技术特征:
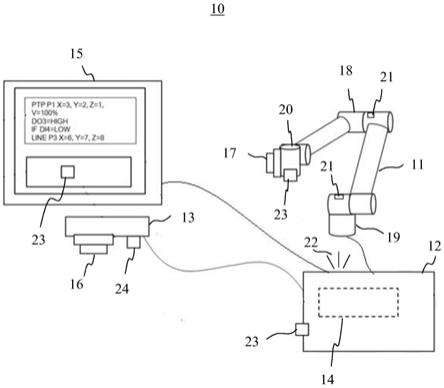
1.一种机器人的自动模式安全系统,包含:机器人,具有多肘节,一端为活动的末端,该各肘节中设置致动器及位置传感器;控制器,连接该机器人,控制该致动器及该位置传感器,移动该机器人的末端,且储存自动模式的静止状态程序;示教器,连接至控制器;人机界面,连接至控制器,显示编辑程序或作业程序或操控画面;手拉致能装置,具备致能与启动手拉的致能开关;安全模块,设于该控制器内,与该手拉致能装置及该位置传感器电性或通信相连,依据该手拉致能装置开关状态,发出电性或通信信号与安全模块最终相连;其中,该机器人于自动模式下,运行至该静止状态程序后,让该机器人进入静止状态,机器人进入安全状态,按压该手拉致能装置于开状态手拉牵引该机器人。2.如权利要求1所述的机器人的自动模式安全系统,其中该安全模块电性或通信连接该机器人各肘节的该位置传感器,接收该位置传感器的信号进行监控该机器人的活动状态。3.如权利要求1所述的机器人的自动模式安全系统,其中该静止状态程序由该人机界面进行编程或预先编程备用。4.如权利要求1所述的机器人的自动模式安全系统,其中该安全系统在静止状态进入等待启用状态,由用户指示启动该安全系统的启用机制,让该机器人进入安全状态。5.如权利要求4所述的机器人的自动模式安全系统,其中该启用机制设在该机器人的末端或该控制器或该示教器或该人机界面。6.如权利要求5所述的机器人的自动模式安全系统,其中该启用机制为io接口或通信的软硬件按钮或传感器感测用户身体部位动作获得指示信号。7.如权利要求1所述的机器人的自动模式安全系统,其中该静止状态利用提醒机制,提醒该机器人进入等待启用状态。8.如权利要求7所述的机器人的自动模式安全系统,其中该提醒机制由该控制器的灯号或响声,或该人机界面的显示,或该机器人反复展示特定动作示意,或由io通知,或由通信通知的提醒信号。9.如权利要求7所述的机器人的自动模式安全系统,其中该提醒机制在该机器人进入安全状态,提醒机制随即停止。10.如权利要求1所述的机器人的自动模式安全系统,其中该控制器计时该静止状态预定时间后,自动指示机器人进入安全状态。11.如权利要求1所述的机器人的自动模式安全系统,其中该控制器展示灯号或响声或动作的安全警示机器人进入安全状态。12.如权利要求1所述的机器人的自动模式安全系统,其中该自动模式下手拉牵引该机器人完成作业后,让该手拉致能装置处于关状态,回至安全状态,经由再启动该启用机制,指示结束作业。13.如权利要求1所述的机器人的自动模式安全系统,其中该自动模式下手拉牵引该机器人完成作业后,让该手拉致能装置处于关状态,回至安全状态,在控制器计时等待预定时间后,让机器人回至自动模式,自动进行下一作业。
14.如权利要求1所述的机器人的自动模式安全系统,其中该手拉致能装置由可致能的致能开关以及启动手拉的软硬件开关组成。15.如权利要求14所述的机器人的自动模式安全系统,其中该手拉致能装置设置在该机器人的末端、该示教器、或具备电性与外接致能装置相连的端口。16.一种机器人的自动模式安全方法,包含:储存静止状态程序;让机器人在自动模式运行,运行静止状态程序至静止状态;让机器人进入安全状态;使手拉致能装置处于开状态,让机器人取消安全状态及进行手拉牵引机器人作业。17.如权利要求16所述的机器人的自动模式安全方法,其中该机器人进入静止状态后,提醒机器人在等待状态。18.如权利要求17所述的机器人的自动模式安全方法,其中在该等待状态,检查指示启用机制时,让机器人进入安全状态,检查未指示启用机制时,则继续在等待状态。19.如权利要求16所述的机器人的自动模式安全方法,其中该机器人进入静止状态后,计时时间。20.如权利要求19所述的机器人的自动模式安全方法,其中检查计时时间超过时限,直接让机器人进入安全状态,检查计时时间未超过时限,则继续计时时间。21.如权利要求16所述的机器人的自动模式安全方法,其中该机器人手拉牵引作业中,检查手拉致能装置处于关状态,让机器人进入安全状态,当检查手拉致能装置未处于关状态,则继续进行手拉机器人作业。22.如权利要求16所述的机器人的自动模式安全方法,其中该机器人检查结束作业,回至自动模式,自动进行下一作业,检查未结束作业时,则继续让机器人进入安全状态。23.如权利要求16所述的机器人的自动模式安全系统,其中该控制器展示安全警示机器人进入安全状态。
技术总结
一种机器人的自动模式安全系统及方法,通过静止状态程序,让自动模式运行的机器人进入等待状态,以提醒机制,提醒启动启用机制,使机器人进入安全状态,利用手拉致能装置取消安全状态,以手拉牵引机器人作业,确保自动模式下协作的安全性。协作的安全性。协作的安全性。
技术研发人员:王培睿 萧鼎亚
受保护的技术使用者:达明机器人股份有限公司
技术研发日:2021.07.14
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。