
实施例一
[0076]
在本实施例中,利用指向性监测系统监测多通放大器的光路指向性,如图4所示:楔形镜的前表面镀高反射膜使得前表面反射率大于99%,透射率小于1%;种子源经第一反射镜反射后进入至多通激光放大器,经过楔形镜被分束为两束,其中在楔形镜的前表面的大于99%的光被反射,小于1%的光进入楔形镜,并通过楔形镜的后表面反射后再经过楔形镜的前表面透射出至大气,前表面反射的大部分光与经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为多通放大主光路,经过增益介质;经楔形镜的后表面反射再经楔形镜的前表面透射出至大气的光作为多通放大指向性诊断光路,利用前表面相机接收,测量多通激光放大器的激光指向性;由于楔形镜是进入增益介质之前的最后一个光学元件,而楔形镜的前后表面的反射光的传输指向特性是相同的,因此,楔形镜的第二次透射光在前表面相机中记录的位置变化代表楔形镜的前表面的反射光在增益介质中的位置变化;由于诊断光没有其他元件的传输,因此更能准确诊断多通放大主光路在增益介质中的位置变化情况;经楔形镜的后表面透射出至大气的后表面的透射光经过凸透镜后入射至后表面相机中,楔形镜的前表面通过凸透镜成像,像面由后表面相机接收。
[0077]
将指向性监测系统放置在多通激光放大器中,楔形镜代替第二反射镜在指向性监测系统对激光光路进行指向性校正之前,先对光路进行初次调试,包括以下步骤:将小孔代替增益介质放置在增益介质处;第一泵浦源150经过第一透镜151聚焦后经过第十二反射镜152反射进入小孔;第二泵浦源153经过第二透镜154聚焦后经过第十三反射镜155反射进入小孔,从而第一和第二泵浦源150和153在增益介质112的中心处重叠;种子源及第一通到第四通光路也进入小孔,从而激光光路在增益介质112中心处与第一和第二泵浦源在增益介质112中心处重叠;将增益介质替换小孔,增益介质的中心位于小孔的中心;第一和第二泵浦源150和153在增益介质112上的光斑直径小于5mm,种子源在增益介质112上的光斑直径是第一和第二泵浦源在增益介质112上光斑直径的0.9倍。
[0078]
在指向性监测系统对种子源光路进行指向性校正之前,需要对光路进行初次调试:将小孔代替增益介质放置在增益介质处;第一泵浦源150经过第一透镜151聚焦后经过第十二反射镜152反射进入小孔;第二泵浦源153经过第二透镜154聚焦后经过第十三反射镜155反射进入小孔,从而第一和第二泵浦源150和153在小孔的中心处重叠;种子源及第一通到第四通光路也进入小孔;将增益介质替换小孔,增益介质的中心位于小孔的中心,从而激光光路与第一和第二泵浦源在增益介质112的中心处重叠;第一和第二泵浦源150和153
在增益介质112上的光斑直径小于5mm,种子源在增益介质112上的光斑直径是第一和第二泵浦源在增益介质112上光斑直径的0.9倍。
[0079]
本实施例的提高多通激光放大器稳定性的指向性监测系统的监测多通激光放大器的指向性校正方法,包括以下步骤:
[0080]
一.在初次调试光路完成后,记录种子源在后表面相机的位置,记为后表面位置,记录种子源在前表面相机上的位置,记为前表面位置;
[0081]
二.再次运行光路时,由于经过放置,镜架的变形等会让光路不再沿着初次调试的方向,会有偏移,观察后表面相机中光斑位置,调节第一反射镜使后表面相机上的光斑位置调到后表面位置,此时保证入射到楔形镜上的光斑位置回到初次调试光路的位置;
[0082]
三.观察前表面相机中光斑位置,调节楔形镜使后表面相机上记录光斑位置调到前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于楔形镜反射的多通放大主光路,其反射起点即楔形镜上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路位置,此时楔形镜的反射光路回到初次调试状态。
[0083]
实施例二
[0084]
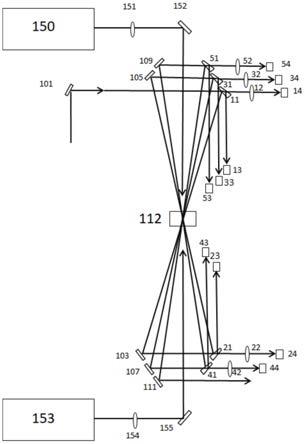
在本实施例中,在五通激光放大器中的每一通放大光路前加入一套指向性监测系统,共五套指向性监测系统,并且,第一至第五套指向性监测系统的第一至第五楔形镜分别代替五通激光放大器中的第二、第四、第六、第八和第十反射镜,如图5所示;
[0085]
在第一反射镜之后且在第一次经过增益介质之前加入第一套指向性监测系统,第一套指向性监测系统包括第一楔形镜11、第一凸透镜12、第一前表面相机13和第一后表面相机14;种子源经第一反射镜反射后进入至五通激光放大器,经过第一楔形镜11被分束为两束,其中在第一楔形镜11的前表面的大部分光被反射,小部分光进入第一楔形镜11,并通过第一楔形镜11的后表面反射后再经过第一楔形镜11的前表面透射出至大气,前表面反射的大部分光与经第一楔形镜11的后表面反射再经第一楔形镜11的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为种子源主光路,经过增益介质;经第一楔形镜11的后表面反射再经第一楔形镜11的前表面透射出至大气的光作为种子源指向性诊断光路,利用前表面相机接收,测量五通激光放大器的种子源指向性;由于第一楔形镜11是种子源进入增益介质之前的最后一个光学元件,而第一楔形镜11的前后表面的反射光的传输指向特性是相同的,因此,第一楔形镜11的后表面的反射光在第一前表面相机13中记录的位置变化代表第一楔形镜11的前表面的反射光在增益介质中的位置变化;经第一楔形镜11的后表面透射出至大气的后表面的透射光经过第一凸透镜12后入射至第一后表面相机14中,第一楔形镜11的前表面通过第一凸透镜12成像,像面由第一后表面相机14接收,记录的是种子源在第一楔形镜11上的位置;种子源主光路经过增益介质后形成第一通放大光路;
[0086]
在第三反射镜之后且在第二次经过增益介质之前加入第二套指向性监测系统,第二套指向性监测系统包括第二楔形镜21、第二凸透镜22、第二前表面相机23和第二后表面相机24;第一通放大光路经第二反射镜和第二楔形镜21反射后进入至增益介质,经过第二楔形镜21被分束为两束,其中在第二楔形镜21的前表面的大部分光被反射,小部分光进入第二楔形镜21,并通过第二楔形镜21的后表面反射后再经过第二楔形镜21的前表面透射出至大气,前表面反射的大部分光与经第二楔形镜21的后表面反射再经第二楔形镜21的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第一通放大主光路,经过
增益介质;经第二楔形镜21的后表面反射再经第二楔形镜21的前表面透射出至大气的光作为第一通放大指向性诊断光路,利用前表面相机接收,测量五通激光放大器的第一通放大光路指向性;由于第二楔形镜21是第一通放大进入增益介质之前的最后一个光学元件,而第二楔形镜21的前后表面的反射光的传输指向特性是相同的,因此,第二楔形镜21的后表面的反射光在第二前表面相机23中记录的位置变化代表第二楔形镜21的前表面的反射光在增益介质中的位置变化;经第二楔形镜21的后表面透射出至大气的后表面的透射光经过第二凸透镜22后入射至第二后表面相机24中,第二楔形镜21的前表面通过第二凸透镜22成像,像面由第二后表面相机24接收,记录的是第一通放大光路在第二楔形镜21上的位置;第一通放大主光路经过增益介质后形成第二通放大光路;
[0087]
在第五反射镜之后且在第三次经过增益介质之前加入第三套指向性监测系统,第三套指向性监测系统包括第三楔形镜31、第三凸透镜32、第三前表面相机33和第三后表面相机34;第二通放大光路经第三反射镜和第三楔形镜31反射后进入至增益介质,经过第三楔形镜31被分束为两束,其中在第三楔形镜31的前表面的大部分光被反射,小部分光进入第三楔形镜31,并通过第三楔形镜31的后表面反射后再经过第三楔形镜31的前表面透射出至大气,前表面反射的大部分光与经第三楔形镜31的后表面反射再经第三楔形镜31的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第二通放大主光路,经过增益介质;经第三楔形镜31的后表面反射再经第三楔形镜31的前表面透射出至大气的光作为第二通放大指向性诊断光路,利用前表面相机接收,测量五通激光放大器的第二通放大光路指向性;由于第三楔形镜31是第二通放大进入增益介质之前的最后一个光学元件,而第三楔形镜31的前后表面的反射光的传输指向特性是相同的,因此,第三楔形镜31的后表面的反射光在第三前表面相机33中记录的位置变化代表第三楔形镜31的前表面的反射光在增益介质中的位置变化;经第三楔形镜31的后表面透射出至大气的后表面的透射光经过第三凸透镜32后入射至第三后表面相机34中,第三楔形镜31的前表面通过第三凸透镜32成像,像面由第三后表面相机34接收,记录的是第二通放大光路在第三楔形镜31上的位置;第二通放大主光路经过增益介质后形成第三通放大光路;
[0088]
在第七反射镜之后且在第四次经过增益介质之前加入第四套指向性监测系统,第四套指向性监测系统包括第四楔形镜41、第四凸透镜42、第四前表面相机43和第四后表面相机44;第三通放大光路经第四反射镜和第四楔形镜41反射后进入至增益介质,经过第四楔形镜41被分束为两束,其中在第四楔形镜41的前表面的大部分光被反射,小部分光进入第四楔形镜41,并通过第四楔形镜41的后表面反射后再经过第四楔形镜41的前表面透射出至大气,前表面反射的大部分光与经第四楔形镜41的后表面反射再经第四楔形镜41的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第三通放大主光路,经过增益介质;经第四楔形镜41的后表面反射再经第四楔形镜41的前表面透射出至大气的光作为第三通放大指向性诊断光路,利用前表面相机接收,测量五通激光放大器的第三通放大光路指向性;由于第四楔形镜41是第三通放大进入增益介质之前的最后一个光学元件,而第四楔形镜41的前后表面的反射光的传输指向特性是相同的,因此,第四楔形镜41的后表面的反射光在第四前表面相机43中记录的位置变化代表第四楔形镜41的前表面的反射光在增益介质中的位置变化;经第四楔形镜41的后表面透射出至大气的后表面的透射光经过第四凸透镜42后入射至第四后表面相机44中,第四楔形镜41的前表面通过第四凸透镜42成
像,像面由第四后表面相机44接收,记录的是第三通放大光路在第四楔形镜41上的位置;第三通放大主光路经过增益介质后形成第四通放大光路;
[0089]
在第九反射镜之后且在第五次经过增益介质之前加入第五套指向性监测系统,第五套指向性监测系统包括第五楔形镜51、第五凸透镜52、第五前表面相机53和第五后表面相机54;第四通放大光路经第五反射镜和第五楔形镜51反射后进入至增益介质,经过第五楔形镜51被分束为两束,其中在第五楔形镜51的前表面的大部分光被反射,小部分光进入第五楔形镜51,并通过第五楔形镜51的后表面反射后再经过第五楔形镜51的前表面透射出至大气,前表面反射的大部分光与经第五楔形镜51的后表面反射再经第五楔形镜51的前表面透射出至大气的光在空间上分开;前表面反射的大部分光作为第四通放大主光路,经过增益介质;经第五楔形镜51的后表面反射再经第五楔形镜51的前表面透射出至大气的光作为第四通放大指向性诊断光路,利用前表面相机接收,测量五通激光放大器的第四通放大光路指向性;由于第五楔形镜51是第四通放大进入增益介质之前的最后一个光学元件,而第五楔形镜51的前后表面的反射光的传输指向特性是相同的,因此,第五楔形镜51的后表面的反射光在第五前表面相机53中记录的位置变化代表第五楔形镜51的前表面的反射光在增益介质中的位置变化;经第五楔形镜51的后表面透射出至大气的后表面的透射光经过第五凸透镜52后入射至第五后表面相机54中,第五楔形镜51的前表面通过第五凸透镜52成像,像面由第五后表面相机54接收,记录的是第四通放大光路在第五楔形镜51上的位置。第四通放大主光路经过第五楔形镜51后形成第五通放大光路,经第十一反射镜反射后输出,由此完成五通激光放大器。激光五次通过增益介质时,在增益介质的中心重叠。
[0090]
本实施例的提高多通激光放大器稳定性的指向性监测系统对五通激光放大器中的每一通放大光路的指向性校正方法,包括以下步骤:
[0091]
一.记录光斑位置
[0092]
1)在初次调试光路完成后,记录种子源在第一后表面相机14的位置,记为第一后表面位置,第一后表面位置为种子源进入增益介质前最后一块光学元件即第一楔形镜上种子源的位置;记录种子源在第一前表面相机13上的位置,记为第一前表面位置,第一前表面位置等效于种子源经过增益介质时增益介质上种子源的位置;
[0093]
2)记录第一通放大光路通过增益介质后在第二后表面相机24的位置,记为第二后表面位置,第二后表面位置为第一通放大光路进入增益介质前最后一块光学元件即第二楔形镜上第一通放大光路的位置;记录第一通放大光路在第二前表面相机23上的位置,记为第二前表面位置,第二前表面位置等效于第一通放大光路经过增益介质时增益介质上第一通放大光路的位置;
[0094]
3)记录激第二通放大光路通过增益介质后在第三后表面相机34的位置,记为第三后表面位置,第三后表面位置为第二通放大光路进入增益介质前最后一块光学元件即第三楔形镜上第二通放大光路的位置;记录第二通放大光路在第三前表面相机33上的位置,记为第三前表面位置,第三前表面位置等效于第二通放大光路经过增益介质时增益介质上第二通放大光路的位置;
[0095]
4)记录第三通放大光路通过增益介质后在第四后表面相机44的位置,记为第四后表面位置,第四后表面位置为第三通放大光路进入增益介质前最后一块光学元件即第四楔形镜上第三通放大光路的位置;记录第三通放大光路在第四前表面相机43上的位置,记为
第四前表面位置,第四前表面位置等效于第三通放大光路经过增益介质时增益介质上第三通放大光路的位置;
[0096]
5)记录第四通放大光路通过增益介质后在第五后表面相机54的位置,记为第五后表面位置,第五后表面位置为第四通放大光路进入增益介质前最后一块光学元件即第五楔形镜上第四通放大光路的位置;记录第四通放大光路在第五前表面相机53上的位置,记为第五前表面位置,第五前表面位置等效于第四通放大光路经过增益介质时增益介质上第四通放大光路的位置;
[0097]
二.调整到楔形镜上的光斑位置
[0098]
1)种子源光路调整
[0099]
再次运行光路时,观察第一后表面相机14中光斑位置,调节第一反射镜使第一后表面相机14上的光斑位置调到第一后表面位置,此时保证入射到第一楔形镜11上的光斑位置回到初次调试光路的位置;
[0100]
观察第一前表面相机13中光斑位置,调节第一楔形镜11使第一后表面相机14上记录光斑位置调到第一前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第一楔形镜11反射的种子源主光路,其反射起点即第一楔形镜11上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第一楔形镜11的反射光路回到初次调试状态即种子源到初次调试状态;
[0101]
2)第一通放大光路调整
[0102]
种子源到初次调试状态后,观察第二后表面相机24中光斑位置,调节第二反射镜使第二后表面相机24上的光斑位置调到第二后表面位置,此时保证入射到第二楔形镜21上的光斑位置回到初次调试光路的位置;
[0103]
观察第二前表面相机23中光斑位置,调节第二楔形镜21使第二后表面相机24上记录光斑位置调到第二前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第二楔形镜21反射的第一通放大主光路,其反射起点即第二楔形镜21上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第二楔形镜21的反射光路回到初次调试状态即第一通放大光路回到初次调试状态;
[0104]
3)第二通放大光路调整
[0105]
第一通放大光路回到初次调试状态后,观察第三后表面相机34中光斑位置,调节第三反射镜使第三后表面相机34上的光斑位置调到第三后表面位置,此时保证入射到第三楔形镜31上的光斑位置回到初次调试光路的位置;
[0106]
观察第三前表面相机33中光斑位置,调节第三楔形镜31使第三后表面相机34上记录光斑位置调到第三前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第三楔形镜31反射的第二通放大主光路,其反射起点即第三楔形镜31上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第三楔形镜31的反射光路回到初次调试状态即第二通放大光路回到初次调试状态;
[0107]
4)第三通放大光路调整
[0108]
第二通放大光路回到初次调试状态后,观察第四后表面相机44中光斑位置,调节第四反射镜使第四后表面相机44上的光斑位置调到第四后表面位置,此时保证入射到第四楔形镜41上的光斑位置回到初次调试光路的位置;
[0109]
观察第四前表面相机43中光斑位置,调节第四楔形镜41使第四后表面相机44上记录光斑位置调到第四前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第四楔形镜41反射的第三通放大主光路,其反射起点即第四楔形镜41上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第四楔形镜41的反射光路回到初次调试状态即第三通放大光路回到初次调试状态;
[0110]
5)第四通放大光路调整
[0111]
第三通放大光路回到初次调试状态后,观察第五后表面相机54中光斑位置,调节第五反射镜使第五后表面相机54上的光斑位置调到第五后表面位置,此时保证入射到第五楔形镜51上的光斑位置回到初次调试光路的位置;
[0112]
观察第五前表面相机53中光斑位置,调节第五楔形镜51使第五后表面相机54上记录光斑位置调到第五前表面位置,此时保证入射到增益介质上光斑位置回到初次调试光路的位置;由于第五楔形镜51反射的第四通放大主光路,其反射起点即第五楔形镜51上光斑位置和其目标点即增益介质上光斑位置均回到初次调试光路的位置,此时第五楔形镜51的反射光路回到初次调试状态即第四通放大光路回到初次调试状态。
[0113]
最后需要注意的是,公布实施例的目的在于帮助进一步理解本发明,但是本领域的技术人员可以理解:在不脱离本发明及所附的权利要求的精神和范围内,各种替换和修改都是可能的。因此,本发明不应局限于实施例所公开的内容,本发明要求保护的范围以权利要求书界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。